改进的绿色相移全桥控制ICUCC28950.docx
《改进的绿色相移全桥控制ICUCC28950.docx》由会员分享,可在线阅读,更多相关《改进的绿色相移全桥控制ICUCC28950.docx(23页珍藏版)》请在冰豆网上搜索。
改进的绿色相移全桥控制ICUCC28950
改进的绿色相移全桥控制IC—UCC28950
UCC28950是TI公司进一步改进的相移全桥控制IC,它比原有标准型UCC2895主要改进为ZVS能力范围加宽,对二次侧同步整流直接控制,提高了轻载空载转换效率,而且此时可以ON/OFF控制同步整流成为绿色产品。
既可以作电流型控制,也可以作电压型控制。
增加了闭环软启动及使能功能。
低启动电流,逐个周期式限流过流保护,开关频率可达1MHz。
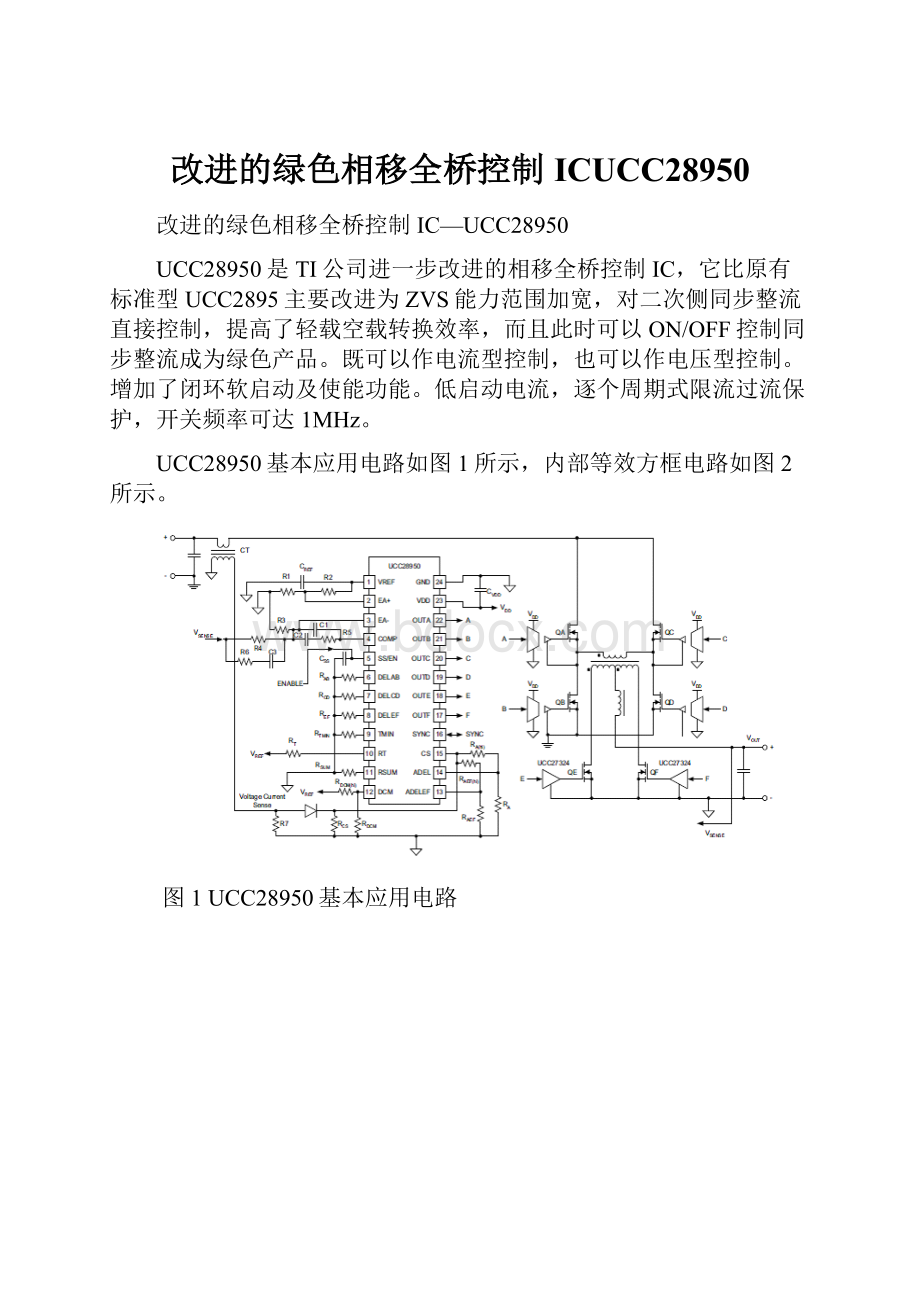
UCC28950基本应用电路如图1所示,内部等效方框电路如图2所示。
图1UCC28950基本应用电路
图2UCC28950内部电路方框图
*启动中的保护逻辑
UCC28950启动前应该首先满足下列条件:
*VDD电压要超过UVLO阈值,7.3V。
*5V基准电压已经实现。
*芯片结温低于140℃。
*软启动电容上的电压不低于0.55V。
如果满足上述条件,一个内部使能信号EN将产生出来,开始软启动过程。
软启动期间的占空比,由SS端电压定义,且不会低于由TMIN设置的占空比,或由逐个周期电流限制电路决定的负载条件。
*电压基准
精确的(±1.5%)5V基准电压,具有短路保护,支持内部电路,并能提供20mA外部输出电流,其用于设置DC-DC变换器参数,放置一个低ESR,ESL瓷介电容(1uF-2.2uF)旁路去耦,从此端接到GND,并紧靠IC端子,以获得最佳性能。
唯一的关断特性发生在IC的VDD进入UVLO状态。
*误差放大器(EA+,EA-,COMP)
误差放大器有两个未提交的输入端,EA+和EA-。
它具有3MHz带宽,具有柔性的闭环反馈环。
EA+为同相端,EA-为反向端。
COMP为输出端,输入电压共模范围保证在0.5V-3.6V。
误差放大器的输出在内部接到PWM比较器的同相输入端,误差放大器的输出范围为0.25V-4.25V,远超出PWM比较器输入上斜信号范围,其从0.8V-2.8V。
软启动信号作为附加的误差放大器的同相输入,当误差放大器的两个同相输入为低,是支配性的输入,而且设置的占空比是误差放大器输出信号与内部斜波相比较后放在PWM比较器的输入处。
*软启动和使能(SS/EN)
软启动端SS/EN是一个多功能端子,有以下几个用处:
*用循序渐进地增加占空比完成软启动的闭环,它从TMIN设置的最小占空比向上稳定地加大占空比,直到输出电压所需要的占空比。
*在过流状态下,逐个周期地设置打嗝模式条件。
*变换器的ON/OFF控制。
在软启动中,SS/EN或EA+端的电压之一,无论谁为低电平,给闭环反馈系统设置基准电压,SS/EN和EA+两个信号都是误差放大器的同相输入,COMP是其输出。
于是软启动总是在闭环反馈环以下,由在COMP端的电压设置占空比,占空比由COMP电压定义,且不能短过由用户设置的TMIN脉冲。
当然,如果短的占空比由限流电路设置,则它会变得优于由COMP端电压或TMIN时钟设置的占空比。
