flexsim物流工程实验报告.docx
《flexsim物流工程实验报告.docx》由会员分享,可在线阅读,更多相关《flexsim物流工程实验报告.docx(18页珍藏版)》请在冰豆网上搜索。
flexsim物流工程实验报告
垃圾回收场仿真与分析
1.建立概念模型
1.1系统描述
近几十年来,由于人类的滥砍、滥伐,无情的破坏我们的大自然,地球上能用的资产和能源逐渐地减少,环保团体发现如果我们不再注重保护环境,终有一天我们会失去地球这个美好的家园。
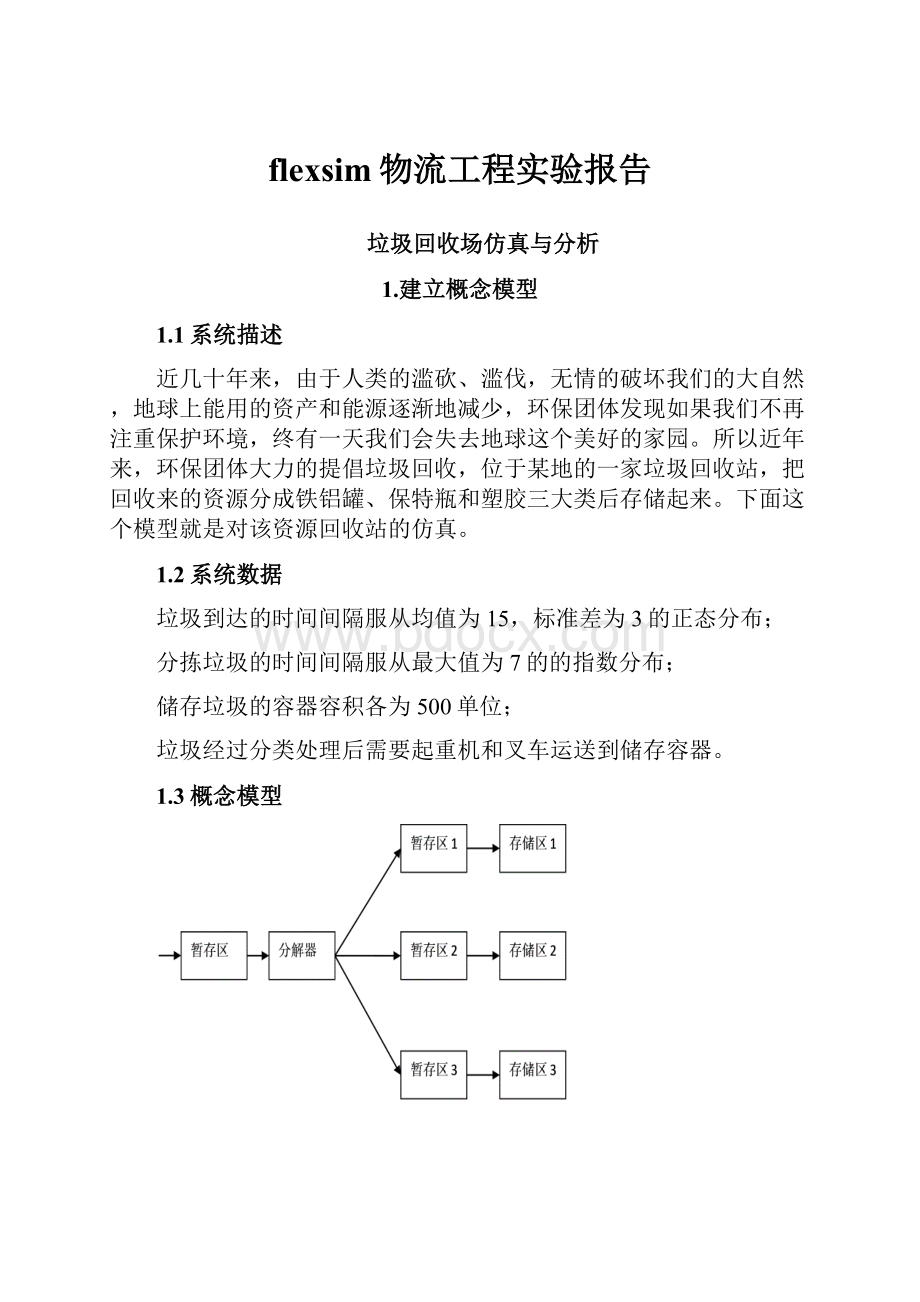
所以近年来,环保团体大力的提倡垃圾回收,位于某地的一家垃圾回收站,把回收来的资源分成铁铝罐、保特瓶和塑胶三大类后存储起来。
下面这个模型就是对该资源回收站的仿真。
1.2系统数据
垃圾到达的时间间隔服从均值为15,标准差为3的正态分布;
分拣垃圾的时间间隔服从最大值为7的的指数分布;
储存垃圾的容器容积各为500单位;
垃圾经过分类处理后需要起重机和叉车运送到储存容器。
1.3概念模型
2.建立Flexsim4模型
第1步:
模型实体设计
模型元素
系统元素
备注
Flowitem
回收到的垃圾
Source
产生垃圾
Queue
垃圾暂存区
Separator
垃圾分拣装置
将回收到的垃圾分拣后输出
Conveyor
传送设备
FlowNode
传送设备
Reservoir
垃圾存储容器
Rack
垃圾存储容器
Crane
垃圾搬运设备
Transporter
垃圾搬运设备
第2步:
在模型中加入Source(发生器)
从库中拖入一个Source到模型中。
右键点击该实体,选择Properties(属性),
在弹出的属性页中选择Visual项目,改变Position,Rotation,andSize中的RZ(绕Z轴方向旋转的角度)为45,使Processor偏转45度角放置。
点击Apply和OK保存设置。
更改后布局图如图12-3所示:
说明:
所有固定实体资源都可以通过这种操作来改变摆放的角度,故本章后面的类似实体摆放将不再截图描述操作细节。
第3步:
在模型中加入Queue和Separator
从库中拖放一个Queue和一个Separator到模型中。
如图摆放它们的角度和位置。
其中Queue和Separator的摆放角度(RZ值)都为45度。
如图12-4所示:
第4步:
在模型中加入Conveyor(传送带)
拖放两条Conveyor到模型中。
更改Conveyor的摆放角度和布局。
先改变Conveyor属性页中的RZ值为-45度。
双击Conveyor打开参数页,点选Layout项目。
更改section1中得length数值为5;
点击AddCurved添加一段弯曲得传送带,设置其radius为3。
点击Apply和OK保存并关闭窗口。
同样对另一条Conveyor也做布局上得改变。
更改section1中得length数值为5;
点击AddCurved添加一段弯曲得传送带,设置其radius为3。
第5步:
在模型中加入FlowNode(流节点)
在库中得下拉菜单中选择FixedResources。
然后从库中拖入一个FlowNode到模型中。
由于模型容量的限制所以将原来的3个改为1个。
第6步:
在模型中加入Queue和Reservoir(储液罐)
从库中拖入三个Queue和两个Reservoir到模型中,如图进行摆放。
其中Reservoir可以在库中得FixedResources中找到。
第7步:
在模型中加入Rack(货架)
从库中拖入一个Rack到模型,并调整其摆放得角度(RZ为90度)。
第8步:
在模型中加入Crane(起重机)、transporter(叉车)和Operator(操作员)
此处本来可以采用叉车,但是由于软件的限制(试用版本),不能在模型中加入太多的实体,所以将叉车去掉,用起重机代替。
从库中拖入Crane、transporter、Operator到模型中。
其中Crane在实体库的MobileResources中可以找到。
第9步:
连接端口
根据模型回收分类的顺序,先对固定实体进行连接(注意A连接是有方向的)。
A连接的次序依次是:
Source连接第一个Queue,Queue连接Separator,Separator同时连接到两条Conveyor和第一个FlowNode上,3个FlowNode依次连接最后连到一个Queue上,两条Conveyor分别连接两个Queue,上面的两个Queue再分别连接到两个Reservoir上,最下面的Queue连接到Rack上。
然后进行S连接:
将Operator连接Source后面的Queue,将Crane连接三个Queue中的上面两个,最后将Transporter连到最下面一个Queue。
最后布局图
第10步:
Source参数设置
双击Source打开属性设置页。
选择Source项目下的Inter-Arrivaltime中的NormalDistribution。
点击Inter-Arrivaltime下拉菜单后的参数编辑按钮
进行指令参数设置:
点击OK对修改进行保存。
接下来要对产生流动实体的颜色进行修改。
点选参数页中的SourceTriggers项目,在OnExit下拉菜单中选择SetColor。
点击OnExit下拉菜单后的参数编辑按钮
进行指令参数设置:
在弹出页中对参数做如下更改(粗体为改动部分):
“Assignitemthecolor:
colorblue”
这个指令表示Source产生实体时给每个实体一种颜色blue(蓝色)。
设定好后保存退出。
第11步:
Queue参数设置
双击打开一个Queue的参数设置页,点选Flow项目,在UseTransport前面点击打勾,表示需要操作员对流动实体进行搬运。
说明:
因为这个模型中的四个Queue都用到了Operator、Crane所以对它们都需要进行同样的设置。
第12步:
Separator参数设置
双击打开Separator参数设置页。
在ProcessTimes项目下的ProcessTime下拉菜单中选择ExponentialDistribution(指数分布)。
点击ProcessTime下拉菜单后面的参数编辑按钮
进行指令参数设置:
在弹出页中对参数做如下更改(粗体为改动部分):
这个指令表示Separator处理实体的时间间隔服从最大值为7的的指数分布。
点击Separator项目,点选Split(分解),在SplitorUnpackQuantity下拉菜单中选择SpecificNumber。
点击SplitorUnpackQuantity下拉菜单后面的参数编辑按钮
进行指令参数设置:
在弹出页中对参数做如下更改:
Split/Unpackquantityof3。
这个指令表示Separator将把实体分解为三份输出。
保存退出。
第13步:
Conveyor参数设置
双击上面第一条Conveyor,打开参数页。
点选Triggers项目,在OnExit下拉菜单中选择SetColor。
点击OnExit下拉菜单后面的参数编辑按钮
