自动控制原理试题及答案推荐文档.docx
《自动控制原理试题及答案推荐文档.docx》由会员分享,可在线阅读,更多相关《自动控制原理试题及答案推荐文档.docx(47页珍藏版)》请在冰豆网上搜索。
自动控制原理试题及答案推荐文档
自动控制原理
一、简答题:
(合计20分,共4个小题,每题5分)
1.如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面
说明该系统会有什么样的表现?
并解释原因。
2.大多数情况下,为保证系统的稳定性,通常要求开环对数幅频特性曲线在穿越频率处的斜率为多少?
为什么?
3.简要画出二阶系统特征根的位置与响应曲线之间的关系。
4.用根轨迹分别说明,对于典型的二阶系统增加一个开环零点和增加一个开环极点对系统根轨迹走向的影响。
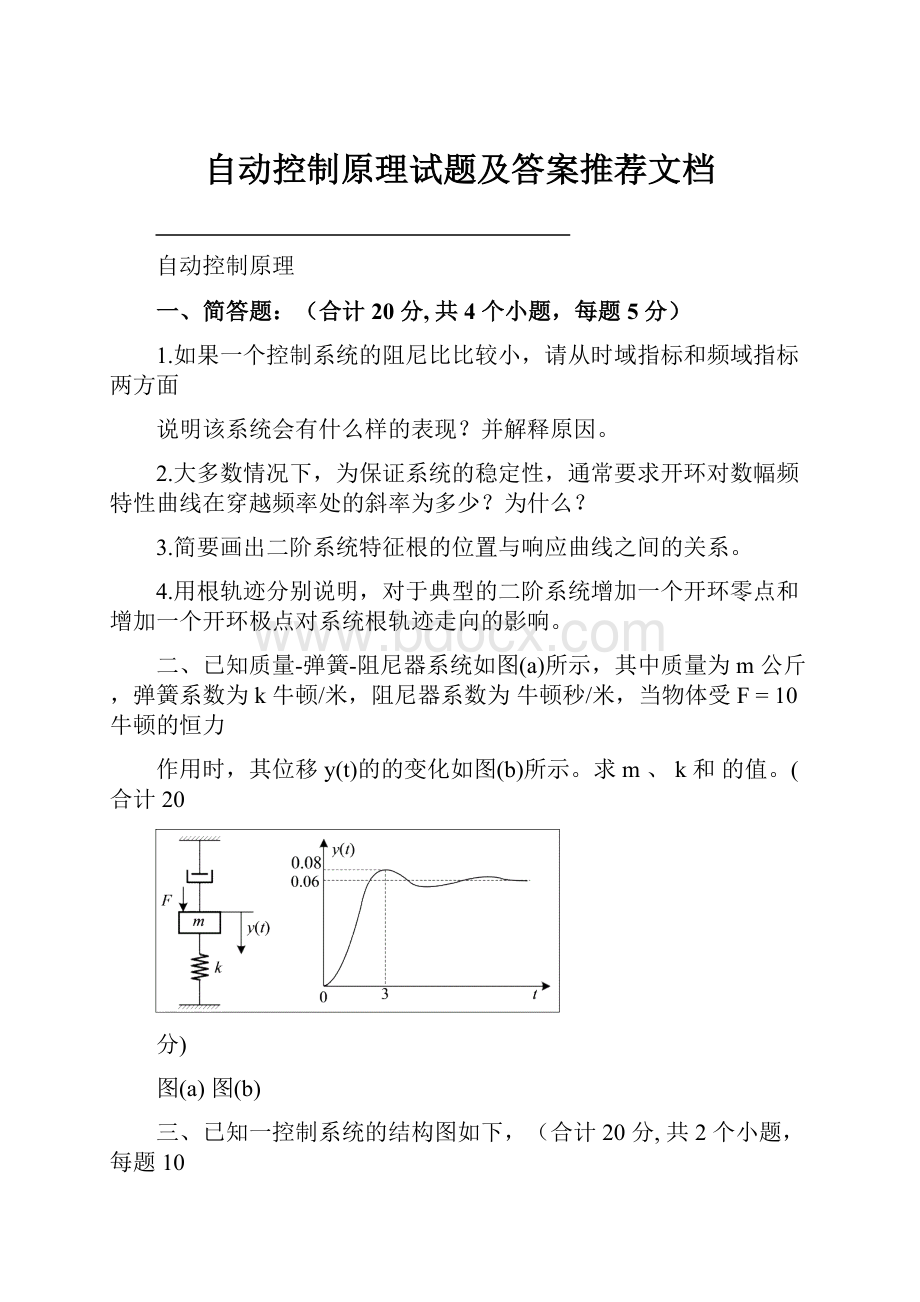
二、已知质量-弹簧-阻尼器系统如图(a)所示,其中质量为m公斤,弹簧系数为k牛顿/米,阻尼器系数为牛顿秒/米,当物体受F=10牛顿的恒力
作用时,其位移y(t)的的变化如图(b)所示。
求m、k和的值。
(合计20
分)
图(a)图(b)
三、已知一控制系统的结构图如下,(合计20分,共2个小题,每题10
分)
1)确定该系统在输入信号r(t)=1(t)下的时域性能指标:
超调量%,
调节时间
和峰值时间tp;
2)当r(t)=2⋅1(t),n(t)=4sin3t时,求系统的稳态误差。
个交接频率的几何中心。
1)计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。
2计算超调量%和调节时间ts。
(合计20分,共2个小题,每题10
分)
五、某火炮指挥系统结构如下图所示,系统
最大输出速度为2r/min,输出位置的容许误差小于2,求:
1)确定满足上述指标的最小K值,计算该K值下的相位裕量和幅值裕量;
2)
Gc(s)=
0.4s+1
0.08s+1
前向通路中串联超前校正网络
,试计算相位裕量。
(合计20分,共2个小题,每题10分)
自动控制原理模拟试题3答案
答案
一、简答题
1.如果二阶控制系统阻尼比小,会影响时域指标中的超调量和频域指标中的相位裕量。
根据超调量和相位裕量的计算公式可以得出结论。
2.斜率为-20dB/十倍频程。
可以保证相位裕量在
3060之间。
3.
4.
二、
□
系统的微分方程为:
