自动控制原理第三章答案Word文档下载推荐.doc
《自动控制原理第三章答案Word文档下载推荐.doc》由会员分享,可在线阅读,更多相关《自动控制原理第三章答案Word文档下载推荐.doc(12页珍藏版)》请在冰豆网上搜索。
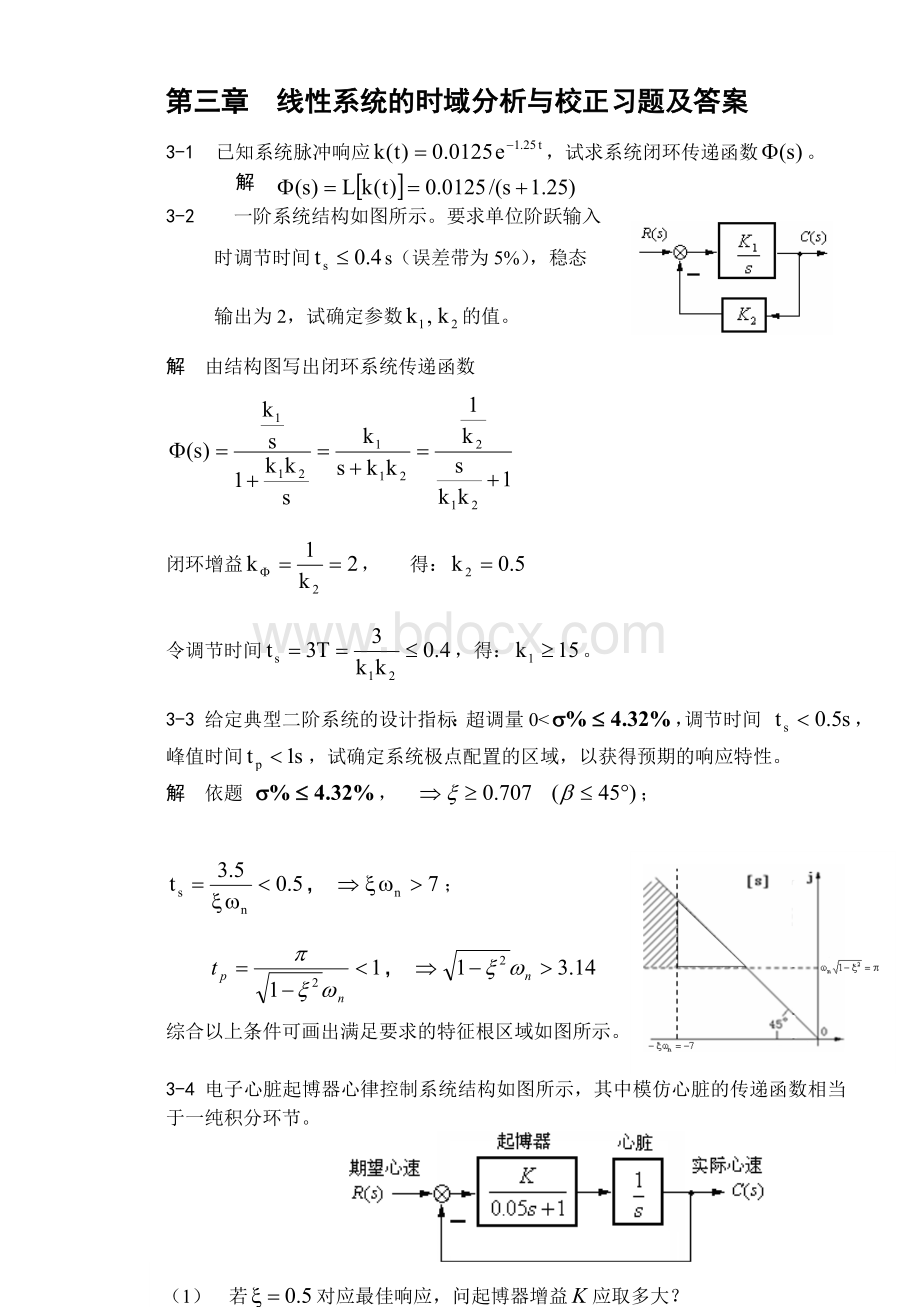
综合以上条件可画出满足要求的特征根区域如图所示。
(1)若对应最佳响应,问起博器增益应取多大?
(2)若期望心速为60次/min,并突然接通起博器,问1s钟后实际心速为多少?
瞬时最大心速多大?
