信号与系统实验实验报告.docx
《信号与系统实验实验报告.docx》由会员分享,可在线阅读,更多相关《信号与系统实验实验报告.docx(21页珍藏版)》请在冰豆网上搜索。
信号与系统实验实验报告
实验五连续系统分析
1、实验目的
深刻理解连续时间系统的系统函数在分析连续系统的时域特性、频域特性及稳定性中的重要作用及意义,掌握根据系统函数的零极点设计简单的滤波器的方法。
掌握利用MATLAB分析连续系统的时域响应、频响特性和零极点的基本方法。
2、实验原理
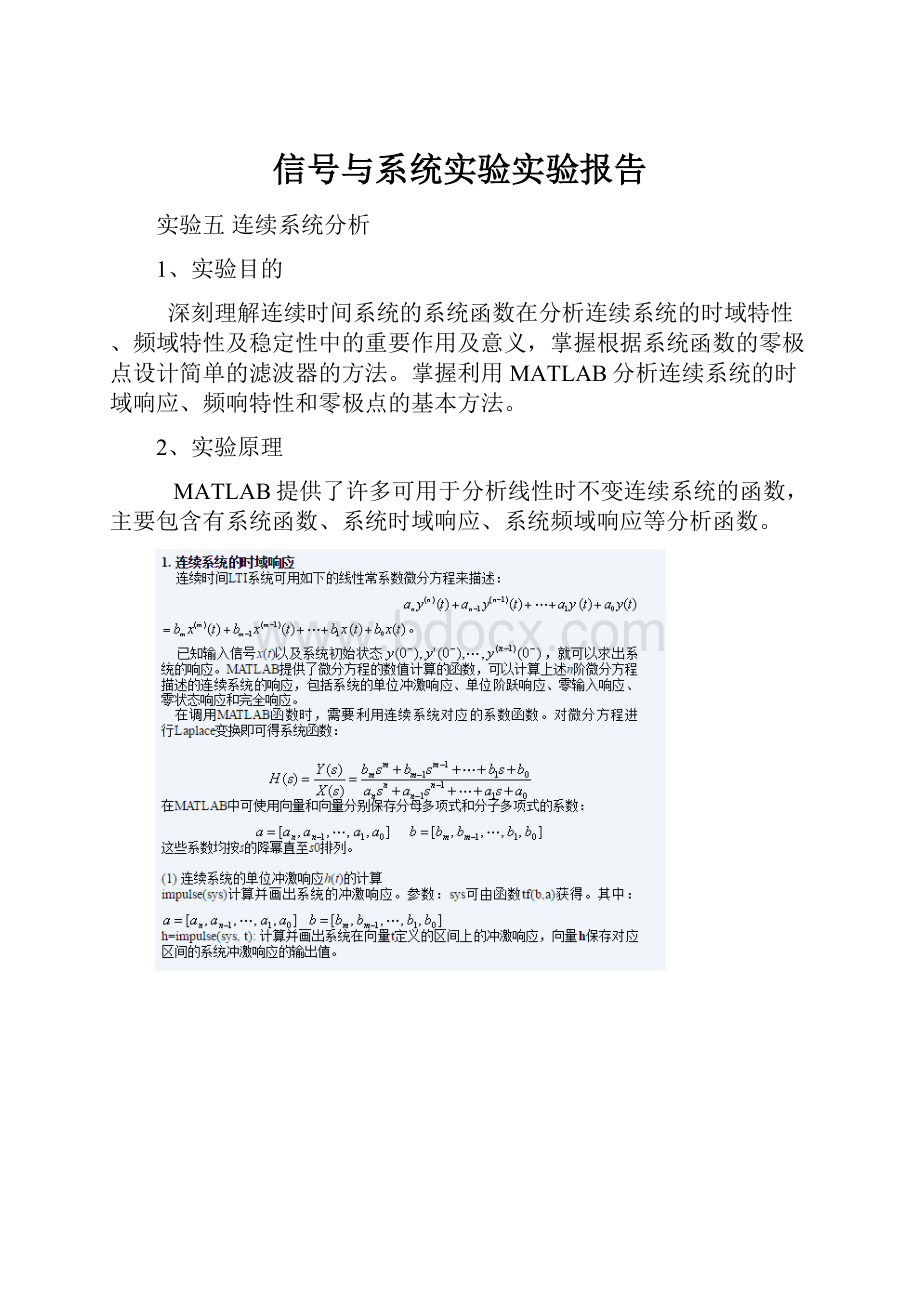
MATLAB提供了许多可用于分析线性时不变连续系统的函数,主要包含有系统函数、系统时域响应、系统频域响应等分析函数。
三、实验内容
1.已知描述连续系统的微分方程为
,输入
,初始状态
,计算该系统的响应,并与理论结果比较,列出系统响应分析的步骤。
实验代码:
a=[110];
b=[2];
[ABCD]=tf2ss(b,a);
sys=ss(A,B,C,D);
t=0:
0.001:
5;
xt=t>0;
sta=[1];
y=lsim(sys,xt,t,sta);
subplot(3,1,1);
plot(t,y);
xlabel('t');
title('系统完全响应y(t)');
subplot(3,1,2);
plot(t,y,'-b');
holdon
yt=4/5*exp(-10*t)+1/5;
plot(t,yt,':
r');
legend('数值计算','理论计算');holdoff
xlabel('t');
subplot(3,1,3);
k=y'-yt;
plot(t,k);
k
(1)
title('误差');
实验结果:
结果分析:
理论值y(t)=0.8*exp(-10t)*u(t)+0.2
程序运行出的结果与理论预期结果相差较大误差随时间增大而变小,初始值相差最大,而后两曲线基本吻合,表明该算法的系统响应在终值附近有很高的契合度,而在初值附近有较大的误差。
2. 已知连续时间系统的系统函数为
,求输入
分别为
,
,
时,系统地输出
,并与理论结果比较。
实验代码:
a=[1,3,2,0];b=[4,1];
sys=tf(b,a);
t=0:
0.001:
5;
x1=t>0;
x2=(sin(t)).*(t>0);
x3=(exp(-t)).*(t>0);
y1=lsim(sys,x1,t);
y2=lsim(sys,x2,t);
y3=lsim(sys,x3,t);
subplot(3,1,1);
plot(t,y1);
xlabel('t');
title('X(t)=u(t)');
subplot(3,1,2);
plot(t,y2);
xlabel('t');
title('X(t)=sint*u(t)');
subplot(3,1,3);
plot(t,y3);
xlabel('t');
title('X(t)=exp(-t)u(t)');
实验结果:
结果分析:
a=[1,3,2,0];b=[4,1];
sys=tf(b,a);
t=0:
0.001:
5;
x1=t>0;
x2=(sin(t)).*(t>0);
x3=(exp(-t)).*(t>0);
y1=lsim(sys,x1,t);
y2=lsim(sys,x2,t);
y3=lsim(sys,x3,t);
subplot(3,1,1);
plot(t,y1,'-b');
holdon
yt1=5/4+0.5*t.*(t>0)+7/4*exp(-2*t).*(t>0)-3*exp(-t).*(t>0);
plot(t,yt1,':
r');
legend('数值计算','理论计算');holdoff
xlabel('t');
subplot(3,1,2);
plot(t,y2,'-b');
holdon
yt2=0.5+1.5*exp(-t).*(t>0)-0.7*exp(-2*t).*(t>0)-1.3*cos(t).*(t>0)+0.1*sin(t).*(t>0);
plot(t,yt2,':
r');
legend('数值计算','理论计算');holdoff
xlabel('t');
subplot(3,1,3);
plot(t,y3,'-b');
holdon
yt3=0.5-4*exp(-t).*(t>0)+7/2*exp(-2*t).*(t>0)+3*t.*exp(-t).*(t>0);
plot(t,yt3,':
r');
legend('数值计算','理论计算');holdoff
xlabel('t');
可见数值计算和理论计算曲线基本重合。
误差分析:
可见误差小于0.001,计算值与理论值契合度很高。
3. 研究具有以下零极点的连续系统:
(a)1个极点s=—0.1,增益k=1。
