数码镜头设计原理.docx
《数码镜头设计原理.docx》由会员分享,可在线阅读,更多相关《数码镜头设计原理.docx(20页珍藏版)》请在冰豆网上搜索。
数码镜头设计原理
数码镜头设计原理
第一节分辩率问题_数码镜头鉴别率与面阵CCD象素的匹配
尽管这个问题资料介召较多,但绝大多数是范范而谈,没有接触实质,如雾里看花一般不能令人信服。
可是它却是数码光学产品的重要环结,不能等闲视之。
为澄清疑惑,特从基本概念上加以介召,希望对大家有所帮助。
1数码镜头鉴别率概念
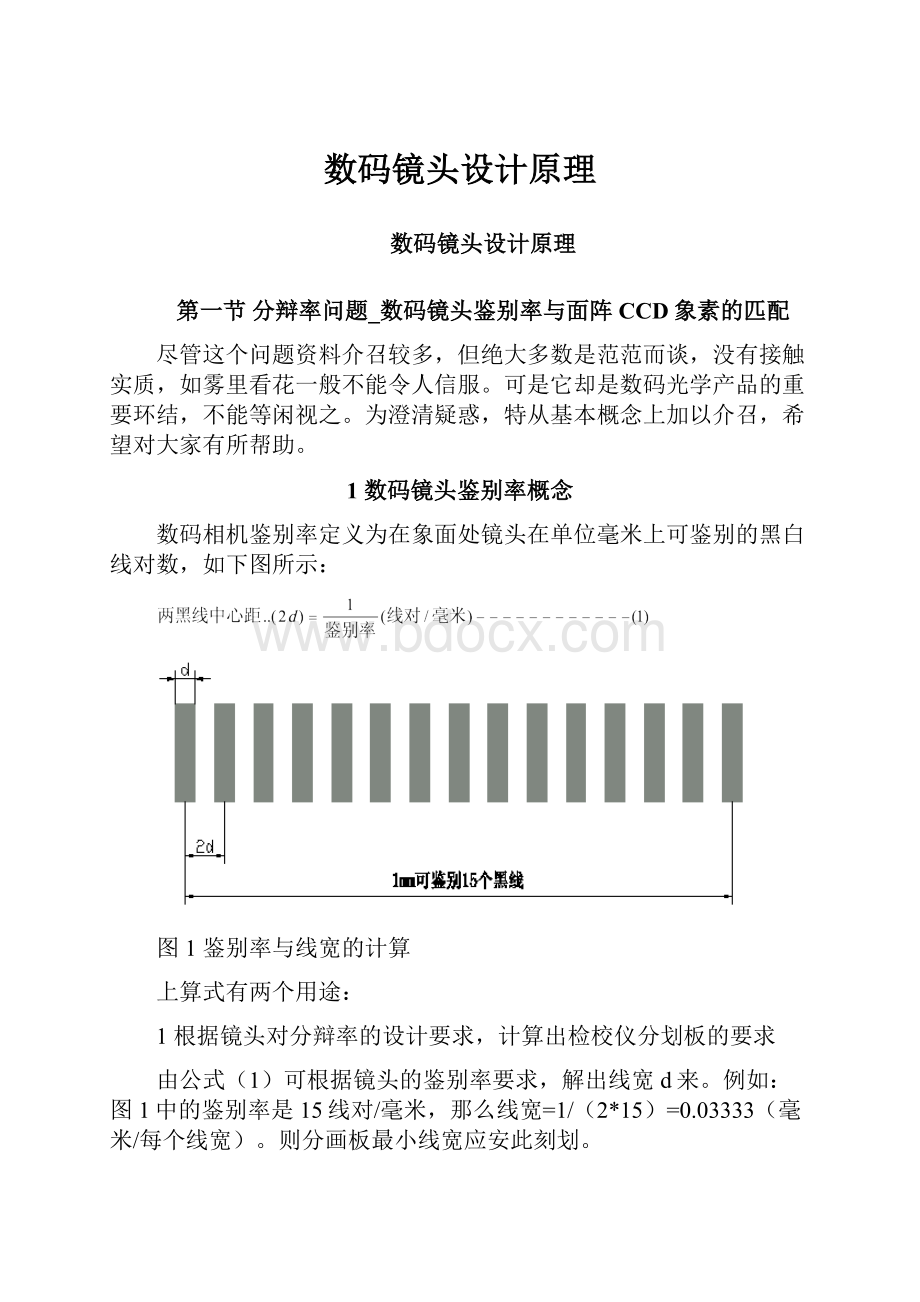
数码相机鉴别率定义为在象面处镜头在单位毫米上可鉴别的黑白线对数,如下图所示:
图1鉴别率与线宽的计算
上算式有两个用途:
1根据镜头对分辩率的设计要求,计算出检校仪分划板的要求
由公式
(1)可根据镜头的鉴别率要求,解出线宽d来。
例如:
图1中的鉴别率是15线对/毫米,那么线宽=1/(2*15)=0.03333(毫米/每个线宽)。
则分画板最小线宽应安此刻划。
2在仿型设计中,根据检校仪上可分辩的线条宽度,提出设计镜头的分辩率要求
只需将
(1)式变换成鉴别率用分划最小间隔表示的函数式进行计算,即可得到镜头设计时鉴别率应达到值。
注意:
上两条都是对所涉计到的镜头,在其象方成象面上对分辩率的计算。
如果所知数据不在成象面上,一定要转换计算到象面后,才能用
(1)式处理。
2CCD分辩率
CCD的分辩率是用象素总数表示的。
设在水平方向上CCD感光有效长度是M毫米,在垂直方向上CCD感光有效长度是N毫米。
如果象素(最小感光单元称之为象素)的尺寸是m2*n2,那么在水平方向上的象素总数=M/m2,在垂直方向上的象素总数=N/n2,最后可用下式算出CCD的整个感光面上的象素总数:
3数码镜头分辩率与CCD分辩率的匹配
在水平方向上数码镜头对线状分辩率图案的成象,其每个线宽恰好站用一个象素,我们就称在水平方向上选用的CCD与数码镜头在分辩率上是相配的;在垂直方向上也可同样理解之。
这样定义保正了CCD在最少象素总数下,恰好能分辩清象的细节。
可见这种定义是合理的。
