基于双电机耦合动力系统的最优动态控制策略的设计说明书.docx
《基于双电机耦合动力系统的最优动态控制策略的设计说明书.docx》由会员分享,可在线阅读,更多相关《基于双电机耦合动力系统的最优动态控制策略的设计说明书.docx(18页珍藏版)》请在冰豆网上搜索。
基于双电机耦合动力系统的最优动态控制策略的设计说明书
基于双电机耦合动力系统的最优动态控制策略的设计
1.绪论
将电动汽车运用于公共交通领域是减少空气污染和解决石油资源短缺的一个好途径。
发展电动公共汽车对节能减排和电动汽车产业都有显著的意义。
对高动力驱动系统控制策略是发展电动公共汽车的关键技术之一。
由行星齿轮实现的双电机耦合驱动系统是实现高动力驱动的有效途径。
当然,由于双电机耦合系统的性质,其控制策略相比传统汽车更复杂。
因此,在设计出最后的样机之前,应该用系统级的车辆仿真方法进行准确的选型和匹配,研究和制定有效的节能控制方法。
用于电动汽车的电源控制策略可大致分为三类(见[1,2])。
第一种采用启发式控制技术,如控制规则/模糊逻辑/用估计和控制算法开发神经网络等(见[3,4])。
第二种方法是基于静态的优化方法(见[5,6])。
执行优化时,第三种电动车的控制算法考虑了系统的动态特性(见[7-9])。
另外,该优化是考虑的是时间范围,而不是时间瞬间。
在一般情况下,从动态优化方法得到的动力分割算法在瞬态条件下更准确但计算上更复杂。
在本文中,动态规划技术被用来求解双电机耦合动力系统的最优控制策略问题。
在一个驾驶循环中,其最优控制策略是根据定义的成本函数的最小值而获得的。
两种工况的最优控制策略得到解决:
一种只考虑能量损失,第二种是考虑能量损耗/切换频率。
这两种工况的比较还提供了当乘坐舒适性被作为额外目标添加时系统所需的改变。
然而,动态规划控制由于自身的预览性质和需要繁重的计算,其控制策略不太好实现。
在另一方面,动态规划又是用来分析、评估和调整控制策略的好工具。
在我们仔细学习了动态规划解决方法的特性后,提取了可执行的规则。
这些规则被用来改善一些简单的,基于直觉的算法。
并且发现,基于规则的算法可以显著改善。
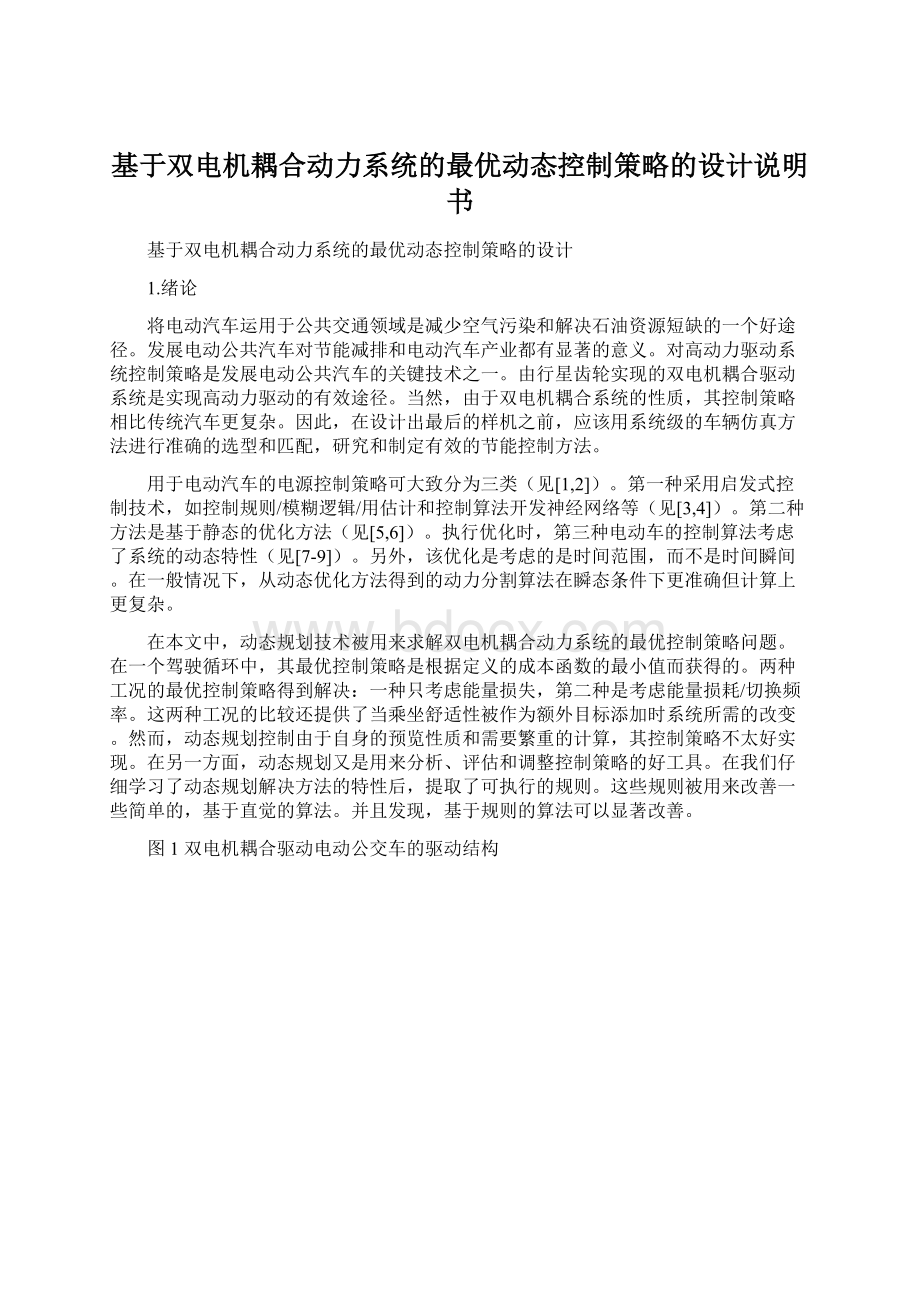
图1双电机耦合驱动电动公交车的驱动结构
表1实验车和双电机耦合驱动系统的参数
名称
数值
单位
汽车质量(Mvehicle)
18000
千克
轮胎半径(r)
0.4785
米
滚动阻力系数(f)
0.015
无
迎风面积(A)
7.5438
平方米
空气阻力系数(CD)
0.8
无
主减速比i0
6.34
无
电动机最大扭矩(Tmax)
410
牛米
电动机最大转速(Nmax)
6000
转/每分钟
PGT特征参数(K)
3.5
无
本文的结构安排如下。
在第2节,描述双电机耦合驱动电动公交车模型,随后解释基于规则的初级控制策略。
第3节介绍动态优化问题和动态规划程序。
第4节给出对于能量损失工况和能量损失/切换频率工况优化情况下的优化结果。
第5节描述了改进后的基于规则的控制策略的设计。
最后,第6节给出结论。
2.双电机耦合驱动电动公交车的结构和基于规则的初级控制策略
2.1双电机耦合驱动电动公交车的结构和模型
实验车辆是普通的公交车,但它的发动机和传动部分被北京理工大学研制的双电机耦合驱动系统所代替[10]。
公交车的结构如图1所示,其动力来源是主电机和副电机,两个电机通过行星齿轮系统耦合在一起。
其中,主电机连接太阳轮,副电机连接齿圈,耦合后的动力通过传动系统由行星架传向车轮。
图1中B代表可以通过锁定齿圈平滑实现模式切换的湿式离合器。
实验车和双电机耦合驱动系统的参数见表1。
2.2基于规则的初级控制策略