进行指令参数设置:
这个指令表示Conveyor在把实体送走的时候随机触发动作将实体染为绿色。
保存退出。
用同样的方法让下面的一条Conveyor在把实体送走的时候随机触发动作将实体染为黄色(即修改SetColor指令为coloryellow)
第14步:
Reservoir参数设置
双击一个Reservoir打开参数设置页。
在Reservoir项目下将MaximumContent改为500。
这个指令表示Reservoir的最大容量为500个。
同样对另外一个Reservoir也做同样的设置,使其最大容量为500个。
第15步:
Rack参数设置
双击打开Rack参数设置页。
改变Rack项目下的MaximumContent为500。
指令表示Rack的最大容量为500个。
第16步:
加入和设定3个Recorder
我们要使用3个Recorder对Separator工作时的状态和信息进行动态显示。
从库中拖入3个Recorder。
首先双击模型上部左边的Recorder,打开编辑窗口
单击DataCaptureSettings(数据收集设置)选项,弹出编辑框。
在TypeofData下拉菜单中选择StandardData(标准数据)。
选择StandardData后编辑窗口会对应显示出两个下拉菜单。
在ObjectName下拉菜单中选择Separator4,表示该Recorder要记录的是Separator4的数据。
在Datatocapture下拉菜单中选择Staytime(停留时间),表示该Recorder要显示的是Separator4的停留时间。
设置完毕后,然后单击Next,回到初始编辑窗口。
单击DisplayOptions(显示选项)。
在弹出的编辑窗口中的GraphTitle中填入:
SeparatorStaytime。
这个操作添加了Recorder的名称。
设置完成后点击Done完成设置。
最后保存退出。
再对该Recorder外观进行设置。
再将RX值改为90,将Recorder绕X轴转90度;将Z值改为3.00(即SY值的1/2),使Recorder在Z轴方向提高3个单位,与其它实体处于同一个水平面。
保存退出。
同理:
再对模型上部右侧的Recorder进行设置。
用和设置前面的Recorder同样的步骤。
在DataCaptureSettings中,进行如下设置:
TypeofData:
StandardData;
ObjectName:
Separator4;
Datatocapture:
Content(容量)。
单击Next。
同样单击DisplayOptions(显示选项)。
在弹出的编辑窗口中的GraphTitle中填入:
SeparatorContent。
点击Done保存退出。
然后设置该Recorder的属性。
在其属性编辑窗口中进行如下设置:
Z值改为3;RX值改为90;SX值改为6。
保存退出。
最后对模型下部的Recorder进行设置。
用和设置前面的Recorder同样的步骤,在DataCaptureSettings中,进行如下设置。
TypeofData:
StandardData;
ObjectName:
Separator4;
Datatocapture:
State(状态)
单击Next。
同样单击DisplayOptions(显示选项)。
在弹出的编辑窗口中的GraphTitle中填入:
SeparatorState。
点击Done保存退出。
然后设置该Recorder的属性。