看图2,就可理解相配的含义,也可用以数码镜头对CCD象素总数要求的计算。
图2CCD象素总数计算(最小方格为一最小感光单元:
8象素)
由图2和
(2)式可计算出图中CCD的象素总数:
设CCD的M=1mm,N=1mm。
镜头象方分辩力=15线对/毫米,现计算其象素总数如下:
由
(1)式有:
d=1/(2*镜头象方分辩力)=1/30=0.03333(毫米/每黑白线对)
可见与该镜头相配的CCD最小感光单元象素尺寸m2*n2=0.03333*0.03333毫米
由
(2)式有:
CCD象素总数=1/(0.03333)*1/(0.03333)=900象素
如果镜头鉴别率是150线对/毫米,CCD感光面M=4.8mm,N=3.6mm。
由
(1)式有:
d=1/(2*镜头象方分辩力)=1/300=0.003333(毫米/每黑白线对)
由
(2)式有:
CCD象素总数=4.8/(0.003333)*3.6/(0.003333)=1920000象素。
这就是说分辩率是150线对/毫米的镜头,可配1/3英寸200万象素的CCD。
由上面的计算可知,为使摄象头与CCD相配,需知道CCD的感光面尺寸,由“CCD应用技术”一书的168页表8-3有各种规格的CCD感光面尺寸如下表1
表1CCD感光面尺寸
1英寸
2/3英寸
1/2英寸
1/3英寸
1/4英寸
12.8*9.6
8.8*6.6
6.4*4.8
4.8*3.6
3.6*2.7
由表1就可查出各种规格的CCD感光面尺寸:
M和N值。
4CCD最小象素单元尺寸
在上面我们计算了150线对/毫米鉴别率的镜头,它可匹配200万象素的CCD。
实际上由于最小感光单元受工艺水平的限制,一般情况下(指有较大规模经济情况下)是很难制出0.003尺寸的CCD来,因此应根据工艺允许的CCD最小感光单元尺寸计算相配的镜头分辩率。
现在市场上1/3英寸的CCD最多也只达到150万象素。
为了给工艺加工和装配上留有余地,150万象素的CCD配200万象素的镜头还是合适的。
我们测绘了南函的一个镜头,中心鉴别率是600线对/毫米,0.7视场的是150线对/毫米。
那么这个镜头与CCD相配其鉴别率应算多少呢?