软启动期间系由在SS/EN端与GND之间连接的外部电容CSS设置。
内部充电电流典型为25uA,在外部将软启动端控制到0.55V以下,将关闭控制器,释放软启动端即使能控制器的启动。
如果没有限流条件,加到输出电感的占空比迅速增加,直到达到稳定状态的占空比。
它由变换器稳压值决定。
在SS/EN端电压超出EA+的0.55V电压时即达到。
这样应对软启动的时间TSS,CSS值由下式计算得出:
(1)
(2)
例如,如果软启动时间TSS选择10ms,VN1为2.5V,计算出软启动电容CSS等于84nF,选择一个82nF的电容。
*空载下节省功耗的模式
UCC28950提供四个不同的轻载管理技术,用于改善宽负载范围下功率变换器的功率。
1.合适的延迟
*ADEL它设置并最佳化死区时间,去在一个很宽的范围内控制初级侧开关。
*ADELEF,它设置并最佳化死区时间,去控制初次级开关的间隔。
2.TMIN设置最小占空比的大小,如同没有电流限制的模式。
3.在DCM模式下,动态同步整流器的ON/OFF控制。
为了增加轻载的
效率,在CS端电压低于用户设置的阈值时的DCM状态,在DCM模式,同步输出驱动信号OUTE和OUTF即关断。
4.猝发模式,为了最高的轻载或空载下的效率,猝发工作模式为数个PWMTMIN脉冲工作之后随之关断。
猝发模式的时间,由用户定下的TMIN时段设置。
*自适应延迟(OUTA和OUTB,OUTC和OUTD)
从DELAB端和DELAB到地的电阻RAB,从CSS端到ADEL端的电阻分压器RAH1,从ADEL端到GND的RA设置了TABSET,OUTA和OUTB之间的延迟时间。
也包含了高到低电平及低到高电平。
这个延迟其为CS信号功能逐渐增加,在VCS=1.8V下测量,为TABSET1,到在2.0V下测量为TABSET2,这个做法可以确保高低边MOS之间没有短路电流。
为了使ZVS工作在宽的负载范围下工作,做到最佳状态。
它仅仅取决于电阻分压器RAN1和RA。
最长最短延迟之间的合适比例被设置好了,最大比值由CS和ADEL端一起设置实现。
如果ADEL接到GND,则延迟时间就固定了,仅由从DELAB到GND的电阻RAB决定。
延迟TCDSET1和TCDSET2的设置及达到OUTC和OUTD的作为非常像刚刚描述的OUTA和OUTB,差别仅在电阻RCD是接到DELCD和GND之间来设置TCDSET2。
OUTD和OUTC的延迟要与OUTA和OUTB相同,都由ADEL端的电压决定。
延迟时间TABSET由(3)式给出
(3)
同样,延迟时间TCDSET2由(4)式给出
(4)
在此公式内,RAB和RCD为KΩ,CS电压为伏特,KA范围为从0-1的系数。
延迟时间TABSET和TCDSET2为ns,这些公式是经验的,从测量数据中推出。
这样,就不必绝对按公式计算。
一个实例,设RAB=15KΩ,CS1v,KA=0.5,这样TABSET为90.25ns,从(3),(4)式中KA相同,且为:
(5)
KA设置怎样延迟是凭检测CS电压变化的,如果KA=0,延迟为固定。
如果KA=1,延迟最大是在CS=0.2V,并且在向1.8V升上时确保延迟减小,最大最小延迟之比为6:
1。
推荐由设置KA=0和设置TABSET和TCDSET2相对较大,这样可以防止开关通过短路电流。
OUTA,OUTB以及OUTC,OUTD之间的延迟由电阻RAB和RCD相应地设置。