my(t)+y(t)+ky(t)=F(t)
系统的传递函数为:
因此
利用拉普拉斯终值定理及图上的稳态值可得:
所以10/k=0.06,从而求得k=066.7N/m
由系统得响应曲线可知,系统得超调量为=0.02/0.06=33.3%,由二阶系统性能指标的计算公式
解得
=0.33
由响应曲线得,峰值时间为3s,所以由
解得
n=1.109rad/s
由系统特征方城
可知
所以
=2nm=2⨯0.33⨯1.109⨯135.5=99.2N/(m/s)
三、
1)系统的开环传递函数为:
系统的闭环传递函数为G(s)=
8
s2+6s+16
比较二阶系统的标准形式G(s)=
2
n
s2+2ns+2n
,可得
n=4
而2n=6,所以=0.75
2)由题意知,该系统是个线性系统,满足叠加原理,故可以分别求取,r(t)=2⋅1(t)和n(t)=4sin3t分别作用于系统时的稳态误
差ess1和ess2,系统的稳态误差就等于ess=ess1+ess2。
A)r(t)=2⋅1(t)单独作用时,
由系统的开环传递函数知,系统的开环增益
Kk=1
,所以系
统对r(t)=2⋅1(t)的稳态误差为:
B)
n(t)=4sin3t
单独作用时,系统的方块图为C
系统的闭环传递函数为:
频率特性为:
当系统作用为
时,=3,所以
We(3j)=
8(j3+4)
=
32+24j
=2.07
6⨯3j+16-32
7+18j
系统的输出为:
所以系统的误差为:
四、
ess=1+8.56sin(3t-0.5564)
解:
1)开环传递函数G(s)H(s)=K(s+1)
s2(0.2s+1)
20lgK-0=-20(lg1-lgc)
K=c=2.236
因为是“II”型系统所以对阶跃信号、斜坡信号的稳态误差为
0;
Ka=2.236
而加速度误差系数为:
因而对单位加速度信号稳态误差为
所以%=0.16+0.4(1
sin
-1)=36%
五、解:
1)系统为I型系统,K=A
ess
=2⨯360/60=6(1/s)2
所以G(s)=6
s(s+1)(s+1)25
可以求得
c=3.5
2)
加入串联校正后,开环传递函数为
2+1
G(s)=
62.5
s(+1)(+1)+1
2512.5
求得c=4.8
单项选择题(16分)(扣分标准>标准:
一空一分)1.根据控制系统元件的特性,控制系统可分为(B)反馈控制系统和前馈控制系统
线性控制系统和非线性控制系统定值控制系统和随动控制系统连续控制系统和离散控制系统2.系统的动态性能包括(C)
