南航《自动控制原理》考研模拟试题与答案.docx
《南航《自动控制原理》考研模拟试题与答案.docx》由会员分享,可在线阅读,更多相关《南航《自动控制原理》考研模拟试题与答案.docx(9页珍藏版)》请在冰豆网上搜索。
南航《自动控制原理》考研模拟试题与答案
南航820自动控制原理模拟题一
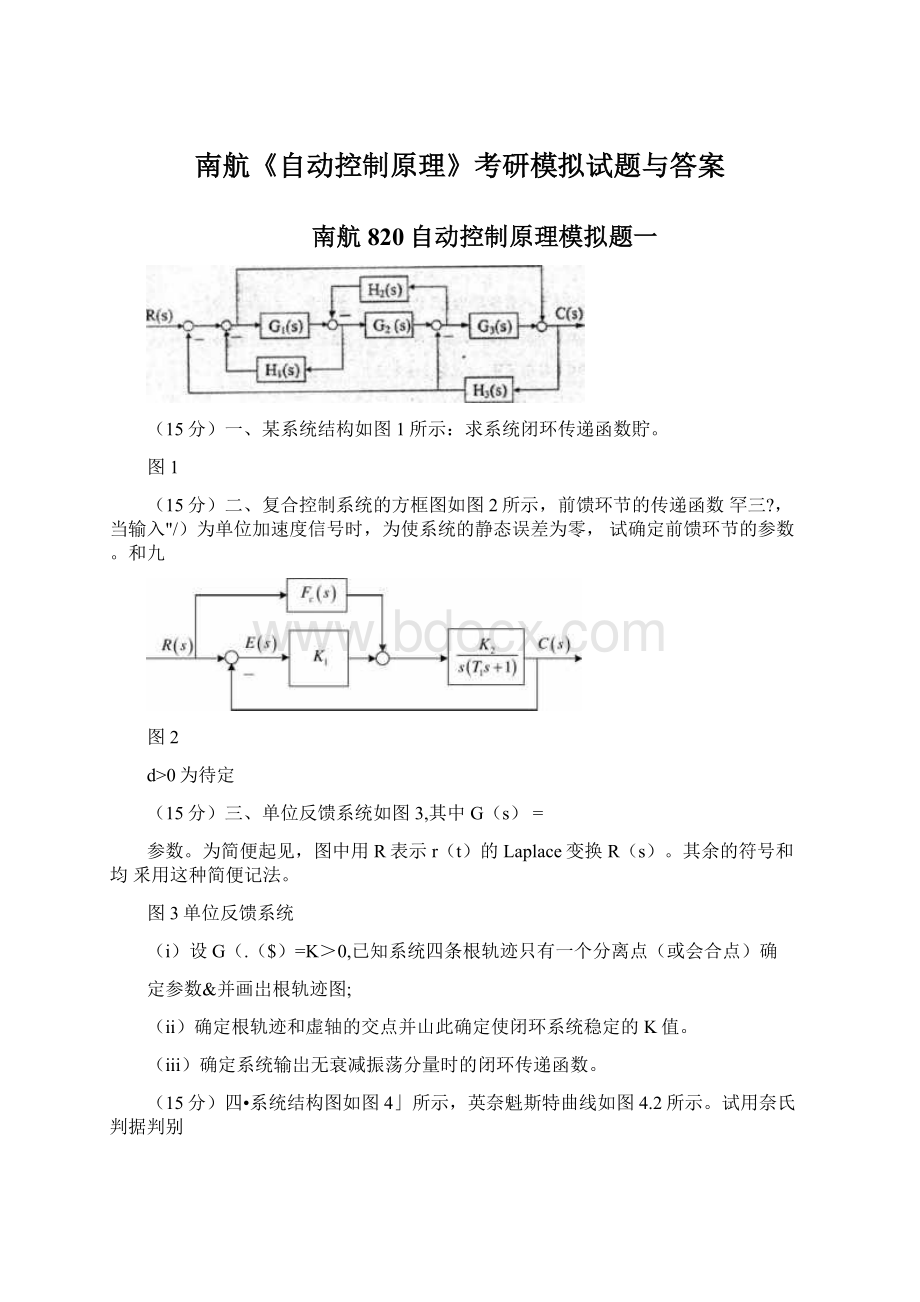
(15分)一、某系统结构如图1所示:
求系统闭环传递函数貯。
图1
(15分)二、复合控制系统的方框图如图2所示,前馈环节的传递函数罕三?
,当输入"/)为单位加速度信号时,为使系统的静态误差为零,试确定前馈环节的参数。
和九
图2
d>0为待定
(15分)三、单位反馈系统如图3,其中G(s)=
参数。
为简便起见,图中用R表示r(t)的Laplace变换R(s)。
其余的符号和均釆用这种简便记法。
图3单位反馈系统
(i)设G(.($)=K>0,已知系统四条根轨迹只有一个分离点(或会合点)确
定参数&并画岀根轨迹图;
(ii)确定根轨迹和虚轴的交点并山此确定使闭环系统稳定的K值。
(iii)确定系统输岀无衰减振荡分量时的闭环传递函数。
(15分)四•系统结构图如图4」所示,英奈魁斯特曲线如图4.2所示。
试用奈氏判据判别
其稳左性。
图4」
图4.2
(15分)五.系统结构图5如下,要求相稳泄裕度y(^.)>45°,截止频率>50rad/s
(15分)六、已知离散系统结构图如下图6所示,试求系统闭环脉冲传递函数表达式。
图6
(20分)七、如下图7所示系统中,若选取xl,x2,x3作为状态变量,试列写状态空间表达式,并写成矩阵形式。
图7
(20分)八、已知系统结构图8如右,试求系统产生自振时的振幅和频率(M=l),理想继
4M
电特性描述函数为N(X)=—
(20分)九.某被控对象动态方程如下:
2101
.0200
x=001x+1u,y=l01
(1)求传递函数:
(2)判断系统可控可测性:
(3)设讣状态观测器,将观测极点配置在
一、解:
本系统有六个单独回路
厶=—GiH]一一Ln=-G2H2--Ly=-GyHy--L4=-G{G2GyHy
L5=-H3--=-H,H2Hx(注意这个回路,易漏掉
互补接触回路有两纟出厶和厶J
前向通路有两条:
Px=G1G2G:
3,A1=up2=i,a2=\+g2h2
C(S)_工人亠
R(s)i_f厶+工站
_G]G2G3+(1+G2H2)
一1+G0+G》H’+G3H3+GGG3H3+H\+时屮丄+G\HGH\+HGH?