在轻载时调节最佳延迟,然后用改变KA设置OUTA,OUTB在最大电流时的最佳延迟。
对OUTC和OUTD时相同,通常C,D总是ZVS状态。
RA和RAH1确定了CS端加到ADEL端的部分电压,KA确定了取决于CS电压的有效延迟,KA从0变化,此处ADEL端短路到GND,延迟不取决于CS电压。
变到1,ADEL绑到CS,设置KA,RAB和RCD,提供能在初级开关整个负载范围内保持最佳ZVS条件。
因为CS上的电压包括反射到初级侧通过电流检测电路的负载电流。
图4和图5示出由CS电压和KA的功能设置的延迟,它们的条件分别为:
RAB=RCD=13KΩ(图4),RAB=RCD=90KΩ(图5)。
图4延迟时间的设置RAB=RCD=13K图5延迟时间的设置RAB=RCD=90K
*自适应延迟(OUTA和OUTF,OUTB和OUTE)
从DELEF端到GND的电阻REF与从CS到ADELEF端的电阻分压器RAEFHI一起加上从ADELEF端到GND的电阻RAEF设置相同的OUTA和OUTB之间的延迟时间TAFSET和TBESET到低,以及相关的OUTF或OUTE到低电平,如图6。
图6OUTA和OUTF,OUTB和OUTE之间的差别
这些延迟作为CS信号从TAFSET1的函数逐渐增加,它是在VCS=0.2V下测量的。
TAFSET2是在VCS=1.8V下测量的。
DELAB和DELCD的行为却相反,TAFSET2这个延迟是最长的,此时在CS端信号最大,TAFSET1此时最短。
这将在很宽的负载电流范围内减小同步整流MOSFET的体二极管的导通时间,从而改善效率,减少体二极管反向恢复时间。
最长和最短延迟之间的比例设置只取决于电阻分压器RAEFHI和RAEF。
如果CS和ADELEF绑在一起,比值会最大化。
如果ADELEF接到GND,则延迟是固定的,仅由从DELEF到GND的电阻REF决定。
延迟时间TAFSET由下面(6)式给出,同样定义TBESET。
(6)
在此式中,REF以KΩ计,CS端电压以伏特计,KEF为CS电压从0~1的数值,延迟时间TAFSET为nS,此式的经验值相近。
作为计算实例,假设REF=15KΩ,CS=1V,KEF=0.5。
则TAFSET为41.7nS,KEF为:
(7)
RAEF和RAEFHI确定出CS端加到ADELEF电压的大小,KEF确定决定于CS电压的延迟时间,KEF变化从0(ADELET到GND)到1。
(ADELEF绑在CS端上)。
图7图8示出延迟时间随CS电压和KEF在REF=13KΩ和90KΩ时的变化曲线。
图7延迟时间的设置RAB=RCD=13K图8延迟时间的设置RAB=RCD=90K
*最小脉冲(TMIN)
从TMIN端到GND的电阻RTMIN设置固定的最小脉冲TMIN加到输出整流器,使初级开关在轻载时也能做到ZVS开关。
如果输出PWM脉冲受命于反馈环时比TMIN更短,则控制器进入猝发模式工作。
此处,甚至几个TMIN脉冲跟随关断时间,其由反馈环主宰。
合适地选择TMIN阶段由下面时间决定。
上升沿时功率变压器要有中够的励磁电流才能保持ZVS状态,最小脉冲TMIN由(8)式定义。
(8)
RTMIN为KΩ,TMIN为nS。
相关曲线示于图9。
最小占空比的值DMIN由(9)式给出。
(9)
