小车多方式运行的PLC控制课程设计Word文档下载推荐.docx
《小车多方式运行的PLC控制课程设计Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《小车多方式运行的PLC控制课程设计Word文档下载推荐.docx(10页珍藏版)》请在冰豆网上搜索。
2.1系统硬件组成
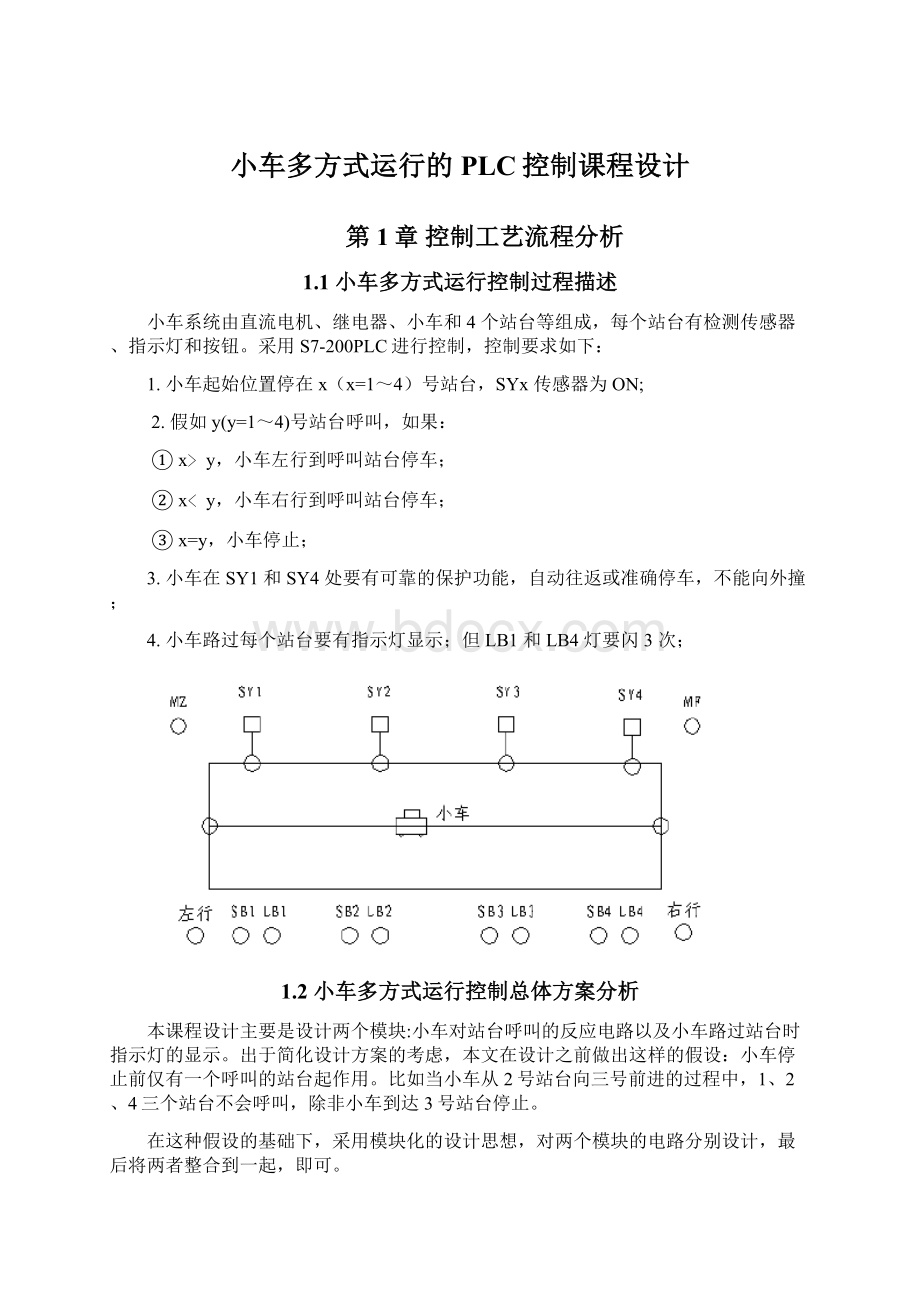
小车系统由直流电机、继电器、小车和4个站台等组成,每个站台有检测传感器、指示灯和按钮。
2.2控制方法分析
本课程设计主要是设计两个模块:
2.3I/O分配
经过对控制过程和要求的详细分析,明确了具体的控制过程。
2.假如y(y=1~4)号站台呼叫,如果:
如上所述,由此可以得出所需PLC的输入点9个,输出点6个。
本设计使用9个输入继电器,6个输出继电器,6个辅助继电器(各辅助继电器的功能在程序程序对应部分会有说明)。
输入输出继电器的选择与对应关系如下表:
表2-1I/O分配表
输入
功能说明
输出
SB0
X0
启动/停止
KM1
Y1
左行
SB1
X1
呼叫站台1
KM2
Y2
右行
SB2
X2
呼叫站台2
R1
Y10
第一个站台的指示灯
SB3
X3
呼叫站台3
R2
Y20
第二个站台的指示灯
SB4
X4
呼叫站台4
R3
Y30
第三个站台的指示灯
SQ1
X11
限位1
R4
Y40
第四个站台的指示灯
SQ2
X12
限位2
SQ3
X13
限位3
SQ4
X14
限位4
2.4系统接线图设计
图2-2系统接线图
第3章控制系统梯形图程序设计
3.1控制程序流程图设计
图3-1控制程序流程图
3.2控制程序梯形图设计
(见附录)
3.3控制程序设计思路
1、小车对站台呼叫的反应电路
取两个寄存器,分别存放呼叫的站台以及小车停靠的站台(本文的设计中这两个寄存器分别为D0和D1),显然,我们可以通过cmp指令进行x,y的大小判断,当x>
y时,执行左行命令(即本文设计程序中的SETY1指令);
当x<
y时,执行右行命令(即本文设计程序中的SETY2指令);
当x=y时,执行左行命令(即本文设计程序中的RSTY1和RSTY2指令)。
在这样的思路下,我们不可避免的将遇到三个问题:
如何在D0中存放所呼叫的站台?