与混合动力汽车相比,纯电动汽车的动力管理策略似乎简单得多,因为大多数纯电动汽车只有一个驱动电机,这意味着电动机的输出功率直接由驾驶员所要求的功率来确定。
在双电机耦合驱动系统中,有四个可能的操作模式:
单电机驱动模式、双电机驱动模式、单电机再生制动模式、双电机再生制动模式。
为了降低能量损耗,动力管理控制器必须在满足驾驶者需求的同时,确定操作模式和两个动力源适当的动力分配比例。
当系统是在双电机条件工作时,耦合情况可以根据驱动系统的结构分为转矩耦合和转速耦合。
转矩耦合驱动系统的动力源的动力分配可以通过确定扭矩分配来实现,同时,转速耦合驱动系统的动力源的动力分配可以通过确定两个动力源之间的速度比来实现。
基于规则的简单动力控制策略是由简单的汽车驱动特性分析和汽车动力需求发展来的[11],这是一种非常受欢迎的电动车设计方法。
根据车辆状态,该控制器的操作是由两个控制模式中的一个来确定:
模式切换控制和功率分配控制。
下面对每个控制规则的基本逻辑进行说明。
模式切换控制
该模式基于驱动系统的工作性能和电动机的效率图,如果车辆速度超过vp+或低于vp-,采用模式切换控制策略,以确定辅助电机是否工作,如公式
(2)所示。
vp+和vp-的关系如下所示:
(1)
从单电机驱动转换为双电机驱动:
从双电机驱动转换为单电机驱动:
(2)
其中速度差A是为了避免模式连续的切换,因为这会影响汽车的乘坐舒适性。
功率分配控制
该模式匹配的是转速耦合驱动系统,其功率分配比与速度比成正比。
同样,在该模式下有两种情况:
在单电机工作时,其驱动系统不需要动力分配控制,主电机将根据车速和油门/刹车的运动提供所有需要的功率。
在双电机工作时,考虑到电动机的效率特性,主电机将工作在速度相对高的固定点Nmain,而辅助电机的转速将根据车辆速度的需求而改变。
而且电机的输出转矩会同时根据油门/刹车的运动而改变。
速度分解的详细信息可以表示如下:
单电机模式
双电机模式(3)
这里的Ns是主电机的速度,主电机是直接连到太阳轮的;Nr是辅助电机的速度,辅助电机是直接连到齿圈的。
K可以通过K=Zr/Zs得到,Zr和Zs是齿圈和太阳轮的齿数。
3.动态最优化问题
和以规则为基础的算法相比,动态优化方法可以依靠一个动态模型(见[12,13])找到最佳的控制策略。
给定一个驾驶循环,以动态规划法为基础的算法可以获得不同限制时的最佳控制策略,最大限度地降低系统的能量损失。
本文采用一种以数值为基础的动态规划来解决有限范围内的动态优化问题。
3.1问题描述
在离散时间的形式,电动汽车电池的模型可以表示为:
(4)
这里的u(k)是包含一组控制变量的矢量,如驾驶系统命令的改变和辅助电机理想速度的增量;x(k)是系统的状态矢量,如系统的工作模式(单电机模式和双电机模式)和电机的速比。
控制问题的采样时间被定为一秒。
最优化的目标是找到输入u(k)来使成本函数最小,成本函数是由能量损失的加权和模型改变的频率组成的。
使最小成本函数的公式如下:
(5)
这里的N是驾驶循环的时间,L是瞬间的损失包括主电机的能量损失Lm(k)、辅助电机的能量损失La(k)、功率耦合齿轮箱的能量损耗Lc(k)和模式改变的损失
。
对于一个单能量的问题,权重因素ɑ设置为0)。
ɑ>0代表一全面的问题,它包含了能量的损失和模式改变的次数。
在最优化时,利用下面的不等式来保证主电机和辅助电机安全/合理的运行是必要的。
,
,
,
,(6)
这里的Ts是主电机的输出转矩,Tr是辅助电机的输出转矩。
除此之外,为了满足系统的特性,除了基本的约束,其它的约束也是需要的:
,(7)
这个约束是为了避免功率循环,它会极大地增加功率的损耗,所以我们在现实中是不希望看到它的。
另一个约束,是当Ns=0,Nr也应该是0。
这是因为我们目前的系统只有一个湿式离合器并且它是和齿圈固定在一起的。
这就意味着车辆行驶时,太阳轮也必须转动。
