摄像机成像几何.docx
《摄像机成像几何.docx》由会员分享,可在线阅读,更多相关《摄像机成像几何.docx(20页珍藏版)》请在冰豆网上搜索。
摄像机成像几何
9.
9・1成像几何
基本模型
Oc是摄像机中(光)心
Zc是摄像机主(光)轴#IIOc・“ll是摄像机焦距
基本成像几何模型的代数表示
P是一个3*4矩阵,通常称为摄像机矩阵
CCD摄像机
zlu=PXc
摄像机矩阵:
P=K|I.O]
摄像机内参数矩阵:
K
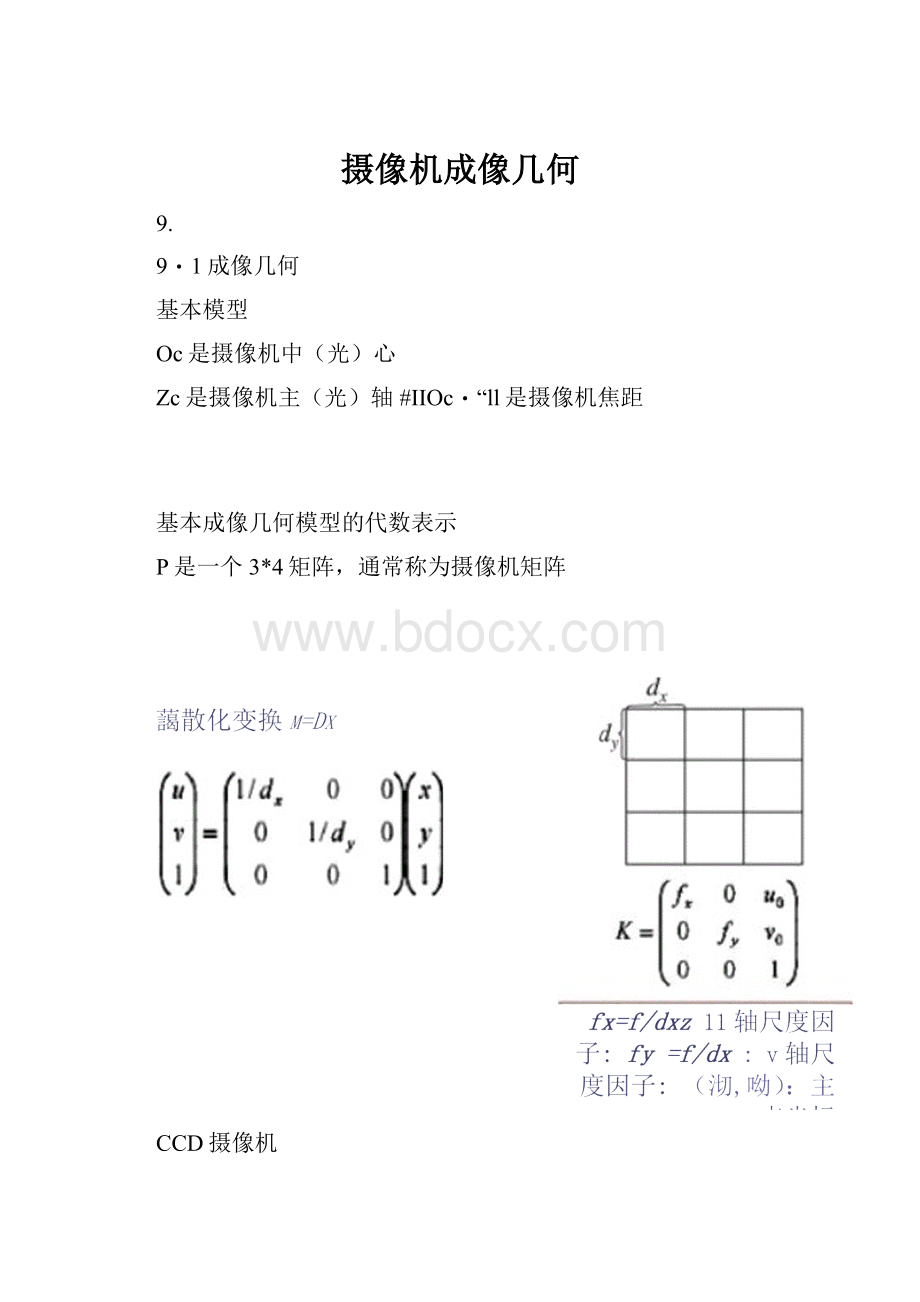
DLT算适(直接线•性变换算塗L
记摄像机矩阵为宀(卩"讣叽则有
u=pvrX/p^X
v=p"X/p"X
摄像机矩阵确定了一个从三维空间到图像平面的分式线性变换,有时,称它为退化的射影变换。
通常也称小孔模型为线性模型。
9.2摄像机矩阵元素的几何意义
摄律机中心
mmpx=o而幣惓飾i中心魏腔标系中斛标
世界堂标康点
X=(0.0,0.1)rP=(P",Pj』4)
◎
0
W%=PX"P「P2・P、,PJ()=p4
摄像机矩阵的第4列是世界坐标原点的图像坐标
世界堂标紬的方向
X=(I.O.O.O)r.F=(O.LO.Oy.Z=:
(O.OJ.O)7
Z町川1二PX«PrPNPJlPMJ
巧佗=py=P2■〜o,
片曲;二PZ=[J、x/
y
摄像机矩阵的前三列分别是三个坐标轴方向的图像坐标
主平面
与像平面平行的摄像机坐标平面称为主平面
AW
V
=PX=
piTX
A
凤丿
严=0
摄像机矩阵的第3行是主平面在世界坐标系中的坐标
方剜定的平面,即在世界坐标系中坐标为严解而.
图像平面I•轴与摄像机光心所确定的平面,在世界坐标系中的坐标是摄像机矩阵的第1行:
图像平面“轴与摄像机光心所确定的平面,在世界坐标系中的坐标是摄像机矩阵的第2行:
与像平面平行的摄像机坐标平面,在世界坐标系中的坐标是摄像机矩阵的第3行:
L轴MI:
VIfll是11:
交的,因此I轴必为tV血的法线.
2dcl(//)F主轴正向在世界坐标系中的衰示