这个问题可以这样考率:
0.7视场以内是主要成象区,应以在此区间内镜头能达到的最低鉴别率为准来评价该镜头的鉴别率。
注意:
由于CCD分辩率的限制,光电系统对视场中心也只能达到150万象素的水平,反算镜头在视场中心的有效鉴别率也只能达到120线对/毫米(估算)。
这就是说,中心视场镜头鉴别率没有必要太高,太高了CCD也分辩不清。
一般中心视场是0.7视场的1.5倍就可以了。
这与胶片为接收器的情况是不同的(胶片的分辩率比镜头的分辩率高很多,不能过多牺牲中心视场的鉴别率以获得提高0.7视常场的校正潜力)。
由上面知道CCD的感光单元的最小尺寸受到工艺的限制,1/3英寸的CCD其真实鉴别率(在最小象元间用软件插值的方法获得的高象素水平,并不能提高整个光电系统分辩物体细节的能力。
这个道理与数码变焦不能提高系统分辩本领的道理是一样的。
插值增加象素的作法有它一定的极积一面,当数码影象放大时,不会出现码赛克现象,图象图素间有光滑的过度,使象看起来揉合)只能到150万的水平,1/3英寸的数码象机标榜200万以上的象素水平,多数是采用了软件插值,除非采用了昂贵的CCD芯片。
为了获的更多的图象细节方面的信息,需增多CCD象元总数,只能统过增大CCD尺寸来达到。
例如选1/2英寸或2/3英寸的CCD。
第二节视场问题
1CCD有效光接收面的对角线
在第一节的3中曾介召过各种规格CCD的尺寸如下:
表2CCD感光面尺寸和对角线尺寸
项目
1英寸
2/3英寸
1/2英寸
1/3英寸
1/4英寸
CCD的尺寸
12.8*9.6
8.8*6.6
6.4*4.8
4.8*3.6
3.6*2.7
对角线尺寸
16
11
8
6
4.5
2CCD全视场角计算
有了CCD有校光接受面尺寸和数码镜头焦距后,就可用(3)式计算数码镜头全视场角。
由mathematica4算式有:
解出全视场角是
实际上象差设计到80度就可以了,多出的视场可用多种方法去除,如用软件的方法去除。
由上计算可知当焦距小于4mm,,视场角要求大于80度时(短焦广角的清况),所采用的CCD是1/4英寸的。
上面介召了数码镜头视场角与CCD感光面的匹配问题,可作为镜头设计或选用CCD的参考。
3各种规格CCD的最大分辩力
现在以1/3英寸的CCD可分辩150万象素为例,来计算CCD最小象元尺寸如下。
现将(2)式抄录如下:
则有1500000=4.8/(m2)*3.6/(N2)M2*N2=0.00001152
设CCD最小感光单元为正方形,有:
CCD最小感光单元边长=M2=N2=N=0.0034mm.
当其为0.004时,对应分辩力为(用2式算):
100万。
从计算结果看,1/3英寸的CCD作到150万象素水平,最小感光单元线尺寸只有0.0034mm ,这在工艺上是很难的。
而100万象素则是可能的。
所以说当CCD分辩率超出100万时,就应选1/3以上尺寸的CCD,例如:
1/2英寸的CCD。
当然也可用软件插值增加象素总数,但感光单元总数并不会增多,即镜头的真实鉴别率不会增加。
最好是以0.004mm的CCD最小感光单元边长尺寸,用(2)式计算1/4~1英寸的CCD最大分辩率,作为选用CCD和设计镜头的参考:
表3各种规格的CCD最大有效象素总数
项目
1英寸
2/3英寸
1/2英寸
1/3英寸
1/4英寸
CCD的尺寸
12.8*9.6
8.8*6.6
6.4*4.8
4.8*3.6
3.6*2.7
对角线尺寸
16
11
8
6
4.5
最大有效象素总数(万)
700
350
200
100
50
上表最大有效象素总数是以最小感光单元边长尺寸取0.004mm时计算的。
现以1/4为例进行计算,其他情况可仿此计算。
(这是mathematica4算式,可直接粘贴到该软件中进行计算,只需改变m,n值就可计算出以上各种情况。
)
说明:
1英寸的情况很少用,其它情况在选用CCD时,不应超出上表给定的最大有效象素总数,镜头分辩率也应匹配。
为了在各种情况下,镜头与CCD匹配,它应能分辩0.004mm线宽,由(1)式:
即所设计镜头在0.7视场以内不低于120线对/毫米的分辩率,才能达到与CCD的匹配,当然这是指所选的CCD其分辩力达到工艺极限时的情况。