3.2模型简化
详细的DMCPS和DMCPEB模型都不适用于动态优化,这是因为其状态太多。
因此,开发了一个简化的但足够复杂的车辆模型。
双电机耦合驱动系统是一种转速耦合系统,可以分为两种工作模式(单电机工作模式和双电机工作模式)。
当双电机耦合驱动系统模型的参数被确定时,只有两方面的因素是主要影响因素,这就决定了只有这两个方面的状态变量需要被保持:
双电机的转速比和双电机耦合驱动系统的工作模式。
各子系统:
电机、汽车、变速器、电池和行星齿轮的简化被描述如下。
电机:
电动机的特性是基于效率数据,这是从文献[10]得到的,如图2所示。
图2电动机的效率图
从表1,我们可以得到:
虽然DMCPS需要两个电机,但是它们有相同的规格并且它们是相同的类型。
所以在这里,我们只显示了一个电机的效率图。
考虑到再生制动,在这里我们假设:
当电机的输出转矩是负的时,效率是相同的。
输出正力矩的值是和负转矩值的绝对值相同的。
电机效率
可以被表示为:
,(8)
这里的
是电机输出转矩的绝对值,Nm是电机的转速。
当车辆在紧急情况下制动时,DMCPS不能提供足够的制动力。
这里的制动策略被确定为系列策略:
当DMCPS可以提供足够的制动力,所有的制动力由DMCPS提供;当所需的制动力超过DMCPS的能力,DMCPS将提供最大的力矩,同时额外的力将由摩擦制动系统提供。
输出转矩
可以表示如下:
,(9)
这里的Tm,req是所需要的力矩。
汽车:
汽车被建模为一个质点:
(10)
其中,Tb(k)是摩擦制动力,i0是主减速器的减速比,K是行星齿轮系统的特性参数,Ff和Fa分别是滚动阻力和空气阻力,rt是轮胎半径,Mr是汽车的有效质量,Jr是汽车所有旋转部件的等效转动惯量。
Ff,Fa和Mr可由下列公式得出:
(11)
其中Mvehicle是汽车的质量,g是重力加速度,f是滚动阻力系数,CD是空气阻力系数,A是汽车有效迎风面积,ua是汽车的速度。
变速器:
其工作模式(单电机工作模式和双电机工作模式)被建模为时间增量为1秒的离散时间动态系统
(12)
其中,参数mx是在主要工作模式中,控制变速器,换挡的值-1,0,1,分别代表降档,不变,升档。
电池:
汽车使用的是锂离子电池,对于混动汽车和纯电动汽车来说,估算剩余电量(SOC)都是十分重要的[14-16]。
在本文中,主要集中研究双电机耦合驱动公交车和纯电动汽车,其电池只提供汽车所需的能量,并且不能根据某些驱动周期被优化为所需要的功率。
在这里我们假定电池可始终满足驱动周期所要求的功率而且电池中没有能量损耗。
行星齿轮系统:
基于行星齿轮系的工作性质,我们可以知道由于不同的效率,不同的控制策略会导致不同的能量损失,因此,也应建出行星齿轮系效率模型来计算能量损失。
而行星齿轮作为两自由度的机构,其效率可由下面公式计算得出:
(13)
其中
是汽车加速时行星齿轮的效率,
是汽车减速时行星齿轮的效率,
表示当齿圈固定,能量从太阳轮输入,行星架输出的效率,
表示当太阳轮固定,能量从齿圈输入,行星架输出的效率,
表示当太阳轮固定,能量从行星架输入,齿圈输出的效率,
表示当齿圈固定,能量从行星架输入,太阳轮输出的效率。
3.3动态规划
动态规划技术是基于贝尔曼最优性原则,其中规定我们首先设计最后一个阶段子问题的最优策略,然后逐渐扩展到设计最后两个阶段,最后三个阶段...等等,直到整个问题被解决。
以这种方式,整体动态优化设计可以分解成如下更简单的最小化问题(见[18,19])。
第N-1步:
考虑
(14)
第k步,当0≤k(15)
其中
是从k时段开始的参数x(k)的最优成本函数或是最优值函数。
它表示系统从参数x(k),时段k开始,而后遵从最优控制原则一直计算到最后一步的最优值。
上述递归方程是在求解寻找最优控制策略的方法。