-ttMB空间的摄律机矩阵一
H是一般射影空间到摄像机坐标空间的射影变换:
XC=HX加=K(/,O)Xr
m=K(I.O)HX
p00o']
/-KOIOOH
00I0^
仿射空间的摄■机矩阵
Xc
"ioooV
0100
0010,
欧氏空间的摄律机俺阵(度■单位审)
9・3基本几何元素的投影与反投影
P■(儿PJ
空间点
无穷远点的投影
m^PX
无穷远点的投影在3D■构中是非常直要的,因为从它能获得物体的仿射几何结构
PXj(H、pjX」Hd
直线的反投影
图像平面上一条直线的反投影是空间中通过摄像机中心的一张平面
在摄像机FF的图像应线/的反投场是空间平曲
x「(p7)=Npy)=q
I
7T=P‘I
以空问平盼为世界处■的0叩平面平jh上馭触标为X=go」r
y
0
I
冋1心小X厂(xjl)
无穷远平面到徐平面的单应
令HKKS则儿〃[=沪[
假崔无穷远点X=(V.灯“的图像为/〃•则仃
若二次曲线在支撐平面的表示为c,则它的像曲线为:
q二irTCHA
问3防&
GC蛊書卑X舜p畫i・「盍蠢恥寻SS吉蛊nKBc』4s0^Li兵B
盂蠱冷U黑C曹埜冒訂十塞S-董幣琴豐釜喜議C若孤qsy宰慕辱C算圭海汗養£蹇霾X?
異
二次曲面
(於飜雌斛P,二次岫』删附叨它加I肌觸励C:
M/1
(2匚次urn縱轍rmm小,其中o翻妬觥毬标•
绝对二次曲面的图像
在几何上,Q由2的切平面所组成。
在代数上Q扑-个秩为3
的4X4的齐次瞬来表鬲
.(10\
(?
.=/八
绝対訣帥血般像
nj^KK1
无穷远平面单应H◎:
H©(H©)t=kK〕=E
(H©yT(H©屮=0K-i=e
绝对二次曲线的图像:
0)=K・TK"
绝对二次曲面的图像:
coJKK】
9.4从图像恢复平面景物的几何结构
刖嫉性:
令{X:
。
}啊面黝的IO帆I户12・•・・.訓細谢斛,即0間ii黝竝某个仿酬标紆的邮,蛀联{X;gm;d以觸黝平翻解耐谢m胛•为xj=o,o)7,厅=(oj.o)r的点是聽平社踊个无艇■..