4CCD 镜头与36mm镜头系列视场关系
CCD镜头的接受面尺寸设为M*N,对角线尺寸则为:
L=SQR(M^2+N^2),对物镜中心张角W=2*atg[L/(2*f’)]。
当CCD镜头的全视场角W与36mm镜头系列全视场角α相等时,其拍摄的视场效果是一样的。
我们称此时CCD镜头与135镜头相当。
已知135镜头接受器为胶片,其尺寸为:
24*36,对角线尺寸为:
l=SQR(24^2+36^2)=43.27,对物镜中心张角α=2*atg(21.64/f’)。
下面列出最长用的1/3英寸CCD镜头与36mm镜头同视场下的焦距对应关系:
镜头类型
36mm镜头系列
1/3英寸CCD镜头
焦距范围
视场角范围
焦距范围
视场角范围
广角镜头
F’<38
2W>
59.3°
F’<7.027
2W>
59.3°
标准镜头
F‘=38→61
2W=59.3°→39°
F’=7.027→11.3
2W=59.3°→39°
远摄镜头
F’=61→135
2W=
39°→18.2°
F’=11.3→25
2W=
39°→18.2°
超远摄镜头
F‘>135
2W<
18.2°
F‘>25
2W<
18.2°
根据镜头类别的定义,CCD镜头用于相机时焦距的系列值选择如下:
广角:
F’≤6mm,标准:
8mm,,10mm,12mm,摄远:
F’≥16mm
5CCD镜头与36mm镜头系列鉴别率关系
现在看看CCD镜头与36mm镜头系列鉴别率关系。
下面是36mm镜头系列鉴别率等级表
镜头类别
镜头级别
视场
中心
边缘
广角镜头f’<38
J0
40
25
JI
36
26
JII
32
36
JIII
28
12
标准镜头f’=38→61
J0
41
20
JI
36
18
JII
32
14
JIII
28
11
远摄镜头61J0
36
25
JI
32
22
JII
28
16
JIII
25
12
超远摄镜头f’>135
J0
32
25
JI
28
22
JII
25
16
JIII
22
12
如果CCD镜头要达到36mm镜头系列同样的分辩效果,那么当CCD镜头的成象放大到36mm镜头系列成象尺寸时,应有相同的分辩率。
现以上表中心最差的鉴别率情况,来计算CCD镜头达到同等象质时的分辩率要求:
36mm镜头系列中心鉴别率为22ln/mm时,其最小感光单元分辩率方向上线尺寸为:
1/(2*22)=0.02273mm,在CCD镜头象面上要达到同样成象质量(指象面放大到35mm镜头系列成象水平),则其最小象元线尺寸=0.02273*4.8/36=0.00303mm,对应镜头分辩率=1/2*0.00303=165ln/mm。
6 数码镜头和所选CCD的参数匹配实例
上面是由网上下载的一组实例。
由上例可见在短焦超广角的时候,并没有选1/4英寸的CCD。
而是选了1/3英寸的CCD。
这样作没有什么不可以的,最多是全视场没有包络全整个CCD感光面,超出视场的部分可以用其它方法处理。
如用软件限制其有效视窗的大小。
第三节光谱与亮度问题
解决这个问题,要有CCD的光谱灵敏度和白光积分灵敏度数据。
我在网上找到了一篇介召CCD性能较好的文件,由于篇幅限制,只能摘录如下。
由上资料可见,为了使CCD从光学系统中采集更多的能量,应使光学系统透过光的能量,其峰值在650纳米处。
我们测过杭照所的一个镜头,有个滤波片是透黄绿光的。
说明了其透光峰值点选在650纳米处。
由上资料可见,CCD的白光积分灵敏度的包容量是很大的。
其线性区要求照度在100Lx以内。
当CCD用于计量时,应注意在线性区使用它。
另外还可据此提出光电接口的能量转换数据。
为了能进一步了解CCD的一些性能,特将资料中有关部分摘录如下:
CCD的主要参量
1)转移效率η和损耗率ε
电荷包从一个势阱向另一个势阱中转移,不是立即的和全部的,而是有一个过程。
为了描述电荷包转移的不完全性,引入转移效率的概念。
在一定的时钟脉冲驱动下,设电荷包的原电量为Q0,转移到下一个势阱时电荷包的电量为Q1,则转移效率η定义为
η=Q1/Q0
ε表示残留于原势阱中的电量与原电量之比,故
ε=1-η
如果线阵列CCD共有n个极板,则总效率为ηn。