A.稳定性、平稳性B.快速性、稳定性C.平稳性、快速性D.稳定性、准确性3.系统的传递函数(C)A.与输入信号有关
B.与输出信号有关
C.完全由系统的结构和参数决定
4.传递函数反映了系统的动态性能,它与下列哪项因素有关?
(C)
A.输入信号B.初始条件C.系统的结构参数D.输入信号和初始条件D.既由系统的结构和参数决定,也与输入信号有关
5.设系统的传递函数为G(S)=,则系统的阻尼比为(A)
A.B.1C.D.6.一阶系统的阶跃响应(D)
A.当时间常数T较大时有超调B.当时间常数T较小时有超调
C.有超调D.无超调7.根轨迹上的点应满足的幅角条件为G(S)H(S)=(D)A.-1B.1
C.(k=0,1,2…)D.(k=0,1,2,…).8.欲改善系统动态性能,一般采用(A)
A.增加附加零点B.增加附加极点C.同时增加附加零、极点D.A、B、C均不行而用其它方法9.伯德图中的低频段反映了系统的(A)
A.稳态性能B.动态性能C.抗高频干扰能力D..以上都不是10.放大环节的频率特性相位移为(B)
A.-180B.0C.90D.-90
11.Ⅱ型系统对数幅频特性的低频段渐近线斜率为(B)
A.-60(dB/dec)B.-40(dB/dec)
C.-20(dB/dec)D.0(dB/dec)
12.常用的比例、积分与微分控制规律的另一种表示方法是(D)
A.PIB.PDC.IDD.PID13.设有一单位反馈控制系统,其开环传递函数为,若要求相位裕量,最为合适的选择是采用(B)
A.滞后校正B.超前校正C.滞后—超前校正D.超前—滞后校正
14.已知离散控制系统结构图如下图1所示,则其输出采样信号的Z变换的表达式
C(z)为(D)
来自www.372中国最大的资料库下载图系统结构图
A.BC.D.
15.零阶保持器是采样系统的基本元件之一,其传递函数,由其频率特性可知,它是一个(B)
A.高通滤波器B.低通滤波器C.带通滤波器D.带阻滤波器
16.非线型系统的稳定性和动态性能与下列哪项因素有关?
(D)
A.输入信号B.初始条件
C.系统的结构、参数D.系统的结构参数和初始条件
二、填空题(16分)(扣分标准:
一空一分)
1.线性控制系统有两个重要特性:
叠加性和齐次性(或均匀性)。
2.对于一个自动控制系统的性能要求可以概括为三个方面:
稳定性
、准确性和快速性。
3.当二阶系统处于过阻尼状态时,其单位阶跃响应无超调。
............