如何准确获取并在D1中存放小车停靠的位置?
执行左行或右行命令后,如何使得小车在指定站台停止,并同时记录下新的停靠位置,即更新D1寄存器的内容?
对于第一个问题,直接运用mov指令即可。
方法是设置四个输入继电器x1,x2,x3,x4分别表示第i个站台呼叫,当xi接通时,执行movkiD0,(i取1、2、3,4)。
对于第二个问题,解决方法是当小车停止时,即相应的到位开关SQ1、SQ2、SQ3或SQ4接通时,执行movKiD1,(i取1、2、3,4)。
第三个问题,判断小车停止的条件是使用到位开关SQ,本文的程序里使用四个继电器x11,x12,x13,x14来表示。
2、小车路过站台时指示灯的显示
本文的程序里用Y10,Y20,Y30,Y40分别表示第1、2、3、4站台的指示灯。
根据题目要求,当小车路过站台时,对应的站台的指示灯要亮,对于第2,3站台指示灯,这个效果直接用指令LDX12,OUTY20;
LDX13,OUTY30即可控制。
但是对于第1、4号站台,要求指示灯闪烁三次,则像上面这样简单的指令是不能满足要求的,需要引入定时器(用以控制“闪烁”的间隔时间)和计数器(用以控制闪烁“3次”)。
详细控制图和程序见后文。
另外,考虑到这两个站台指示灯的功能相同,因此程序里可以使用子程序,以减少定时器、计数器和继电器的个数,同时亦能提高程序运行的效率和可靠性。
第4章系统调试及结果分析
4.1系统调试及解决的问题
按要求输入梯形图,检查并编译。
本次设计实验里,正确输入梯形图,编译成功。
同时通过在线工作后把程序写入可编程序控制器的程序存储区,然后进行运行调试,在前面正确操作和正常进行的基础上,使PLC进入运行状态,观察运行情况,结果是本PLC设计运行正常,没有未知错误,对于多组不同站台呼叫的检测数据,小车均能够以预想的行动路线运动,即能够实现循环工作。
4.2结果分析
根据以上调试情况,该小车多方式运行的PLC控制设计符合要求。
第5章课程设计心得
通过此次课程设计,让我对PLC梯形图、指令表、顺序功能图有了更好的了解,也让我了解了关于PLC设计原理。
有很多设计理念来源于实际,从中找出最适合的设计方法。
PLC课程都是极理论的东西,所做过的几个实验也都是在已知程序图的情况下学习使用编程器,这并不能提高PLC的设计水平,而这次的课程设计是从根本上让我们理论联系实际,在这种根据实际状况进行系统设计的情况下能够让我们对PLC有更深刻的认识。
不积跬步何以至千里,课程设计是大学学习阶段非常难得的理论与实际相结合的机会,通过这次课程设计,我摆脱了单纯的理论知识学习状态,和实际设计的结合,锻炼了综合运用所学的专业基础知识的能力,提高了查阅文献资料、设计手册的能力,而且通过对整体的掌控,对局部的取舍,以及对细节的斟酌处理,使得能力得到了锻炼,经验得到了丰富,并且意志品质力,毅力及耐力也都得到了不同程度的提升。
参考文献
[1]陈宏钧.可编程控制器课程设计指导书[M].天津:
天津大学出版社.2001
[2]钟肇新,王灏.可编程控制器入门教程[M].广州:
华南理工大学出版社.1999
[3]邓星钟.机电传动控制[M].武汉:
华中科技大学出版社.2001
[4]谭维瑜.电机与电气控制[M].北京:
机械工业出版社.1999
[5]姜培刚,盖玉先.机电一体化系统设计[M].北京:
机械工业出版社.2004.
附录
小车多方式运行程序的指令表如下:
LDX0
MCN0
M100
LDX1
MOVK1D0
LDX1
ORM101
MPS
ANIX11
SETM101
MPP
ANDX11
MOVK1D1
LDX2
MOVK2D0
LDX2
ORM102
ANIX12
SETM102
ANDX12
MOVK2D1
LDX3
MOVK3D0
LDX3
ORM103
ANIX13
SETM103
ANDX13
MOVK3D1
LDX4
MOVK4D0
LDX4
ORM104
ANIX14
SETM104
ANDX14
MOVK4D1
LDM101
CMPD0D1M0
MRD
ANDM0
SETY1
ANDM1
RSTY1
RSTY2
ANDM2
LDX12
OUTY20
LDX13
OUTY30
LDX11
OUTM105
ANDM106
OUTY10
LDX14
OUTY40
LDM105
CALLP0
FEND
P0
RSTC1
OUTT1
K5
LDT1
ANIT3
ORC1
OUTT2
LDT2
OUTT3
LDT3
OUTC1
K3
SRET
MCRN0
END
小车多方式运行程序的梯形图如下:
 升级会员
升级会员 