机器人学导论.docx
《机器人学导论.docx》由会员分享,可在线阅读,更多相关《机器人学导论.docx(10页珍藏版)》请在冰豆网上搜索。
机器人学导论
机器人学导论
机器人学导论作业
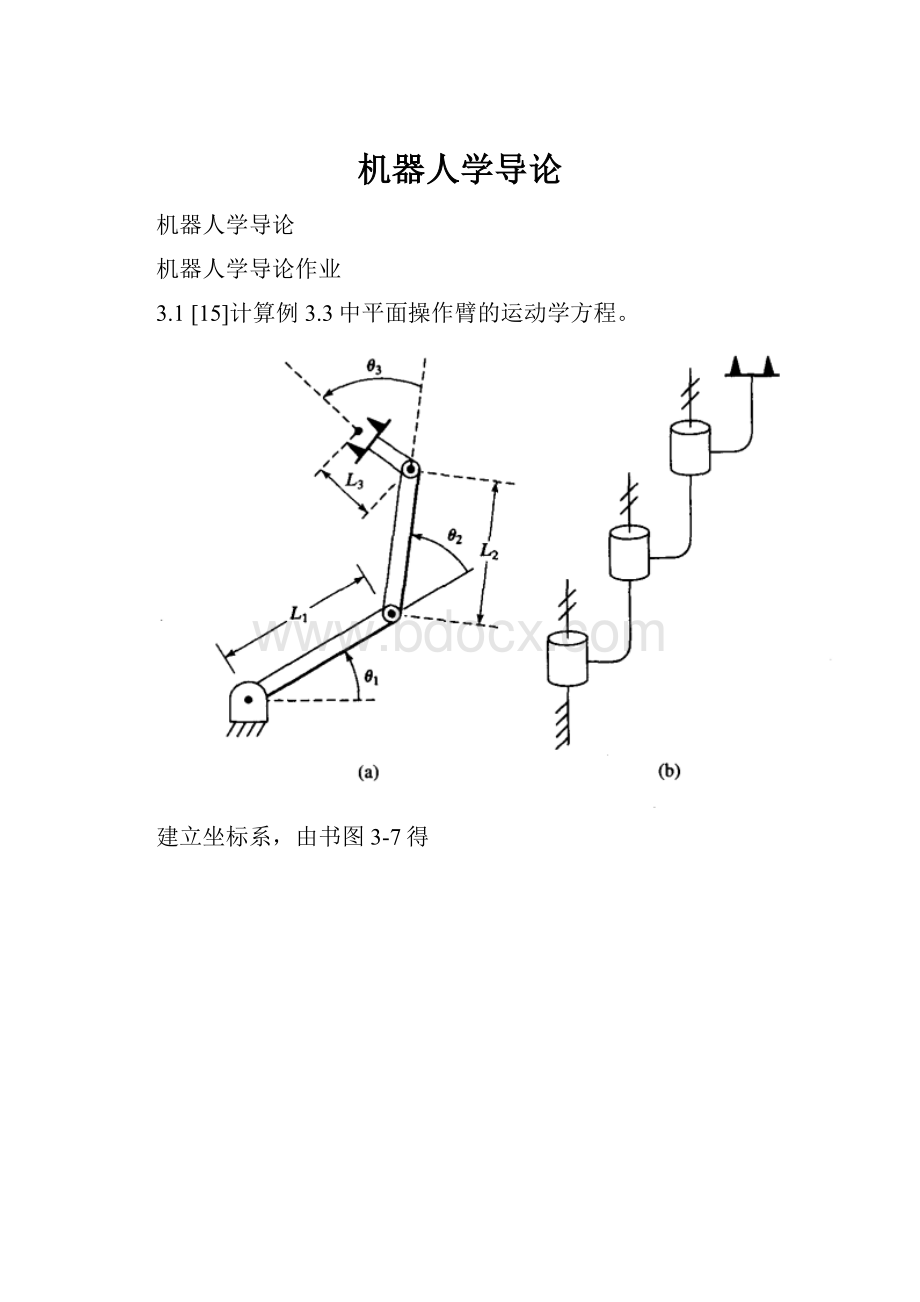
3.1[15]计算例3.3中平面操作臂的运动学方程。
建立坐标系,由书图3-7得
据相应坐标,写出连杆参数表
i
1
0
0
0
2
90
0
0
3
0
0
0
4
0
0
0
根据一般表达式
带入数字得:
3.11[17]图3-33所示为某一机器人腕部的示意图,它有三个相交但不正交的轴。
给出腕部的连杆坐标系(类似于3自由度操作臂),并求连杆参数。
i
1
0
0
0
2
0
0
3
-
0
0
3.13[15]建立图3-34所示的5自由度操作臂的连杆坐标系。
3.15[15]建立图3-35中的3自由度操作臂的连杆坐标系。
3.16[15]建立图3-36中RPR平面机器人的连杆坐标系,并给出连杆参数。
i
1
0
0
0
2
-90°
0
0
3
90°
0
0
3.17[15]建立图3-37中的三连杆机器人的连杆坐标系。
3.18[15]建立图3-38中的三连杆机器人的连杆坐标系。
3.19[15]建立图3-39中的三连杆机器人的连杆坐标系。
3.20[15]建立图3-40中的三连杆机器人的连杆坐标系。
3.21[15]建立图3-41中的三连杆机器人的连杆坐标系。
3.22[18]建立图3-42中P3R机器人的连杆坐标系。
在确定坐标系的布局后,确定d2、d3和a2的符号。
d2为负,d3为正,a2为正
 升级会员
升级会员 