并舵f]邮I舫怖分朋”产旷盯諾,孑刊斗胡,毗聽卿社无喷餒觸朋线加胡恢屮。
已如描刖iki上无加述线的繰醴/•们上蚀齡帥•吋
1/外再衲个旳像点册|.加:
:
这样,任用像附IM得到4条仕纫||=片x叫・«=片阿,仃"“厶”""赊,它“枷的牖的诡找构成胸和谀国此,m&酬Tlfi上的•个和丽迦(犹・禺・&・扎舵的酣恤心码刚,W3.3.1所点在ft«jfiil:
it述斛标系,使即这个恂帼侧叫个处的知料标为
4m
2・“矢阱册]
恥刷臥",JJ23.4就饰‘册琲恤邮-般变剜叫即滋唯-的般建〃%舫叫畑4°姗皱训艸机艸中般肪法鸡悚令加|戶12…川爛濮枷抽緞删鮒烯,由般礬胛Mil•黜阻瞬点乐馳敝刼社O熾系下胁腔杭X》=(胛%JM
I恢复相似績构
从瞬魏复平靦物的刪斛的充要条件是赠雌關黝平瞞饨环点般仏
例如:
已知物体平面有两个相似的图形;圆(圆心未知)和两组平行直线已知圆心的圆
■厠睢令旷对皿躺黔闯"口.…»!
«'•.l!
l:
A:
黝竝某个鞭歸紆的怖.“口m叫训f•刚肿澜封鮒wM/广A阳、娜竝伽駅牺紆桝标址x;jl・i・叭厳(卜俯秫阳划倾脚期帅"$x;”#+昭m^riStr-r
克分杵:
已知物休T•面m-'Min.m,则无莎如H线的国像H线必为叫X侧/ffi/J:
«冲Zr,.「「.「J叫.叭成调和dfe・m过也忡条渐对应的最WT线是18互正交的,ft*35.2,宀iWi线八M卜5'
[In(升叫:
叫刖』也=兀4,则由竝M;'lagiicne)址刃,分別通过片.叫的仔jfcl两条1'f奶村应的的夬角尊】</4.-/./i滋过■泌的加黴・fM足通过"的苗条J1线・则19俾半曲I.的四个曲:
/«u■/x/j,mM■/)x/4.wr«/2x/;./«;,■/;x/4
剜馳溜他册4化Cw/JWM鯛J礪伽
iiiLkir-._..4哋长为财「一』輕縣傩卅讪II
為皿0」)[,l®LQ」)J』(UIU冋・1.1)
诜4竹H:
OTOWI^L:
.//;>(!
j=i.2…«•JjTlifi狮傩瀏mi叮'「邂河聘嵋躺.甜上述呱牺紆麵班fcXT」I2i・九端则剜flj繃血刪料,
恢复鉅对欧氏結构
从辎徹餌靦躺脈辎僦榦濮曲辦他龄娜点觸
牧相曲棘憎聽觸蹴I瓣预上龄竝确更亂
例如:
已知物体平面有两个全等的图形;
圆:
已知圆心和半径
证明必耍性:
餉X畀是和山物ftl製・,,D的个欧氏结构,即;X/}艸物点划、氷硕〔知採卜•的初,:
1加忙匡%砒收側黝平佛像恤的.换〃叭隔楙邙L1:
两个娜点的糾诙
m二〃”(泡0)'矿+甘・/»产〃⑷(UM胡"■貯
并酬任飾:
卜■«,.场所曲的黝怖「点斗1.X;也酌I
d(X『・X;")=d(〃3|wJ严反)
卅L已翊和场所对WT「「必,尽2何氏亚离为d・网个
Win.in们」•./叫叫一/册ml.lf]I-.,r,
<>I.I'“匕'L.I2“所对<11:
1."'nr.()_•.
XpXJ丫冲点.在JI.取另…个点农使待I'j.v,'jm./w,l)k関用共仏则I’L线人.厶=“心所对应的物体丫曲I的沔条/戲紂」.止交.m333斫八•怡恿M2的回決似.W\.^l•(•个点Itt*WJ|ln(V?
/W,/H,/MJ|/2/,T4,>lyJt;u分别lil(wWj.pH・■:
)的两条(怨WffiftflftlI的4个点,
Iff«/(x/t,IN,=/)x/j.ftl■/,x/j.■人x人
所对M的IjlllZ4个心XA..AtX,必枸成个对他线:
IQ为«/Ifj片於用丸4物仇TillI也屯歐氏坐岳系如用门.3肝示.则11汕惦,5&•心屁的坐标分别为
0
0
・匕=
e
<'>
1
✓
1
Z
从点啊x輒诙忙ifHM训计胖蝕//.
