四轴飞行器教案.docx
《四轴飞行器教案.docx》由会员分享,可在线阅读,更多相关《四轴飞行器教案.docx(11页珍藏版)》请在冰豆网上搜索。
四轴飞行器教案
四轴飞行器教案
第一课时:
准备课,四轴飞行器简介
顾名思义,四轴飞行器由四个螺旋桨高速旋转产生升力,为其提供飞行动力。
四个电机转向正反各两个,可以相互抵消反扭矩。
不同于常规固定翼飞机,多旋翼无人机属于静不稳定系统,因此必须依赖于强大的飞控系统才能飞行。
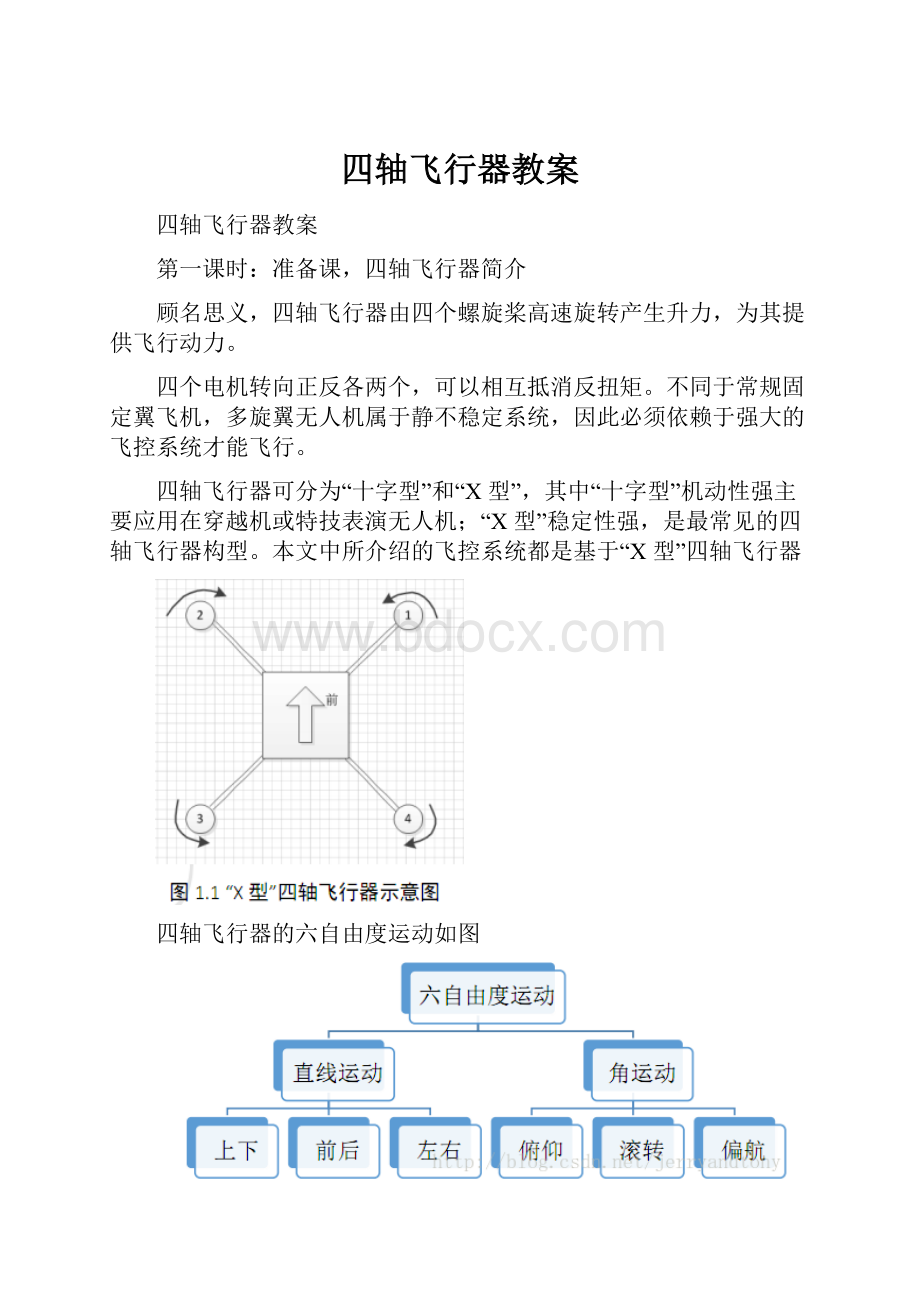
四轴飞行器可分为“十字型”和“X型”,其中“十字型”机动性强主要应用在穿越机或特技表演无人机;“X型”稳定性强,是最常见的四轴飞行器构型。
本文中所介绍的飞控系统都是基于“X型”四轴飞行器
四轴飞行器的六自由度运动如图
1.上下运动
由电机油门控制,油门增大,四个电机转速同时增大,升力增大,则飞机向上运动。
2.前后运动
由飞机的俯仰角控制,如果飞机向前倾斜,则升力在垂线方向分量抵消重力,在水平方向分量提供飞机向前的加速度。
3.左右运动
由飞机的滚转角控制,原理同前后运动。
4.俯仰运动
绕飞机机体坐标系Y轴转动,飞机做低头运动时,1、2号电机转速减小,
同时3、4号电机转速增大,此时四个电机的反扭矩仍然相互抵消。
5.滚转运动
绕飞机机体坐标系X轴转动,原理同俯仰运动。
6.偏航运动
绕飞机机体坐标系Z轴转动,如果1、3号电机转速增大,同时2、4号电机转速减小,此时电机反扭矩便不能相互抵消,会出现顺时针方向的反扭矩,飞机向右偏航。
第二课时:
起飞、垂直上升、悬停、垂直下降
第三课时:
四位悬停
第四课时:
自转一周
第五课时:
垂直矩形
第六课时:
垂直三角形
第七课时:
机头向内盘旋一周
第八课时:
水平8字
第九课时:
十米高度水平直线
第十课时:
45度下降着陆
第十一课时:
迎风直线
第十二课时:
顺风直线
第十三课时:
M字带旋转
第十四课时:
菱形带自转
第十五课时:
圆形带自转
第十六课时:
螺旋上升
第十七课时:
急停着陆
 升级会员
升级会员 