此处,FSW(OSC)为KHZ振荡器频率。
TMIN为最小脉冲nS,DMIN为百分比。
图9最小时段与设置电阻的关系曲线图10开关频率和电阻RT的关系
*猝发工作模式
如果变换器的占空比低于TMIN,则进入猝发工作模式,控制器将给出一个或两个功率传递周期的脉冲。
如果控制器给出一个功率传输周期到OUTB和OUTC,它即停止。
如果开始给出的功率到OUTA和OUTD,则它再给出一个功率传输到OUTB和OUTC,然后再停止。
控制器总是停止在OUTB和OUTC的功率传输周期处。
如果控制器仍需要一个占空比少于TMIN,则控制器进入关断模式,然后它等待,直到变换器需要一个等于或高于TMIN的占空比,此前控制器提出的TMIN或一个PWM占空比系由COMP电压决定。
*开关频率设置(RT)
在RT和VREF端之间接一支电阻RT来设置固定的工作频率,同时令此控制器作主控方,同时提供同步脉冲从SYNC端送出,其具有0.5占空比。
频率等于内部振荡器。
为设置从属变换器工作模式,接一支电阻RT,从RT端到GND,并且放一支825KΩ电阻在SS端到GND,并联在SS-EN电容上。
这个结构令控制器工作于从属状态。
如果两控制器SYNC端接在一起,从属控制器相对主控制器有90度相位移动。
控制器开关频率等于输出脉冲的频率。
公式(10)定义主动控制器的正常开关频率。
在UCC28950中,为内部时钟振荡器频率,它是控制器输出频率的两倍。
(10)
在此式中,RT为KΩ,VREF为伏特V,FSW(NOM)为KHZ,这是一个经验的近似值,这不是唯一的协议。
实例:
VREF=5V,RT=65KΩ,则开关频率FSW(NOM)为92.6KHZ。
式(11)定义出变换器的正常频率,如果变换器处于从属变换器状态,而电阻RT接于RT端到GND之间。
(11)
此式中,RT为KΩ,FSW(NOM)为KHZ,注意VREF=5V,(10)式(11)式是相同的结果。
图10示出FSW(NOM)与电阻RT值在VREF=5V时的关系,从(10)式(11)式,开关频率FSW(NOM)设置为相同值频率时需要相同的RT电阻值。
*斜率补偿(RSUM)
斜率补偿技术是用加入一个附加斜波信号到CS端,还要加到下面
·PWM比较器的输入端,此为峰值电流型工作。
·逐个周期限流比较器的输入端。
这是用来防止在占空比大于50%时发生次谐波振荡,在低占空比时和轻载之下,斜率补偿斜波减小峰值电流模式工作时的噪声感染。
过多的斜率补偿斜波会减小PCM控制效果,在逐个周期限流情况,
平均电流限制变低,这样可以减小大的输出电容时的起动能力。
最佳的补偿斜率改变取决于占空比,LO和LM。
需要斜率补偿系为控制器工作在峰值电流模式控制,或在逐个周期限流且占空比在50%以上时。
从RSUM到GND放置一个电阻,允许控制器工作在峰值电流控制模式。
从RSUM接一支电阻到VREF,开关控制器进入电压型控制,且具有内部的PWM斜波。
当然,电阻值仍要提供CS信号作逐个周期限流用。
换句话说,在VMC电压模式控制下,斜率补偿仅加到逐个周期比较器,在PCM峰值电流模式,斜率补偿加到PWM和逐个周期电流限制比较器两处。
斜率补偿电路的工作逻辑示于图11。
图11斜率补偿电路的工作逻辑
附加斜波的斜率me加到CS信号系用从RSUM到GND放置一支电阻,me由(12)式给出。
(12)
