中北大学自动控制课程设计.docx
《中北大学自动控制课程设计.docx》由会员分享,可在线阅读,更多相关《中北大学自动控制课程设计.docx(16页珍藏版)》请在冰豆网上搜索。
中北大学自动控制课程设计
中北大学
自动控制课程设计
学生姓名:
学号:
学院:
信息与通信工程学院
专业:
自动化专业
题目:
自动控制课程设计
指导教师:
林都职称:
教授
2013年9月6日
自动控制原理综合实验题目
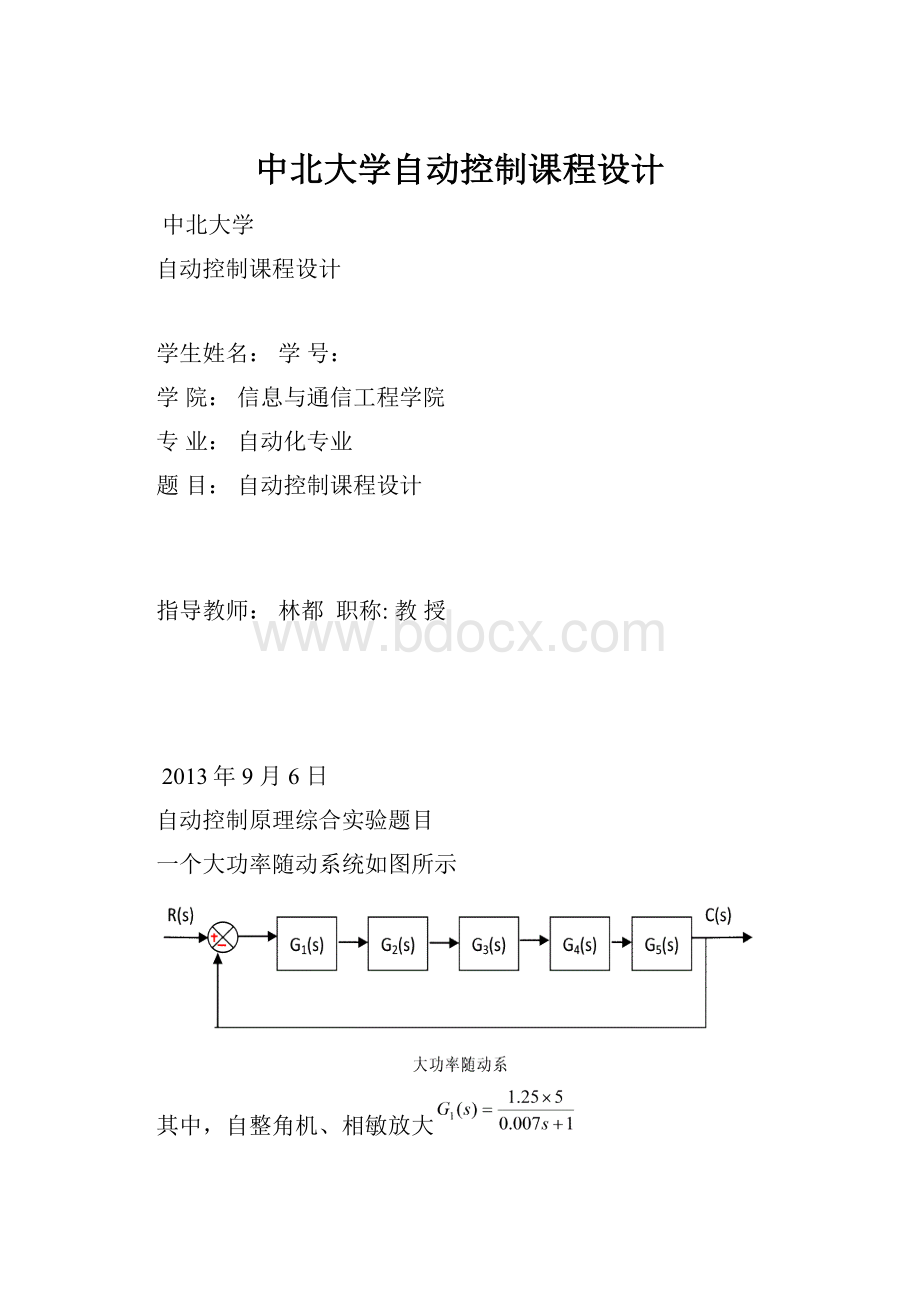
一个大功率随动系统如图所示
其中,自整角机、相敏放大
,可控硅功率放大
,执行电机
,拖动系统
,减速器
。
1、画出未校正系统的Bode图,分析系统是否稳定;
2、对系统进行串联校正,要求校正后的系统满足指标:
(1)超调量<10%,
(2)调整时间<3s,(3)相角稳定裕度>60deg,(4)幅值稳定裕度>15dB;
3、计算校正后系统的剪切频率cp和穿频率cs;
4、给出校正装置的传递函数;
5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析;
6、分别画出系统校正前、后的的根轨迹图;
7、应用所学的知识分析校正器对系统性能的影响。
设计内容
本次课程设计采用MATLAB软件进行设计,通过对程序的调试与计算设计出理想的控制系统。
具体设计如下:
系统未校正系统的伯得图:
matlab程序源代码:
sys=tf(6.25,[0.0071]);
sys1=tf(40,[0.001671]);
sys2=tf(23.98,[0.00630.91]);
sys3=tf(1,[0.91]);
sys4=tf(0.1,[10]);
figure
(1);
margin(sys*sys1*sys2*sys3*sys4);holdon
figure
(2);
closys1=sys*sys1*sys2*sys3*sys4/
(1+sys*sys1*sys2*sys3*sys4);
step(closys1);
figure(3)
GH=sys*sys1*sys2*sys3*sys4
nyquist(GH)
figure(4);
rlocus(closys1)
分析,相角稳定裕度为pm=-84;wc=9.01rad/s;系统不稳定
系统未校正的奈奎斯特图
放大后的奈奎斯特图
起始点为从-90度方向开始,所以绕{-1,j0}点为2,由p=0,r=-2,所以z=p-2r=4,所以系统不稳定
未校正系统阶跃响应的曲线图
未校正系统根轨迹图
对系统进行串联校正
1.采用超前校正装置
运用matlab中的m函数,函数源代码如下:
numo=599.5;%定义校正前系统
deno=conv(conv(conv(conv([0.007,1],[0.00167,1]),[0.0063,0.9,1]),[0.9,1]),[1,0]);
[Gm1,Pm1,Wcg1,Wcp1]=margin(numo,deno);%校正前系统幅值域度相角域度
r0=60;r=-84;%期望的相角域度和之前的相角域度
w=logspace(-1,4);%频率变化范围
[mag1,phase1]=bode(numo,deno,w);%求校正前的幅值相位
forepsilon=5:
15%定义附加相角变化范围
phic=(r0-r+epsilon)*pi/180;%求需增加的超前相角
alpha=(1-sin(phic))/(1+sin(phic));%求alpha
[i1,ii]=min(abs(mag1-sqrt(alpha)));%将校正前系统幅值等于-20lg(a)^
wc=w(ii);%(1/2)的频率作为校正后的wc
T=1/(wc*sqrt(alpha));%求校正装置参数T
numc=[T,1];denc=[alpha*T,1];%定义校正装置的传函
[num,den]=series(numo,deno,numc,denc);%求校正后的传函