3-4电子心脏起博器心律控制系统结构如图所示,其中模仿心脏的传递函数相当于一纯积分环节。
解依题,系统传递函数为
令可解出
将代入二阶系统阶跃响应公式
可得
时,系统超调量,最大心速为
3-5机器人控制系统结构如图所示,试确定
参数值,使系统阶跃响应的峰值时间
s,超调量。
解依题,系统传递函数为
由联立求解得
比较分母系数得
3-6图(a)所示系统的单位阶跃响应如图(b)所示。
试确定系统参数,a和传递函数C(s)/R(s)。
解由系统阶跃响应曲线有
系统闭环传递函数为
(1)由联立求解得
由式
(1)
另外
3-7已知系统的特征方程为D(s),试判断系统的稳定性,并确定在右半s平面根的个数及纯虚根。
(1)
(2)
(3)
(4)
(5)
解
(1)
Routh:
s3124
s28100
s192
s0 100第一列同号,所以系统稳定。
s4352
s3101
s24720
s1-153
s0 20
第一列元素变号两次,有2个正实部根。
(3)=0
S51211
S42410
S312
S2
S
S0
(4)=0
s511232
s432448
s30
s248
s辅助方程,
s24辅助方程求导:
s048
第一列没有变号,系统没有正实部根。
对辅助方程求解,得到系统一对虚根,系统不稳定。
(5)
s414-5
s3-22
s210-10
s10辅助方程
s120辅助方程求导
s0 -10
第一列元素变号3次,有3个正实部根,系统不稳定。
.
解辅助方程得:
s1=-1,s2=+1,由长除法得s3=+1+j2,s4=+1-j2
3-8单位反馈系统的开环传递函数,试判断系统稳定性;
若要求系统特征根的实部不大于,试确定k的取值范围。
解特征方程为:
Routh:
S3115
S28k
S120-k
S0k
时系统稳定。
做代换有:
S312
S25k-8
S18-k
S0k-8
系统特征根的实部不大于的k值范围为:
3-9下图是船舶横摇镇定系统结构图,为增加船只的阻尼引入了内环速度反馈。
(1)动力矩对船只倾斜角的传递函数;
(2)单位阶跃时倾斜角的终值不超过0.1,且系统的阻尼比为0.5,求、和应满足的方程。
解
(1)
(2)由题意知:
得。
由有:
,可得
最终得:
3-10温度计的传递函数为,用其测量容器内的水温,1min才能显示出该温度的98%的数值。
若加热容器使水温按10º
C/min的速度匀速上升,问温度计的稳态指示误差有多大?
解法一依题意,温度计闭环传递函数
,由一阶系统阶跃响应特性可知:
,因此有,得出。
视温度计为单位反馈系统,则开环传递函数为
用静态误差系数法,当时,。
解法二依题意,系统误差定义为,应有
3-11某单位反馈系统的开环传递函数如下,试求系统的静态误差系数及输入信号分别为和时系统的稳态误差。
解
由静态误差系数法
时,
时,
时,
3-12试确定图示系统中参数和的值,使系统对而言是II型系统。
解
依题意应有:
联立求解得
此时系统开环传递函数为
考虑系统的稳定性,系统特征方程为
当,,时,系统稳定。
3-13设复合控制系统结构如图所示,试确定使系统在作用下无稳态误差。
解系统误差传递函数
由劳斯判据,当、、、和均大于零,且时,系统稳定。
令得
3-14设复合校正控制系统结构如图所示,其中N(s)为可量测扰动。
若要求系统输出C(s)完全不受N(s)的影响,且跟踪阶跃指令的稳态误差为零,试确定前馈补偿装置Gc1(s)和串联校正装置Gc2(s)。
解
(1)求。
得:
。
(2)求。
令
当作用时,令
明显地,取可以达到目的。
3-15设复合控制系统结构如图所示。
图中为前馈补偿装置的传递函数,为测速发电机及分压电位器的传递函数,为可量测扰动。
如果,试确
定、和K1,使系统输出量完
全不受扰动的影响,且单位阶跃响应的超调
量,峰值时间。
解
(1)确定。
由梅逊公式
解得
(2)确定。
比较有由题目要求
可解得
有
3-16设无零点的单位反馈二阶系统的单位阶跃响应h(t)曲线如图所示,
(1)试求出该系统的开环传递函数及参数;
(2)确定串联校正装置的传递函数,使系统对阶跃输入的稳态误差为零。
解
1、由题意知,系统为零型系统
超调量,所以阻尼比
由,得k=19,
再根据求出,所以
或者:
由于设,
由,
得
开环传递函数
2、为使稳态误差为零,系统必须稳定,且至少为І型系统,所以串联校正
装置设为,由劳斯判据求得:
 升级会员
升级会员 