眈I./-1.2….•/删iM惆撕甌馆:
•帼殲〃T讪附「酗桃丫耐的舐蛭:
x、〃)jm.・•...・w饰
测系"吗敢舐頤系有胴朋對仁砌X:
|八门・・・・・.・讹勵肋
I紙翔。
9.5极几何兀:
极平面
令嚴e卅是-个阳应,则卅必时瞒曲的殲/:
!
:
加必釦M抽的瞅/;」:
,W:
桃仃。
(1)Vme/,刘埔在-条咄Z脈翘鶴卵和的肋讥/:
;
(2)W和上竝-条删^锻脈并醐開时卅的轴机S
社料师则处眺骡机觥幽制讪1毗帅讷灿駅軌朗僦丸仑踊眦脚的帅般伽。
基本矩阵
號两饨蚀鮒分恥M,遡个雛0啲像釉個加,儿HVM€/»
X($)=厂加+QSG(Y.8)
肿,P♦是砒广义逆,即/T*C翳-蚀觸觥心,UpPCm于是她
/:
“x/»i『c)刈p‘x($)卜(p'c)x(pp♦齢护cr(Fc)x(p0用冋4〃加即/>|,肆心。
id
F*]XP©]称为基本矩阵
/;二%览加对2的收线,/.?
加'是*对丿讪极线;豉等价地表初*'FmQ醃点分臓下述方私fe=0,f7=0;
W)=2,基木鮒有7个自由度.
例:
/•
輕
厂=:
Jt'I'a为一个任盘3维列向磺且e'=K't.折以
F屮儿WEL(fR・人勺人]=爪加心L+人加匸|门]用饥"I"
F引KgK'加
对[K几K7?
K“通过代数运%M以得到基木矩阵的三种表凤
F=[仇缈"=KT[4加=K:
加网4
1
1
极点2无穷单应本质矩阵无穷单应极点1
DLT算法
点对应:
m=(u,v,l)*nf=(u\v\l)
m,1Fm=0
从8对以上点对应,确怎F的线性解
]O宇Expansion.FOE)
第-个股馳啲内绅矩勒K,第二佛紘啲内参数解为乩方(i为曲)
d为坐标原点到甲面询诙
//="+弼)珂”制
DLT算法
点对应:
m=(u.v,l)*nf=(u\v\l)
srrf=Hin
m'⑨(Hm)=
0
从4对以上点对应,确定H的线性解
无穷远单应
H=("too)
Hg=KfRK-1
HtKKTHrr=
QCr_y_丄G
二K’K’t、
H:
K“LH:
=K‘「K-'
CO0j丄
O)
o/・
"
(D
草应的一般表示
竹和训巾敞枷以i灯确处
h」k‘rk・—无魁单应矩阵:
I押丽无关,仅与两个摄很M鋤瓣互姚(歸)有关;
Z—9Z«S«»O:
训丽无先仅浙二个聡M鋤觸应
“K%—平面我AlWIt上的劇胪:
绅面训朋-个根厭的便it辎-个13附1胖賄丸丙询二个斛机无关.
令/为两个播紗I下卜啟半而”的单朋阳电3mH为茉个平而X的单觥阵的充縣件是低三朋孙赧鲍
二维向帛再是半而;r住第一幅图像上的必消线,血是半而打•勺平仍的交线傾fllOM滋H线.
从6对点对应(其中4点共面•另外两点不在此平面上),确定F的线性解
9.7恢复摄1»机矩阵
前在-何軸训雕财劇下越主
»=PM』=P'M
鵬vp>,•
皈也
对組:
>=>M
ftiitt:
<卅池砧>,qP;xn
若糊像删,<护>有相同縫本邨FtHo
靛魅㈱H分鼾磁比繼鰹拥册叫oW咽/)
卅黔侧般厭的棘皺M圳表初
P叩测八(比纳
本讲重点
摄像机矩阵:
内参数阵,外参数阵.摄像机矩阵元素的几何意义
几何元素的投影与反投影:
像点的反投影.二次曲线的反投影:
平面的投影(单应).绝对二次曲线的投影绝对二次曲面的投影
两视点几何:
极几何,基本矩阵.单应,恢复摄像机矩阵(在射影意义下)
 升级会员
升级会员 