而最小化问题被公式6的不等式和驱动周期的等式所约束。
3.4数值计算
双电机耦合驱动系统是一个非线性系统,该系统的动态规划必须由一些近似数值来求解。
例如解决公式(15)数值的标准方法是使用量化和内插(见[2,18])。
而对于连续状态空间和控制空间,状态和控制值首先离散化为有限的网格。
在优化搜索的每个步骤中,函数Jk(x(k))仅在状态变量的网格点中进行评价。
如果下一阶段的x(k+1)不完全落在量化值里,那么公式(15)中的
和公式(14)中的G(x(N))由线性内插法确定。
4.动态规划结果
上述动态规划过程提出了最优的,随时间变化的,状态反馈的控制规则。
在后文分两种情况介绍结果:
只有能量损失的问题和能量损失/模式变化的问题。
4.1仅能量损失问题的优化结果
当仅优化燃油经济性时,加权α设定为0,且使用了中国典型城市的道路循环工况。
在动态规划策略下的汽车仿真结果如图3,4,和5所示。
从图3和图4中,我们可以得知当车辆速度较低时,主电机将提供所需的速度和动力,而当车辆速度较高时,主电机转速将降到一个非常低的点,车辆所需的大部分速度和动力将由副电机来提供。
这是因为电动机在高转速低扭矩的工况下效率很低。
从图2中我们可以得知电动机效率在低转速低扭矩的工况下也很低,但是在这种工况下,输出功率也低,因此能量损失比在高速下少。
与主电机相比,副电机倾向于在高转速和高扭矩的条件下工作在高效率区。
从图5中我们可以得知双电机耦合驱动系统的能量损失可分为三类:
主电机损失,副电机损失,耦合装置损失。
其中副电机损失占主要部分,而主电机损失和耦合装置损失基本相等。
这是因为副电机总是在高功率状态工作,尽管它的工作效率相对主电机较高。
图3两电动机的转速
图4两电动机的输出扭矩
图5能耗分配
4.2能量损失/切换频率问题的优化结果
考虑到能量损失和切换频率之间的权重因子是多变的,其取值为ɑ=[0,0.01,0.1,1,2,3.5,5,10]。
ɑ的合理取值要满足公式(5),这种折中研究是在早期设计过程中非常重要的,因为它提供了有关能量损失和不断变化的频率之间的灵敏度的有用信息。
其能量损失和换挡次数随ɑ改变的变化趋势如图6所示。
从图6中我们可以得到,当ɑ<1且在增加时,换挡次数快速下降(从58降到24)而能量损失仅增加了少许,可忽略不计。
当1<ɑ<2时,能量损耗和换挡次数都变化很小。
当2<ɑ<5时,换挡次数再次快速下降,而能量损耗也快速增加。
当ɑ超过5时,换挡次数和能量损耗都保持不变。
因此,ɑ合理的取值是1到2之间.在进一步讨论中,我们设定ɑ=2。
从图7中我们得知为减小换挡次数,主电机会更倾向于在低速区工作。
与图5相比,换挡次数从58减少到22,其是原始动态规划结果的38%,而能量损耗从5943KJ增加至6431KJ,仅增加8.2%。
图6能耗和换挡次数随ɑ改变的变化趋势
图7当ɑ=2时的能耗分配
5.以规则为基础的控制策略的发展
动态规划控制策略在实际驾驶条件下是不可实现的,因为它需要预见下一刻的速度和道路条件。
尽管如此,分析其行为为改进基于规则的控制策略提供了有用的资料。
基于上述讨论的仿真结果,我们将换挡控制策略提炼成3种,分别是升档,降档和能量分流的策略。
5.1工作模式切换控制
工作模式转变在减少能量损失和增加乘坐舒适性中是至关重要的。
在原来的动态规划中,双电机耦合驱动系统需要频繁换档来减少能量损失,这可能会影响乘坐舒适性,并且当ɑ=2时,能量损失并没有增加很多,但换档次数只是原始动态规划结果的38%。
当ɑ=2时,基于动态规划的升档和降档的数据如图8和图9所示。
图8中的第一个图显示的是车辆正在加速的工况,而第二个图显示的是车辆制动时的工况。
分离工作模式的转换策略就可以通过手动连线得到了。