如果电阻从RSUM端接到VREF端,控制器工作在电压控制型。
仍旧要斜率补偿加到CS信号用于逐个周期限流,在此情况斜率由(13)式给出:
(13)
在(12)式和(13)式中,VREF为伏特V,RSUM为KΩ,me为V/µs。
相对me作为RSUM的函数。
如图12所示,因为VREF=5V,所以从(12),(13)式得到的结果重合了。
图12增加的斜波斜率与电阻RSUM的关系图13占空比随负载电流的变化
图14DCM功能方框图
*动态SRON/OFF控制(DCM模式)
在DCM端的电压由电阻分压器Rdcmhi提供,它接于VREF端和DCM之间,Rdcm则接于DCM端到GND。
设置2V限流阈值给电流检测端,如果CS端电压降到DCM端以下,控制器进入轻载节省功耗模式。
关断同步整流器OUTE和OUTF。
如果CS端电压高于DCM端,则控制器运行在所有条件下都工作在CCM模式。
DCM功能方框图如图14。
这里是一个20µA开关电流源,用于建立一个滞后功能,电流源激活仅在系统进入DCM模式。
否则它是无效的,而且不会影响结点电压。
因此,当在DCM区域,DCM阈值是由(14)式给出的电压分压器加一个△V。
当开始CCM区域,阈值电压由电阻分压器设置,此时CS达到设置在DCM端的阈值,系统等待去看两个连续下降沿的PWM周期,此前开关从CCM到DCM。
反之亦然,滞后的幅度是外部电阻分压器阻抗的函数,滞后可以用(14)式计算。
(14)
DCM必须使用,此为防止输出电感电流返转,这会导致同步整流的MOSFET失效。
*电流检测
从电流检测端来的信号用于逐个周期式电流限制,峰值电流模式控制,轻载效率管理以及设置各输出OUTA,OUTB,OUTC,OUTD的延迟时间,还有设置OUTE和OUTF的延迟时间,接一只电流检测电阻于CS和GND之间,这还取决于PCB布局,为防止潜在的电噪声干扰,推荐一个小的RC滤波器接于RCS电阻和CS端之间。
*逐个周期式电流限制,过流保护和打呃工作模式
当负载电流超出其预先设定值时,逐个周期式限流给初级侧提供峰值电流限制。
对于峰值电流模式控制,需要一些前沿消隐时间去防止控制器受开关噪声假的触发。
为了节省外部RC滤波器的消隐时间,提供一个内部30nS滤波器放在CS输入端。
整个从CS端到输出的延迟TCS是100nS,如果功率级需要更长的消隐时间,仍旧需要一个外部RC滤波器。
2.0V±3%的逐个周期电流限制阈值对有效电流互感器检测是最好方式。
在变换器工作在逐个周期式限流期间,取决于软起动电容的值以及怎样服务于过流条件,这用于在IC内部SS端放电电流IDS来实现。
(15)
(16)
软起动电容值还取决于打呃模式下关断时间大小,先前变换器在不同模式下的工作,用相关的软起动电容充放电电流表示的图示于图17。
图17软起动时电压VSS的时间顺序
当占空比接近0时,最大放电电流为20µA,这个电流设置最短的工作时间。
此时逐个电流限制期间限制时间如下式:
(17)
(18)
这样,如果软起动电容CSS=100nF,则TCL(ON)将是5mS。
重新起动以前计算打呃关断时间TCL(OFF),给出如(19)(20)式:
(19)
(20)
用100nF相同的软起动电容在重新起动前的关断时间是122mS。
注意:
起动时如果过流条件在软起动电容电压达到3.7V阈值以前发生,控制器限制电流,但软起动电容继续充电。
