东北大学三轴工作平台Word格式.doc
《东北大学三轴工作平台Word格式.doc》由会员分享,可在线阅读,更多相关《东北大学三轴工作平台Word格式.doc(2页珍藏版)》请在冰豆网上搜索。
数控立式铣床工作平台
二.工作范围
通过在控制面板编程,导入数据,由平台定位加工原件,根据程序进行X,Y,Z轴的位移。
启动刀具回转,由平台的X,Y轴水平运动及Z轴的刀具上下运动,达到三轴运动工作。
具体操作为,由程序控制伺服电机进行运转,通过变速,丝杠转动实现XYZ轴位移,达到对原件的切削加工。
三.阐述运动分配方案
运动分配如上所述,通过电机驱动,丝杠传动是滚动导轨带动工作台进行X,Y轴的水平运动,通过程序控制电机,丝杠传动使刀具做Z轴垂直运动。
达到三轴运动。
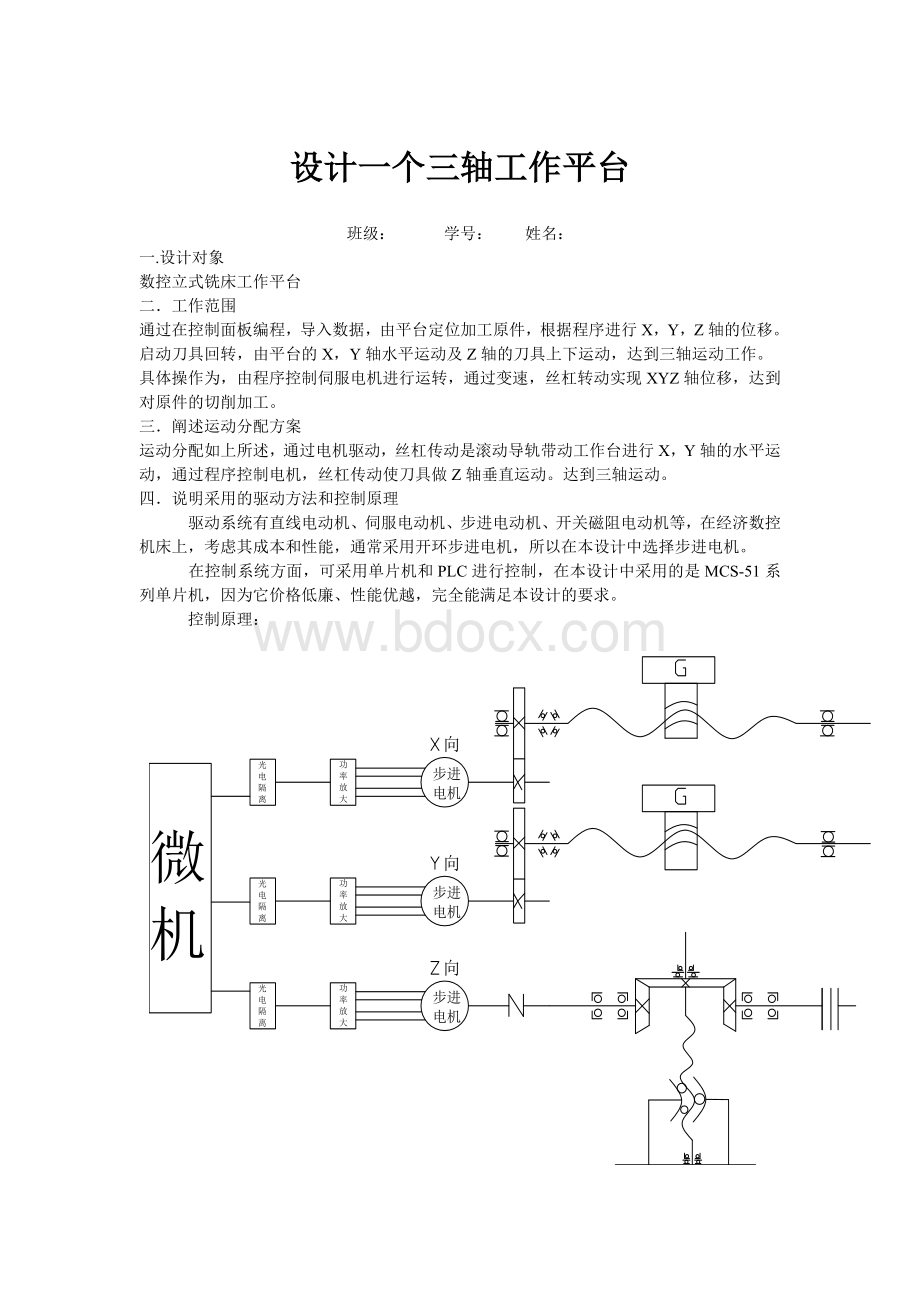
四.说明采用的驱动方法和控制原理
驱动系统有直线电动机、伺服电动机、步进电动机、开关磁阻电动机等,在经济数控机床上,考虑其成本和性能,通常采用开环步进电机,所以在本设计中选择步进电机。
在控制系统方面,可采用单片机和PLC进行控制,在本设计中采用的是MCS-51系列单片机,因为它价格低廉、性能优越,完全能满足本设计的要求。
控制原理:
根据图上所示:
通过控制台进行光电传感器测距,然后定位坐标系,启动步进电机控制平台水平运动及刀具垂直运动。
反馈元件
输出
执行元件
控制器
放大器
传感器测距
X
加工原件
控制系统示意图:
五.阐述保证运动精度的方法
(1)控制系统中传感器精度,反馈系统的补偿。
(2)选择滚动导轨,摩擦阻力小,移动轻便,磨损小,精度保持性好,定位精度高。
(3)采用滚珠丝杆传动,定位精度高,丝杠的传动精度高。
(4)为保证一定的传动精度和平稳性以及结构的紧凑,采用滚珠丝杠螺母传动副。
六.说明关键部件的选择依据
动力部件:
驱动系统有直线电动机、伺服电动机、步进电动机、开关磁阻电动机等,在经济数控机床上,考虑其成本和性能,通常采用开环步进电机,所以在本设计中选择步进电机。
传动部件:
在传动方面有齿轮传动和滚珠丝杆传动等类型。
在本设计中采用滚珠丝杆传动,因为采用滚珠丝杆有一下优点:
a.承载小;
b.移动速度快;
c.噪音低;
d.定位精度高等。
导向元件:
三轴立式铣床导轨类型分为:
滑动导轨、滚动导轨、静压导轨等类型。
在本设计中采用滚动导轨,其原因是:
a.灵敏度高,运动平稳,低速移动时不易出现爬行现象;
b.定位精度高;
c.摩擦阻力小,移动轻便,磨损小,精度保持性好,寿命长。
控制元件:
在控制系统方面,可采用单片机和PLC进行控制,在本设计中采用的是MCS-51系列单片机,因为它价格低廉、性能优越,完全能满足本设计的要求。
 升级会员
升级会员 