与其他方法相比,这项工作的好处是不仅确定了合理的换挡点,也帮助我们决定什么时候升档和降档,可避免在实际驾驶中频繁换挡。
其结果如图9所示。
图8换挡策略的提取
图9新的换挡策略
5.2能量分流控制
在本节中,我们通过分析当ɑ=2时的动态规划结果,研究了如何提高基于规则的初级算法的能量分流控制。
能量分流比PR的表示如下公式:
(16)
两种工作模式的定义:
单电机工作模式(PR=0)和功率耦合工作模式(0应当注意的是,PR的范围是[0,1)。
在单电机工作模式(PR=0),如以上所讨论的控制规则是唯一的。
这里我们只讨论耦合模式的控制规则。
图10给出了在动态规划结果的数据中提取的新能量分流策略。
从曲线可以看出,当车速超过20km/h时分流比在0.77左右波动;这是因为行星齿轮机构的特性参数被设定为3.5,而且在这个比率下,耦合装置的效率相对其他比率最高。
这表明,虽然耦合装置的能量损失相比副电机不是最多的,但它仍在减少能量损失中扮演重要角色。
5.3性能评估
结合前面几节中概述的工作模式切换控制和功率分流控制后,采用中国典型城市的驾驶循环来评估改进后的基于规则的控制策略。
表2显示了不同控制策略的差别。
我们可以从表中得知新的控制策略能有效减少双电机耦合驱动系统的能量损失。
具体得说,初级控制策略的主要能量损失来源于主电机,而新的控制策略的主要能量损失来源于副电机。
虽然新的控制策略减少了22%的能耗,但从动态规划操作中可以看出双电机耦合驱动系统还有减少36.9%能耗的潜力。
从表3中,我们可以得知新的策略并不需要增加换挡次数,但也不能改善换档的性能。
相反,动态规划(当ɑ=2时)能减少15.34%的换挡次数。
表2不同控制策略在能耗方面的比较
名称
主电机(KJ)
副电机(KJ)
耦合装置(KJ)
总损失(KJ)
提高百分比
初级策略
5302
2781
2158
10240
0%
新的策略
2938
3017
2030
7987
22%
动态规划(ɑ=2)
1848
2691
1922
6461
36.9%
表3不同控制策略在换挡次数的比较
换挡次数
提高百分比
初级策略
26
0%
新的策略
26
0%
动态规划(ɑ=2)
22
15.34%
6.结论
基于该简化模型,动态规划被用来解决全局最优控制策略。
从动态规划结果中提取规则来设计双电机耦合驱动公交车的控制策略具有近似最优、可容纳多重目标和系统性的优点。
根据总体目标,可以很容易地开发出强调较低能量损失和乘坐舒适性的控制策略。
通过分析的结果可以得出近似最优的换档阈值与功率分流比。
新的控制策略可以减少22%的能耗,而动态规划(ɑ=2)可以减少36.9的能耗。
参考文献
[1]Y.Zou,H.Shi-Jie,L.Dong-Ge,G.Wei,andX.Hu,“Optimalenergycontrolstrategydesignforahybridelectricvehicle,”DiscreteDynamicsinNatureandSociety,vol.2013,ArticleID132064,8pages,2013.
[2]C.C.Lin,H.Peng,J.W.Grizzle,andJ.M.Kang,“Powermanagementstrategyforaparallelhybridelectrictruck,”IEEETransactionsonControlSystemsTechnology,vol.11,no.6,pp.839–849,2003.
[3]B.M.Baumann,G.Washington,B.C.Glenn,andG.Rizzoni,“Mechatronicdesignandcontrolofhybridelectricvehicles,”IEEE/ASMETransactionsonMechatronics,vol.5,no.1,pp.58–72,2000.