1、建立如下系统的传递函数(其中U0是输出,Ui是输入)
2、方块图(2题)
3、信号流图
4、routh稳定判据(2题)
1)
2)设单位反馈系统的开环传递函数为
Wk(s)=
K
s(1+0.33s)(1+0.107s)
,要求闭环特征根的实部均小于-1,求
K值应取的范围。
5、稳态误差
设有单位反馈系统,如果其开环传递函数为:
1)2)
求输入量为和
6、动态误差
7、根轨迹
时系统的稳态误差。
,画出根轨迹。
1
2
A=26.6
8、判断稳定性
9、画出如下系统的Bode图
1)W(s)=s+0.2
s(s+0.02)
9、写出如下系统的开环传递函数
一、已知系统方框图如图所示,试计算传递函数C1(s)R1(s)、C2(s)R1(s)、
C1(s)R2(s)、C2(s)R2(s)。
(20分)
二、某控制系统的方框图如图所示,欲保证阻尼比=0.7和响应单位斜坡函数的稳态误差为
ess=0.25,试确定系统参数K、。
(15
分)
三、设系统的开环传递函数为
画出根轨迹草图,判断系统的稳定性。
(12
分)
四、设某系统的特征方程式为
求其特征根,并判断系统的稳定性。
(10
分)
一、解:
求得传递函数如下:
(3分)
(3分)
C1(s)=G1(s)G3(s)G4(s)
R2(s)1-G1(s)G2(s)G3(s)G4(s)
(3分)二、解:
(3分)
(2分)
K
s2+(2+Kτ)s
(2分)
(2分)
(2分)
(4分)
综合上面的式子,得
K=31.36,=0.186
(4分)
三、解:
跟轨迹图(略)。
系统为:
不稳定。
四、解:
由Routh稳定判据:
辅助方程是
(4分)
s4+6s2+8=0
解得特征根为s1=2,
s5,6=-1±j
。
(6分)
s2=-2,,
由此可知系统临界稳定。
(2分)
五、解:
(1)该系统的开环传递函数为G(s)H(s)=;
(8分)
(8分)
(2)°。
六、解:
采取超前校正,其传递函数为
(15分)
注:
参数选取并不唯一,但需满足性能指标要求。
七、解:
线性部分的传递函数为
其幅频及相频特性分别为
∠G(j)=-90︒-arctg-arctg(0.50)
(3分)
(3分)
确定特性∠G(j)与负实轴交点坐标
(4分)
特性∠G(j)与负实轴交点同时也在特性-1/N(A)上,
,
其中M=1,解出自振荡振幅为A=20=2.122
03
(5分)
一、简答:
(合计25分,共5个小题,每题5分)1)控制系统的阶次是如何定义的?
答:
系统传递函数特征方程s算子的最高阶次就是控制系统的阶次。
2如何从微分方程求得传递函数?
需满足什么条件?
答:
在零初始条件下,对微分方程用拉普拉斯变换,就可以求得传递函数。
3系统闭环频宽的含义?