[Gm,Pm,Wcg,Wcp]=margin(num,den);%求校正后的幅值域度相角域度
if(Pm>=r0);break;end%判断是否满足要求
end
printsys(numc,denc)%显示校正装置传函
[mag2,phase2]=bode(numc,denc,w);%求校正装置的幅值相角
[mag,phase]=bode(num,den,w);%求校正后的幅值相角
subplot(2,1,1);
semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),'-.');
grid;
ylabel('幅值(db)');
title('绿-校正前红-校正蓝-校正后');
subplot(2,1,2);
semilogx(w,phase,w,phase1,'--',w,phase2,'-.',w,(w-180-w),':
');
grid;
ylabel('相角(度)');xlabel('频率(rad/sec)');
disp(['校正后:
幅值穿越频率=',num2str(Wcp),'rad/sec,','相角穿越频率=',num2str(Wcg),'rad/sec']);
disp(['校正后;幅值裕度=',num2str(20*log10(Gm)),'dB,','相角裕量=',num2str(Pm),'du'])
运行该m函数的如下结果:
num/den=
0.13245s+1
--------------
0.062563s+1
校正后:
幅值穿越频率=10.1182rad/sec,相角穿越频率=1.1886rad/sec
校正后;幅值裕度=-47.5471dB,相角裕量=-65.5848du
不满足题目要求,所以在超前校正的基础上再进行一滞后后校正。
明显不满足题目要求。
2.采用串联滞后装置
校正m文件源代码如下:
numo=599.5*[0.13245,1];deno=conv(conv(conv(conv(conv([0.007,1],[0.00167,1]),[0.0063,0.9,1]),[0.9,1]),[1,0]),[0.062563,1]);
[Gm1,Pm1,Wcg1,Wcp1]=margin(numo,deno);%校正前系统幅值域度相角域度
r0=149;r=-84;%期望的相角域度和之前的相角域度
w=logspace(-1,4);
[mag1,phase1]=bode(numo,deno,w);
forepsilon=5:
15
r=(-180+r0+epsilon);
[i1,ii]=min(abs(phase1-r));
wc=w(ii);%将校正前的系统相角等于(-180+r+e)
%时的频率作为校正后系统的wc`
beta=mag1(ii);%求校正装置的参数beta和T
T=5/wc;
numc=[T,1];denc=[beta*T,1];%定义校正装置传函
[num,den]=series(numo,deno,numc,denc);%求校正后传函
[Gm,Pm,Wcg,Wcp]=margin(num,den);%求系统校正后的幅值域度和相角域度
if(Pm>=r0);break;end;
end
printsys(numc,denc)
[mag2,phase2]=bode(numc,denc,w);
[mag,phase]=bode(num,den,w);
subplot(2,1,1);
semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),'-.');
grid;
ylabel('幅值(db)');
title('绿-校正前红-校正蓝-校正后');
subplot(2,1,2);
semilogx(w,phase,w,phase1,'--',w,phase2,'-.',w,(w-180-w),':
');
grid;
ylabel('相角(度)');xlabel('频率(rad/sec)');
disp(['校正后:
幅值穿越频率=',num2str(Wcp),'rad/sec,','相角穿越频率=',num2str(Wcg),'rad/sec']);
disp(['校正后;幅值裕度=',num2str(20*log10(Gm)),'dB,','相角裕量=',num2str(Pm),'du']);
运行如上的m函数,得到以下信息:
num/den=
50s+1
-----------------
297380.3017s+1
校正后:
幅值穿越频率=0.10188rad/sec,相角穿越频率=1.167rad/sec
校正后;幅值裕度=27.6136dB,相角裕量=68.7745du满足题目要求。
计算校正后系统的剪切频率cp和穿频率cs;
如上图可知,校正后剪切频率为0.10188rad/s,-π穿频率为1.167rad/s。
校正装置的传递函数:
50s+1
Gc(s)=----------------
297380.3017s+1
校正前后的奈奎斯特图。
校正前:
sys=tf(6.25,[0.0071]);
sys1=tf(40,[0.001671]);
sys2=tf(23.98,[0.00630.91]);
sys3=tf(1,[0.91]);
sys4=tf(0.1,[10]);
GH=sys*sys1*sys2*sys3*sys4
nyquist(GH)
校正后:
sys=tf(6.25,[0.0071]);
sys1=tf(40,[0.001671]);
sys2=tf(23.98,[0.00630.91]);
sys3=tf(1,[0.91]);
sys4=tf(0.1,[10]);
sys5=tf([501],[297380.30171])
GH1=sys*sys1*sys2*sys3*sys4*sys5
nyquist(GH1)
奶奎斯特判据:
绘制w从0到+无穷大时的开环幅相曲线,然后按其包围(-1,j0)点的圈数R(逆时钟为正,顺时针为负)和开环传函在s右半平面上的极点数P,根据公式Z=P-2R,来确定,Z=0,系统稳定;否则,系统不稳定。
由于右平面无极点,而且R=0;得出Z=0;所以闭环系统稳定。
六:
分别画出系统校正前、后的的根轨迹图;
校正前:
sys=tf(6.25,[0.0071]);
sys1=tf(40,[0.001671]);
sys2=tf(23.98,[0.00630.91]);
sys3=tf(1,[0.91]);
sys4=tf(0.1,[10]);
closys1=sys*sys1*sys2*sys3*sys4/
(1+sys*sys1*sys2*sys3*sys4);
rlocus(closys1);
校正后:
sys=tf(6.25,[0.0071]);
sys1=tf(40,[0.001671]);
sys2=tf(23.98,[0.00630.91]);
sys3=tf(1,[0.91]);
sys4=tf(0.1,[10]);
sys5=tf([501],[297380.30171]);
closys2=sys*sys1*sys2*sys3*sys4*sys5/
(1+sys*sys1*sys2*sys3*sys4*sys5);
rlocus(closys2);
七.应用所学的知识分析校正器对系统性能的影响。
通过绘制伯德图可以发现,本题目的幅值裕度和相角裕度都很低,且系统不稳定,所以开始应尝试使用串联超前校正超前校正利用其超前校正相位特性,获得系统所需的超前相位量,故可以改善系统稳定裕度,而超前改变稳定裕量较小,有时要采取两次超前校正。
经过串联超前校正可以发现仍不满足要求,所以在原来的基础上继续使用滞后校正,滞后校正后符合题目要求,滞后校正是其的高频衰减特性,使幅值穿越频率下降,从而提高相位裕度。
可以降低高频噪音。
滞后-超前校正使其超前部分来增加系统的相角裕度,同时其滞后部分来改善系统的稳定裕度。
通过本次课程设计使我初步了解所学知识在实际应用的应用,受益匪浅,今后在实习中要多接触这类知识,继续充实完善自己。
 升级会员
升级会员 