[4]N.J.Schouten,M.A.Salman,andN.A.Kheir,“Fuzzylogiccontrolforparallelhybridvehicles,”IEEETransactionsonControlSystemsTechnology,vol.10,no.3,pp.460–468,2002.
[5]C.Kim,E.NamGoong,andS.Lee,“FueleconomyoptimizationforparallelhybridvehicleswithCVT,”SAEPaper1999-01-1148,1999.
[6]G.Paganelli,G.Ercole,A.Brahma,Y.Guezennec,andG.Rizzoni,“Ageneralformulationfortheinstantaneouscontrolofthepowersplitincharge-sustaininghybridelectricvehicles,”inProceedingsofthe5thInternationalSymposiumonAdvancedVehicleControl,AnnArbor,Mich,USA,2000.
[7]A.Brahma,Y.Guezennec,andG.Rizzoni,“Dynamicoptimizationofmechanicalelectricalpowerflowinparallelhybridelectricvehicles,”inProceedingsofthe5thInternationalSymposiumonAdvancedVehicleControl,AnnArbor,Mich,USA,2000.
[8]U.ZoelchandD.Schroeder,“Dynamicoptimizationmethodfordesignandratingofthecomponentsofahybridvehicle,”InternationalJournalofVehicleDesign,vol.19,no.1,pp.1–13,1998.
[9]C.-C.Lin,J.Kang,J.W.Grizzle,andH.Peng,“Energymanagementstrategyforaparallelhybridelectrictruck,”inProceedingsoftheAmericanControlConference,pp.2878–2883,Arlington,Va,USA,June2001.
[10]X.H.Wu,Matchingandcontrolstrategyofdualmotorscoupleddrivingsystemonelectricbuses[Ph.D.thesis],InstituteofTechnology,Beijing,China,2011.
[11]P.D.Bowles,Modelingandenergymanagementforaparallelhybridelectricvehicle(PHEV)withcontinuouslyvariabletransmission(CVT)[M.S.thesis],UniversityofMichigan,AnnArbor,Mich,USA,1999.
[12]H.He,H.Tang,andX.Wang,“Globaloptimalenergymanagementstrategyresearchforaplug-inseries-parallelhybridelectricbusbyusingdynamicprogramming,”M
 升级会员
升级会员 