引起电荷包转移不完全的主要原因是表面态对电子的俘获和时钟频率过高,所以表面沟道CCD在使用时,为了减少损耗,提高转移效率,常采用偏置电荷技术,即在接收信息电荷之前,就先给每个势阱都输入一定量的背景电荷,使表面态填满。
这样,即使是零信息,势阱中也有一定量的电荷。
因此,也称这种技术为“胖零(fatzero)”技术。
另外,体内沟道CCD采取体内沟道的传输形式,有效避免了表面态俘获,提高了转移效率和速度。
2)时钟频率的上、下限
CCD是利用极板下半导体表面势阱的变化来储存和转移信息电荷的,所以它必须工作于非热平衡态。
时钟频率过低,热生载流子就会混入到信息电荷包中去而引起失真,时钟频率过高,电荷包来不及完全转移,势阱形状就变了,这样,残留于原势阱中的电荷就必然多,损耗率就必然大。
因此,使用时,对时种频率的上、下限要有一个大致的估计。
(a)时钟频率的下限f下
f下决定于非平衡载流子的平均寿命τ,一般为毫秒量级。
电荷包在相邻两电极之间的转移时间t,应小于τ,对于三相CCD,电荷包从前一个势阱转移到后一个势阱所需的时间为T/3,所以
f下>1/3τ
对于二相CCD,
f下>1/2τ
(b)时钟频率的上限f上
f上决定于电荷包转移的损耗率ε,就是说,电荷包的转移要有足够的时间,电荷包转移所需的时间应使之小于所允许的值。
时钟频率上限f上可作如下估算,设τD为CCD势阱中电量因热扩散作用衰减的时间常数,与材料和极板的结构有关,一般为10-8s级。
若使ε不大于要求的ε0值,则对于三相CCD有
f上≤-1/(3τDlnε0)
对于二相CCD有
f上≤-1/(2τDlnε0)
3)光谱特性 (见上)
第四节仿形设计问题__设计思路
仿形设计是光路设计中最行之有效的方法。
在10年前,绝大多数的光学镜头都可在各种镜头专利中找到相近的样例。
在此基础上就可以通过缩放,自动设计找到最终解。
但现在随着科学技术的发展,镜头已向超小型,高象质的情况演变。
口径,尤其是视场的加大,焦距的超短焦化,使得光学镜头的设计变的更复杂。
加上市场竟争的激烈化,使可借助的资料越来越少。
就是用三级象差理论进行设计引导,也因为透镜厚度相对焦距过大(焦距超段焦化引起的),使建立在薄透镜基础上的初级象差的引导设计变的面目全非了。
更有甚者,既使想进行三级象差的初始设计,由于资料奇缺,使设计无从下手。
针对种种困难,迫使人们现在多从仿型设计入手来解决光路设计问题。
现在仿形设计的重要方法之一,就是测绘样机,找出光学设计的近似解,再导以自动设计来完成。
应该还有一种方法,就是对从网上查到的不完整资料出发(由于保密的原因),进行近似解的寻找。
网上所给的个人设计成功的资料,往往只给了光学结构的图形,典型光线走向图形(用国外大型软件设计的成果多以这种方式给出),而没有半径,间格,材料等数据。
能否有办法找出来,答案是肯定的。
尽管这种方法有点不入流,但抓住老鼠就是好猫,我就在此谈谈自己的看法(下步将安此思路编程来解决这一辣手问题)。
手机数码相机镜头可说是现在最关心的问题,下面就是从某网站下载的样例图:
MTF:
1光学系统外形尺寸的近似确定
看了这个图,大家一定很感兴趣。
想只从上面这点信息就找出近似解,真有点天方夜谈,我就“天方夜谈一下吧”。
首先将第一图粘到AutoCAD中,然后将其描出(在视窗放得很大时,描绘精度是很高的)。
描绘好后测一下边缘最薄的正透镜的边厚,中心最薄的负透的中心厚。
对光学系统图进行缩放,缩放后的正透镜边厚,负透镜中心厚都应略大于工艺加工所允许的厚度。
这时光学系统的各几何尺寸就已得到了。
现在看看这个确定几何尺寸的方法,再结合光路自动设计中的缩放原理,大家就一定明白了,就这么简单。
2D光者射率的确定
要解决这个问题,看起来无从下手,其实并不难。
只需编一个小程序就可以解决了。
编程原理如下:
这理有4个透镜,每个透镜在现有玻璃中取全各种可能值。
为了使计算快速,并不一定非从玻璃库中查找,而是给一个折射率范维进行计算。
具体说就是:
n1=1.41~2.0,n2=1.41~2.0,n3=1.41~2.0,n4=1.41~2.0
循环计算所有可能的玻璃组合下的系统象距和D光最大口径球差值,给定公差,在公差内的输出玻璃组合。
这样的计算要进行多少次呢?