随着其达到3.7V阈值,软起动电压迅速由内部1KΩ的RDS(ON)开关上拉到4.65V阈值。
由于软起动电容放电,逐个周期限流在起动时段开始了。
取决于专门设计的需要,用户可以不考滤去除故障参数,用加入外部充放电电流到软起动电容,整个逐个周期限流以及打呃式工作示于图17。
在此例中,逐个周期电流限制最终大约5mS,随后关断时间大约122mS。
很像过流条件,如果上拉电阻接到SS和VREF之间的打呃模式,具有能不顾由用户重新起动,如果提供的上拉电流超过2.5µA,控制器仍旧留在闩锁状态。
在此情况下,一个外部软起动电容值可以用附加的上拉电流进行计算,如果软起动电容强制放电到0.55V以下,或VDD电压低于UVLO阈值,闩锁模式也可以在内部复位。
*外同步
UCC28950允许变换器工作在外同步模式,将全部SYNC端接在一起,并设好主动及从动即可,作为主动的控制器提供同步脉冲于SYNC端,其频率等于2倍变换器频率FSW(NOM)及0.5的占空比。
作为从动的控制器不产生同步脉冲,从动控制器控制自身时钟到同步脉冲信号的下降沿,于是与主动控制器频率FSW(NOM)比较产生90℃相位移动。
因为从动控制器是同步到SYNC脉冲的下降沿,因此,从动控制器工作在主动控制器的180℃的延迟处。
如果变换器的输入输出是捆在一起的话,这样主动从动之间提供了输入电容和输出电容最大的纹波对消效果。
为了防止系统在几个变换器同步工作时出现问题,以下几点必须注意:
·如果变换器接成从动的同步频率必须大于或等于1.8的倍变换器频率。
·从动变换器没有起动,直到至少收到一个同步脉冲后才起动。
·如果任何一个或所有变换器都接成从动,在收到至少一个同步脉冲后,则每一个变换器都工作在自身频率下。
于是,这是一个在从动变换器中的同步中断。
然后控制器用自己内部的时钟脉冲保持工作,其频率由RT决定。
·在主动模式下SYNC脉冲在SS端通过0.55V使能阈值开始发出。
·从动开始产生SS/EN电压,甚至通过没有收到的同步脉冲。
·推荐主动控制器SS端在从动控制器的SS端之前先起动。
因此,主动控制器的SS/EN端必须在从动变换器起动工作之前达到它的使能阈值电压。
在相同结点,推荐主动和从动的Tmin电阻设置在同一阻值上。
*输出端(OUTA,OUTB,OUTC,OUTD,OUTE,OUTF)
·全部MOSFET控制输出有0.2A的驱动能力。
·控制输出设计成P-MOS和N-MOS的图腾柱结构,其RDS(ON)约为20Ω和10Ω。
·控制输出能力为充电100PF在12nS内,放电在8nS内。
·输出控制脉冲的幅度为VDD。
·控制输出设计用来和外部MOSFET/IGBT驱动器相匹配。
·设计最佳化防止锁在输出的上部,由外部测试来验证。
图20UCC28950的功率级电路
UCC28950在相移全桥功率级,输出OUTA,OUTB为主动驱动,而OUTC和OUTD为被动驱动,典型时序图如图21。
OUTE和OUTF为最佳化的驱动同步整流器的MOSFET(图20),这些输出有200mA峰值电流能力,能驱动外部的MOSFET/IGBT驱动器,推荐负载电容不超过100PF,幅度等于VDD电压。
图21相移控制器的主要波形
*VDD供电电压