二、解:
系统误差传递函数为
R(s)
"⑴—/?
(5)_(l+7>)[s(7]s+l)+KAj
q—、厂1耳可斎+(7;+石一心)卄(1一心)]务=饮盹应(沪仞•产—(i+M叶)+虫」—由上式可得,只有令
7;+T2—K2a=0
l—KQ=0
・J
时才能满足要求,山此得岀:
三、解:
(i)由分离点的计算公式齐丘
依题意,得分离点〃=-1,代入上式得a=2
则开环传递函数G"(S)=丫2牙F
s(f+2+2s+2丿
1开环极点卩=0,P1=-2p3A=-\±j数目n二4;系统有四条根轨迹;
分别起始于开环极点,终止于无穷远点;
2实轴上根轨迹段为(-2,0);
3渐近线与实轴夹角为乞=45°,135°,225°,315°;渐近线与实轴的交点
6=-1;
④由已知,得分离点为-1;
山以上计算得到的参数,得根轨迹如图1所示:
(ii)根轨迹与虚轴的交点
由1+G°(s)=0,得特征方程为
s4+4s"+6疋+4s+K=0
劳斯阵:
S4
1
6K
s'
4
4
S2
5
K
20-4K
5-
要与虚轴有交点,则有一行全零,即20-4K=0=>K=5
辅助方程:
5s2+5=0=>5|2=±j
综上,与虚轴的交点是土j,使闭环系统稳定的K值范围应是0(iii)要使闭环系统的输出无衰减分量,则闭环系统应无共辄复数极点,亦即闭环极点均应为实极点。
显然只有5=-1点能满足要求,所以分离点处对应的四重实极点即为所求的闭环极点。
此时系统的闭环传递函数为:
①(0=厂—(K=l)
($+1)
四、解析:
系统的开环传递函数:
10
G(s)=200-{——•厂(()2雹)——}
]+2$・「
s~(0・2s+1)
_1000()
—■心2+5$+100)
显见,系统开环传递函数的极点均在S左半平而(没有不稳眾的极点),即P=0
又,按已知的奈魁斯特曲线,它顺时针绕(一1,jO)2次,即N=2
根据奈魁斯特稳左判据,闭环系统位于右半平而的极点数:
Z=N+P=2+0=2故可判左此系统闭坏不稳左。
五、解题:
原系统的截I匕频率为44.16rad/s,相稳定裕度为
180°一90°一必tan4.416=12.76°
可见截止频率和相稳立裕度都不满足要求,需加入串联超前校正,选择校正网络的传
递函数为
取校正后系统的截止频率叭=52wd/s,相稳泄裕度为卩=50°
cd=丄,201gK+101ga=2.6»11°+arcsin—_-=50°
y/aTa+]
由上述三式得
a=4.4,T=0.01,K=0.64
G《G(s)=
128(0.045+1)
5(0.15+1)(0.015+1)
校正后系统的截止频率为皱=53m〃/s・相角裕度y=49.5°满足要求。
六、解析:
曲=I十H舟⑺
七、
由结构图可得
2(“一乂|)=」.、+3.门
•・•
2(.r;—心)—J)+・厂;
聲理可得系统状态空间表达式
写成矩阵形式
一0
0
1
9
Xk
-2
-3
0
*+
9
■
-0
2
-3.
_0_
判断周期运动的稳泄性:
在点A处,当振幅变大工作点向左偏离G(»,G(»不包含此工作点,所以系统不含有右半平而极点,故系统稳左,工作点回到A点:
当振幅变小工作点向右偏离,G(Je)包含此工作点,系统不稳泄,工作点振幅增大回到A点,所以A点为稳左的周期运动,系统存在自振。
令G(jco)虚部为0,得3=近(自振频率)
l-30-305
求实部值:
ReG(yV2)=—;;==一一=-1.667
(/+1)(/+4)亠書(2+1)(2+4)3
所以Gg和是交与<-1.667,0)点。
幅值)
所以=2」22
九.1)
(2)先判断可控性:
124
S=[bAbA2b~\=000
[111
det5=0
故系统不可控。
判断可观性:
C
'ior
v=
cA
=
211
cA2
441
detSH0
故系统可观。
(3)将观测器增益矩阵H写成
~hx'
「2-九
1
H=
力2
He=
[ioA
~h2
2
-h2
0
-L
观测器的特征方程为
5-(2-/0-1
h2
$_(1_心)
\sl一(A_Hc)\=h2s_2
忙0
=s—(5—h、—hjs"+(8—3/片—4〃3+人)$—4+4h?
+2/片—爲
根据给左的特征值,可求出期望的多项式为(5+4)3=?
+1252+48$+64
h2=216,h3=125
比较上述两多项式中s的同次项系数得力|=-10&
因此观测器的方程为$•=
1101108■
"r
■-108'
-2162-216
八
x+
0
ll+
216
-1250-124.
1
125.
 升级会员
升级会员 