答:
闭环对数幅频特性曲线中,-3dB对应的频率,就是系统的闭环频宽。
4简述Nyquist图和Bode图的对应关系。
答:
Nyquist图
负实轴
Bode图
0dB线
0dB线上
0dB线下
-线
5列表阐述0、I、II型系统分别对单位阶跃、斜坡和加速度信号的响应误差。
阶跃
斜坡
加速度
0型
k
0
0
I型
∞
k
0
II型
∞
∞
k
二、改错:
(合计15分,共5个小题,每题3分)
1)II型系统的Bode图幅频特性曲线中,穿越频率和开环增益的值相等;
I型系统不相等
2劳斯稳定判据只能判断线性定常系统的稳定性,不可以判断相对稳定性;
可以
3命题a:
阻尼比决定了超调量的大小。
命题b:
相位裕量决定了超调量的大小。
命题a和命题b是矛盾的。
不矛盾
4闭环传递函数中积分环节的个数决定了系统的类型。
开环
5Mason增益公式适用于线性和非线性定常系统。
线性定常系统
(本题合计25分)
K
已知单位负反馈系统的开环传递函数为
1)绘制该系统的根轨迹;(10分)
2)为保证该系统稳定,试确定K的取值范围;(5分)
若该系统存在二阶闭环主导极点,并该主导极点的阻尼比为0.5,求系统的性能指标。
(10
s=-L±j1-2
nn
012
ts=
5
3)
n
-
-
解:
开环传递函数为:
1)绘制系统根轨迹
起点:
0,-1,-2终点:
无穷远实轴根轨迹:
(-,-2),[-1,0]
渐近线与实轴交点:
-1交角60,180,300
分离点:
-0.423,-1.577(舍去)
与虚轴交点:
s=j代入
得
2)
3)
1,2n
特征根的和
nnn
D(s)=s+3s+2s+2K=(s-s⎡(s+0.5)
3⎣
+0.75
n⎦
n33327
(本题合计35分)
某单位负反馈最小相位系统,其闭环对数幅频特性曲线如图所示,试求:
1系统的闭环传递函数;(5分)
2求系统的开环传递函数并绘制开环Bode图;(10分)
3求该系统的相位裕量,并判断稳定性;(10分)
4如果信号r(t)=sin(2t)作为闭环系统的输入,请写出输出信号y(t)的表达式。
(10分)
解:
1)
2)G(s)=Φ(s)
=10=10/17
1-Φ(s)s(s2+8s+17)
s⎛s2
⎝
2⨯4⎫
17⎪⎭
3)因为是一型系统,所以穿越频率c=10/17=0.5882
所以系统稳定。
4)
Φ(j)=
10=
10
10-82+(17-3)j
(j+1)(j+2)(j+5)
Φ(j)=10
(1-82)2-(17-3)2
∠Φ(j2)=-arctan17-
1-82
=2=40
y(t)=
Φ(j2)si
n(2t+∠Φ(j2))=0.6sin(2t+40)
试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。
(16分)
七、设某二阶非线性系统方框图如图所示,其中
及T=1s,试画出输入信号
r(t)=2⋅1(t)时系统相轨迹的大致图形,设系统原处于静止状态。
(16分)
U0(s)=-R2R3CS+R2+R3Ui(s)R1(R3CS+1)
一、解:
(10分)
二、解:
系统的开环传函为
闭环传函为
(5分)
(1)
(2)
(5分)三、解:
p1=0p2=-1+jp3=-1-j
1)
=0.36n=2.83ess=0.25
(6分)
a=0.25ess=4
(10分)
3)=±2j,kc=4,开环增益临界值为K=2
(5分)
四、解:
列劳斯表如下
s41
-3
2
s31
-1
0
s2-2
2
0
s10
0
0
(4分)
得辅助方程为-2s2+2=0,解得s1=1,
(4分)
s2=-1
最后得s3=-2,
(4分)
s4=1
五:
解:
Bode图如下所示
c=0.75rad/s
。
(10分)
剪切频率为
(5分)
六、解:
由系统方框图求得内环传递函数为:
G(s)
=(s+1)2
1+G(s)H(s)s5+4s4+7s3+4s2+s
5+4s4+7s3+4s2+s=0
(3分)
内环的特征方程:
s
(1分)
由Routh稳定判据:
s4:
1
7
1
s3:
4
4
0
s2:
6
1
s1:
10
0
3
s0:
1
0
(6分)
由此可知,本系统开环传函在S平面的右半部无开环极点,即P=0。
由Nyquist图可知N=2,故
整个闭环系统不稳定,闭环特征方程实部为正的根的个数为
Z=N+P=2。
(5分)
七、解:
根据饱和非线性特性,相平面可分成三个区域,运动方程分别为
(9分)
相轨迹大致图形为
(7分)
2002-2003学年第四学期期末考试题
一、专业班级:
建环00-1,2课程名称:
自动控制原理简答题(本大题20分,每小题5分)
1、常见的建立数学模型的方法有哪几种?
各有什么特点?
2、PD属于什么性质的校正?
它具有什么特点?