此端外接电源电压从8V~17V范围,放高质量低ESR,ESL至少1µF瓷介电容作旁路电容CVDD从此端到GND,推荐用一支10Ω电阻从RC滤波器串到VDD端。
*接地(GND)
所有信号都参照GND结点,推荐设置一个模拟地接点和一个功率地接点。
模拟地包括VREF,EA+,EA-,COMP,SS/EN,DELAB,DELCD,DELEF,TMIN,RT,RSUM。
功率地包括DCM,ADELEF,ADEL,CS,SYNC,OUTF,OUTE,OUTD,OUTC,OUTB,OUTA以及VDD。
实例接法如图22。
图22UCC28950控制IC的接地布局示意图
应用信息
*UCC28950应用描述
全桥移相DC/DC变换器采用UCC28950控制加入同步整流技术可以实现效率的大幅度改善。
新的控制方法可以在整个负载范围内实现ZVS条件。
初次级之间精确的自适应的控制信号时序以及特有的轻载工作模式得到了最高转换效率,节省功耗。
该变换器简化电路示于图21。
控制器器件位于二次侧,虽然位于初级侧更好,但是位于二次侧允许很容易地达到通讯系统水平,而且能更好地掌控一些瞬态条件,可以直接驱动同步整流的MOSFET,功率级包括初级侧的MOSFET:
QA,QB,QC,QD和二次侧的同步整流MOSFET:
QE和QF。
例如,12V输出的变换器用于服务器系统供电时,采用中心抽头整流器和L-C输出滤波器是通用的选择。
为了保持在不同输出功率下的高效率,在中载和满载下变换器工作在正常同步整流模式,而在轻载时及猝发模式下用MOSFET的体二极管整流。
此时输出功率变得非常低,所有这些传输都是基于初级侧的电流检测,检测采用电流互感器将信号送至二次侧。
移相全桥变换器在正常工作模式下主要波形示于图21,图中上面六个波形为控制器的输出驱动信号。
正常模式下OUTE和OUTF在开关周期的部分有重叠,此时两个同步整流MOSFET都导通,而功率变压器二次侧为短路状态,电流IPR是通过功率变压器初级线圈的电流,四个波形的底部展示的是整流MOSFET的源漏电压VDS-QE和VDS-QF,在输出电感上的电压VLOUT,通过电感的电流ILOUT。
初级开关和同步整流MOSFET之间合适的时段为临界状态,此系为了实现最高的转换效率以及在此模式下可靠地工作,控制器器件调节整流器MOSFET的关断时间随负载变化,并确保最小的体二极管导通时间和反向恢复损耗。
ZVS是高输入电压变换器减少开关损耗的重要特色,用功率开关内部寄生电容和变压器漏感结合在一起实现。
控制器在整个负载电流范围内确保ZVS条件。
其采用根据负载变化调节同一腿部初级MOSFET开关之间的延迟时间的方法。
控制器还限制最小的导通时间脉冲,轻载时加到变压器上的方法,允许其储存足够的能量于漏感中作到ZVS传输。
随着负载电流从中等负载下降到空载条件,控制器选择最有效的节能方法,将控制器从正常工作模式转变到断续电流二极管整流模式,终于在非常轻载和空载条件下进入猝发工作模式,这些模式以相关的输出信号OUTE,OTUF示于图23。
图23在不同工作模式转换时的工作波形
轻载下,防止反方向电流流过同步整流MOSFET和输出电感是必要的。
在并联工作期间一些瞬态条件下,这个反向电流会在输入电压源和负载之间导致一些额外能量的循环。
因此造成损耗增加效率降低。
另一个负面作用是失去ZVS的工作条件,推荐控制结构防止
 升级会员
升级会员 