(b)1个极点s=0,增益k=1。
(c)2个共轭极点
,增益k=1。
(d)2个共轭极点
,增益k=1。
(e) 零点在
,极点在
,增益k=1。
(f) 零点在
,极点在
,增益k=1。
完成下列任务:
(1) 利用zpk和tf命令建立系统的系统函数,画出系统的零极点图。
(2) 分析系统是否稳定。
若稳定,画出系统的幅频特性曲线。
(3) 画出系统的冲激响应波形。
(4) 详细列出根据零极点分析系统特性的过程。
实验代码:
(a)
%零极点图
subplot(3,1,1)
b=[1];
a=[1,0.1];
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1];
a=[1,0.1];
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1];
a=[1,0.1];
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
(b)
%零极点图
subplot(3,1,1)
b=[1];
a=[1,0];
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1];
a=[1,0];
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1];
a=[1,0];
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
(c)
%零极点图
subplot(3,1,1)
b=[1];
a=conv([1,5j],[1,-5j]);
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1];
a=conv([1,5j],[1,-5j]);
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1];
a=conv([1,5j],[1,-5j]);
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
(d)
%零极点图
subplot(3,1,1)
b=[1];
a=conv([1,0.5+5j],[1,0.5-5j]);
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1];
a=conv([1,0.5+5j],[1,0.5-5j]);
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1];
a=conv([1,0.5+5j],[1,0.5-5j]);
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
(e)
%零极点图
subplot(3,1,1)
b=[1,-0.5];
a=conv([1,0.1+5j],[1,0.1-5j]);
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1,-0.5];
a=conv([1,0.1+5j],[1,0.1-5j]);
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1,-0.5];
a=conv([1,0.1+5j],[1,0.1-5j]);
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
(f)
%零极点图
subplot(3,1,1)
b=[1,-0.5];
a=conv([1,-0.1+5j],[1,-0.1-5j]);
z=roots(b);
p=roots(a);
sys=tf(b,a);
pzmap(sys)
%幅频响应
subplot(3,1,2)
b=[1,-0.5];
a=conv([1,-0.1+5j],[1,-0.1-5j]);
[H,w]=freqs(b,a);
plot(w,abs(H));
xlabel('w');
ylabel('幅频响应');
%冲激响应
subplot(3,1,3)
b=[1,-0.5];
a=conv([1,-0.1+5j],[1,-0.1-5j]);
sys=tf(b,a);
t=0:
0.1:
10;
h=impulse(sys,t);
plot(h);
xlabel('t');
ylabel('h(t)')
结果分析:
(a)~(e)均为因果稳定系统,他们的极点都在jw轴左侧。
当且仅当H(s)的全部极点都位于s平面的左半平面时,一个具有有理系统函数H(s)的因果系统才是稳定的。
 升级会员
升级会员 