3、幅值裕度,相位裕度各是如何定义的?
4、举例说明什么是闭环系统?
它具有什么特点?
二、(10分)
空调房间温度对象的数学模型为:
Tn为回风温度
式中:
TS为送风温度
Tf为干扰换算成送风温度
求传递函数
三、(10分)
系统如图2所示
求:
(1)=
(2)=
四、(15分)
设单位反馈系统的开环传递函数为
若系统以2rad/s频率持续振荡,试确定相应的K和值五、(10分)
理想PID算式为:
试推导出离散PID的增量式算式。
六、(20分)
已知最小相位开环系统的渐进对数幅频特性曲线如图3所示,试:
(1)求取系统的开环传递函数
(2)利用稳定裕度判断系统稳定性
七、(15分)
控制系统方框图如下图所示。
试分析PI控制规律对该系统稳定性能的影响。
2002-2003学年第四学期期末考试题答案
专业班级:
建环00-1,2课程名称:
自
动控制原理第1页共1页
4、既有前项通道,又有反馈通道,输出信号对输入信号有影响。
存在系统稳定性问题。
(例子任意)二、(10分)
TS=0
G(S)=
1
TS+1
G(s)=Y(s)=G(s)G(s)H(s)
2
E(s)1
(s)=C(s)=
R(s)
G1(s)G2(s)
1+G1(s)G2(s)H(s)
三、(10分)
(1)
(2)四、(15分)
五、(10分)
可以利用Routh判据或其它方法解答
六、(20分)
(1)
(2)临界稳定
七、(15分)
R(s)
+
(s)
M(s)
C(s)
-
含PI控制器的I型系统方框图
.
2002-2003学年第四学期期末考试题
专业班级:
建环00-1,2课程名称:
自动控制原理第1页共2页
三、(10分)
空调房间温度对象的数学模型为:
Tn为回风温度
式中:
TS为送风温度
Tf为干扰换算成送风温度
求传递函数
四、(10分)
系统如图2所示
求:
(1)(s)=C(s)=
fF(s)
(2)C(s)=
五、(15分)
设单位反馈系统的开环传递函数为
若要求闭环特征方程的根的实部均小于-1,问K值应取在什么范围?
五、(10分)
理想PID算式为:
P=K(e+1edt+T
de),
P⎰Ddt
试推导出离散PID的位置式算式。
六、(20分)
已知最小相位系统Bode图如图3所示,试求系统传递函数。
图3
七、(15分)
设具有PD控制器的控制系统方框图如下图所示。
试分析PD控制规律对该系统性能的影响。
R(s)
+-
(s)
C(s)
2002-2003学年第四学期期末考试题答案
一、专业班级:
建环00-1,2课程名称:
自动控制原理简答题(本大题20分,每小题5分)
1、a、确定输入输出参数b、列写原始方程
c、消去中间变量
d、整理成标准形式
2、迟后校正,可以消除余差,但降低稳定性
3、[G(jw)H(jw)]平面上的开环频率响应G(jw)H(jw),当w从-∞变到+∞时,按逆时针方向包围点(-1,j0)p次,其中p为开环传递函数G(s)H(s)位于s平面右半部的极点数目。
4、只有前项通道,无反馈通道,输出信号对输入信号无影响。
不存在系统稳定性问题。
(例子任意)。
二、(10分)
Tf=0
G(S)=
1
TS+1
三、(10分)
四、(15分)
5
9
9
可以利用Routh判据或其它方法解答。
五、(10分)
六、(20分)
七、(15分)
解:
1.无PD控制器时
系统的特征方程为Js2+1=0
阻尼比等于零,其输出信号C(t)具有不衰减的等幅振荡形式。
2.加入PD控制器后,
系统的特征方程为:
Js2+Ks+K=0
PP
阻尼比=⨯KP/2J>0
因此系统是闭环稳定的。
Attheend,XiaoBiangivesyouapassage.Minandonces
 升级会员
升级会员 