设每层循环步长为0.01(这个步长初选玻璃已经够了),那么需进行60的4次方,即1300万次。
所以这一步选玻璃必需每个循环的计算内容越少越好。
因此只计算象距和D光最大口径球差值,而且不查玻璃库。
为了使程序有广范的适应性,可设循环层数为20。
在这个循环内,大概需近几个小时的计算量。
3根据1的输出,自动从玻璃库中选出适合的组合
现在给出从玻璃库中选玻璃时,玻璃库中材料的D光折射率与组合循环给定的折射率的偏差允许值,小于的玻璃材料组合输出。
这个操作可编个小程序解决。
4色光选玻璃
上面没有考虑色光的问题。
根据色差要求,在3中所选出的玻璃库中进行所有玻璃的组合循环,计算系统的色差,小于允许值的玻理组合输出。
5慧差选玻璃
在4中输出的玻璃组合中,进行慧差计算,小于给定公差的输出。
6至此玻璃组合就有几种。
全面计算象差,从中选出可做为自动设计的初始结构。
看了以上介召,应该相信这个方法是可行的。
这个方法如果只看到这方面的应用,真是太小看它了。
实际上在测绘仿型设计中也可大展拳脚。
测绘仿型时,可测出透镜的外形尺寸,焦截距。
故可反算出D光折射率,我们把反算的D光折射率做为上面2的输出,就可接着往下进行仿型设计了。
以上所述的仿型设计程序准备在近期开发出来,到时请同行指教。
第五节仿形设计问题__光学系统外形尺寸的近似确定
现在以第四节的手机样例做为“光学系统外形尺寸的近似确定”的实例。
先将下图粘到AutoCAD中,在里面进行缩放操作。
缩放操作时注意两点:
1上图是以位图的方式载入的,在其上描绘图形时应在不同的UCS座标系中进行。
以防多次视窗缩放切换进行描绘时,所描图形被位图遮盖(在同一UCS座标系中会出现这种情况)。
如何使位图和失量图不在同一座标系呢?
只需用UCS命令的O选项(座标原点设值选项),使位图与失量图处于原点X,Y同,Z(失量图的Z值大于位图的Z值,只有这样才能保正在府视图观察时,先看到失量图,后看到位图,即位图不可能遮盖失量图)不同的两个原点中即可。
2当图描好后,如何确定线性缩放率呢?
看看手机图,正透镜应选第一块,因为它边厚最薄。
负透镜只有一块,就是它了。
本着上述原则在AutoCAD绘好的图如下:
上图可以自己画一下,看看结果相差多少,方法掌握好了,不应相差太多。
另外这里召的方法是找自动设计的最初解,只要最初解合理就可以了。
这点应该没问题的。
细心的人会问这里没有物方入瞳和视场。
在循环给出材料各色光折射率后,如何通过计算象差来选玻璃呢?
这就是下面要谈的第3个问题。
3物方入瞳与视场的确定
(1)在AutoCAD完成图中量出系统象距,作为象方截距(应为手机可近似看成对无穷远成象,其象距即为象方截距)。
(2)量出象高。
(3)先正光路给玻璃D光折射率循环,计算系统截距。
(4)由于输出符合截距偏差要求的是一个范围,应从中选出偏差最小的作为结果,这时各透镜D光材料的近似折射率都有了(3位有效数据)。
(5)反光路计算(这时物高,光束投射角,物距都是已知的),可得到象方出射光束口径,视场角。
这就是正光路进行象差计算所需的入瞳值与物方视场角。
(6)在象差计算时,为了编程的方便,也为了加快计算速度,只设置了入瞳在物空间的情况。
为此应用作图法解出等效入瞳的位置和大小。
以上(6)条在D光折射率的确定一节中将作详细介召。
 升级会员
升级会员 