在其属性编辑窗口中进行如下设置:
将Color设置为粉色;
将SX值设置为8.00;
将SY值设置为8.00。
设置完成后的模型图为:
第17步:
打开数据记录开关
Ctrl+鼠标矩形框选择全部,然后点击菜单栏中的Statsistic,在objectgraphdate的弹出菜单中点击selectedobjectsOn,这时可以在模型中看到所有实体都有被绿色框选中,这个操作相当于打开了数据收集开关;再点击HideGreenIndicatorBoxes,隐藏绿色选框。
3.模型运行
第18步:
编译
到此,我们可以对模型进行编译和运行了。
单击主视窗底部的
按钮。
编译过程完成后,就可以进行模型的重置和运行了。
第19步:
重置模型
单击主视窗左下角
按钮。
重置模型可以保证所有系统变量都是初始值,并将模型中所有流动实体清除。
第20步:
运行模型
单击主视窗底部
按钮。
可以看到模型开始运行,流动实体从Source发出,经过Queue短暂存储后进入Separator分解为三份再通过三条路径到达三个临时存储实体的Queue,然后通过Crane或者Transporter送到Reservoir和Rack。
同时可以看到Recorder对Staytime、Content和State三个数据进行动态展示。
如图12-45所示:
要停止运行,可随时按
按钮。
后面你将学到如何按特定时间长度和特定重复次数来运行模型。
当模型定义中用到随机分布时,多次运行模型是很重要的。
要加快或减慢模型运行速度,可左右移动视窗底部的运行速度滑动条。
图12-46模型运行速度控制栏
移动此滑动条能改变仿真时间与真实时间的比率,它完全不会影响模型运行的结果。
4数据分析
让模型运行一段时间,可以从模型图中直观的看出该模型的瓶颈所在。
由于Crane的工作效率比较慢,导致传送带发生了堆积,并影响倒Separator的效率,所以要优化这个系统,我们可以考虑提高Crane的速度,或者增加更多的Transporter来改善这种情况;同时在Reservoir和Rack存储满(500个)之后也会出现堆积和系统停滞,可以考虑增加存储设施或者输出设施(比如增加一个Sink)来解决这个问题。
当运行足够长的时间后,所有的货架和储存器都达到了上限的图为:
5.感想
这次试验和离散系统仿真试验(plantsimulation软件)有点像,况且有一个模板可以套用,所以不是很难做,但是由于软件本身的限制(非正式的版本)所以只好将流的节点flownode删掉了两个,这样模型中的实体数量就在使用版本所能容许的范围之内。
通过这次试验,加强了对物流系统的理解,也多了解了一个仿真软件,和plantsimulation软件对比来看,这个软件有三维功能,能够从不同的角度看出系统存在的问题,并且模型的连接分了不同的种类,A连接和S连接,我觉得这一点仅仅是本软件的优点,因为他将单向物流和双向物流区别对待,这样做更加条例清晰;而这也是缺点之一,由于不同的连接所以需要用鼠标不停地点击来连接,不像plantsimulation中直接可以拖动鼠标连接。
需要删除连接的时候不能直接用键盘的delete键来删除,需要点击disconnection按钮,再点击连接的实体,所以造成了很多冗余的操作。
此外由于是三维立体建模过程,所以显示比较慢,我觉得可以在开始建模之前先不要加载三维建模模块,这样建模的过程机器会快很多。
而且,操作习惯也和别的软件的大不相同,一些常用的快捷键比如全选,等都有很大的区别,这一点使得新学习的同学不容易上手。
 升级会员
升级会员 