模块功能.docx
《模块功能.docx》由会员分享,可在线阅读,更多相关《模块功能.docx(13页珍藏版)》请在冰豆网上搜索。
模块功能
基本控制模块说明
1.1普通单机电机
通常的操作都通过鼠标的左键来实现的。
所有的按钮、设备选择、输值等都是单击鼠标左键操作。
采用普通单机电机控制模块的常用设备有:
皮带机、破碎机、除尘器、堆料机、输送机、收尘器、分格轮、磨机低压控制柜、链斗机、翻板阀、电机、油泵、加热器、送粉机、空气分配器、给料机、小容量系统风机、收尘风机以及斜槽风机等等。
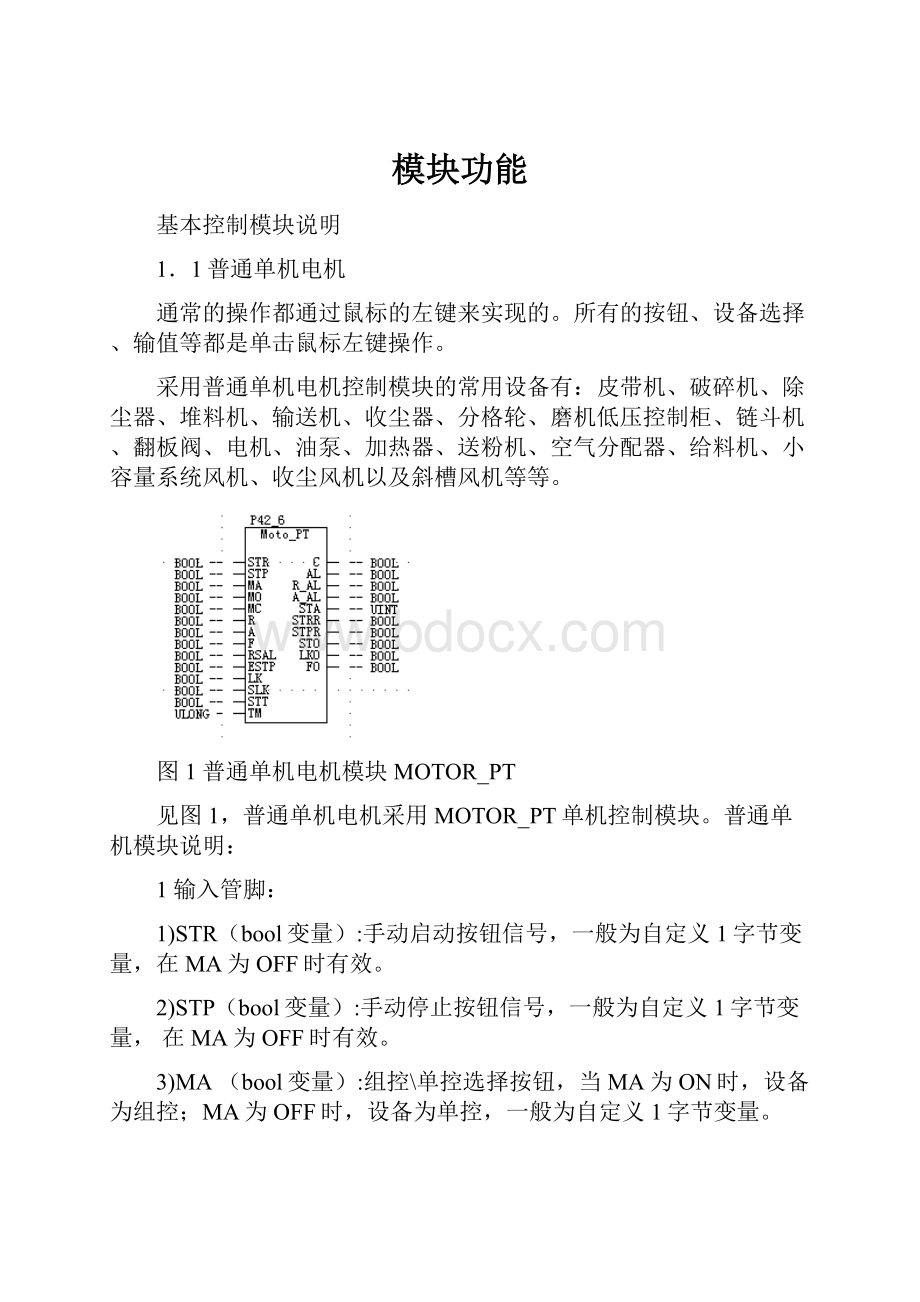
图1普通单机电机模块MOTOR_PT
见图1,普通单机电机采用MOTOR_PT单机控制模块。
普通单机模块说明:
1输入管脚:
1)STR(bool变量):
手动启动按钮信号,一般为自定义1字节变量,在MA为OFF时有效。
2)STP(bool变量):
手动停止按钮信号,一般为自定义1字节变量,在MA为OFF时有效。
3)MA(bool变量):
组控\单控选择按钮,当MA为ON时,设备为组控;MA为OFF时,设备为单控,一般为自定义1字节变量。
4)MO(bool变量):
组启动按钮信号,一般为自定义1字节变量,在MA为ON时有效。
5)MC(bool变量):
组停止按钮信号,一般为自定义1字节变量,在MA为ON时有效。
6)R(bool变量):
备妥信号:
R信号为ON时,即控制柜打向中控,由中控控制,才能对模块进行操作,控制电机启停,如在运行中R信号丢失,驱动C停止发出(变为OFF),设备停。
7)A(bool变量):
运行信号:
当A为ON时,代表现场设备已运行;为OFF则为停。
MOTOR_PT具备电机运行自检保护功能:
在设备启动过程,驱动发出TM秒内无A运行信号反馈,停驱动C(变为OFF);设备运行时,A运行信号变为OFF,停驱动C(变为OFF);
8)F(bool变量):
设备故障联锁信号:
针对有些设备需要安全连锁,当F为ON时,设备联锁停车,该信号不可解锁,一般连接信号有:
速度连锁、跑偏连锁、故障停机等连锁信号;
9)RSAL(bool变量)报警复位信号:
当RSAL为ON时复位报警,在设备启动失败、运行中备妥丢失、应答丢失或者出现故障信号时,必须对其复位才能进行下次操作。
10)EST(bool变量)组急停信号:
当遇到紧急情况需要进行快速停车时,EST为ON,相应组内设备急停;
11)LK(bool变量)保护连锁信号:
仅当SLK为OFF时,此信号有效,当LK为OFF时,连锁,设备启动不了或是在运行过程中设备停车;
12)SLK(bool变量)连锁解除信号:
当SLK为ON状态时,LK保护连锁信号无效;当SLK为OFF时,LK保护连锁信号有效。
13)STT(bool变量)允许启动信号:
只有当此信号为ON时,才能启动设备,当设备起动后,信号丢失,设备不停车;
14)TM(ULONG变量)应答超时时间:
应答超时时间设定(单位:
秒),当驱动发出后,经过TM时间后,应答还未反馈,认为应答超时,可判断为设备有问题,为保护设备,停止发出驱动。
一般设备此时间设为三到五秒,对于软起动,起动时间较长,可设为三十秒,具体情况可视实际情况进行调整;
2输出管脚:
1)C(bool变量):
驱动信号:
对现场设备进行驱动。
C为ON时,启动设备。
C为OFF时,设备停;
2)AL(bool变量):
报警输出:
设备所有产生的报警信号,包括R_AL、A_AL、F等产生的报警。
3)R_AL(bool变量):
备妥报警输出:
设备在中控驱动运行中,由于备妥丢失而产生的报警输出。
4)A_AL(bool变量):
应答报警输出:
设备在中控驱动运行中,由于应答丢失而产生的报警,或者由于应答超时产生的报警输出。
5)STA(UINT变量):
运行状态信号:
值为0,无备妥无应答;
值为1,有备妥无应答,准备就绪,中控可以启动;
值为2,有应答无备妥,现场启动,正常运行;
值为3,有备妥有应答,中控启动,正常运行;
值>4,启动故障或跳闸故障;
注:
STA为设备显示变量(UINT变量),上位机设备的状态显示定义为:
值为0,白色;
值为1,黄色;
值为2,蓝色;
值为3,绿色;
值为4,红色。
6)STRR(bool变量):
复位STP:
接输入STR的一字节变量,对该一字节变量复位;
7)STPR(bool变量):
复位STP:
接输入STP的一字节变量,对该一字节变量复位;
8)STO(bool变量):
允许启动状态输出:
对STT输入的多个条件进行整合输出,在上位机显示设备是否允许中控操作员操作。
;
9)LKO(bool变量):
联锁停车输出:
对LK输入的多个条件进行整合输出。
10)FO(bool变量):
安全保护停车输出:
对F输入的多个条件进行整合输出;
1.2正反转带限位电机
采用正反转带限位电机控制模块的设备有:
电动推杆、三通阀、分料阀、扇形闸门等。
状态显示有:
正向运行(电机正向转动状态)、反向运行(电机反向转动状态)、正向限位显示(显示电机正向位置到状态)、反向限位显示(显示电机反向位置到状态)、设备备妥显示(指示设备可由中控控制)、设备报警(DI信号,不参与电机的连锁);设备操作:
正转操作(设备在无报警状态及正向限位,有备妥信号时可进行正转操作),反转操作(设备在无报警状态及反向限位,有备妥信号时可进行反转操作)。
图2正反转带限位电机模块MOTOR_FM
见图2,正反转带限位电机采用MOTOR_FM单机控制模块。
正反转带限位电机模块说明:
1输入管脚:
1)STR(bool变量):
正转单机启动信号:
当STR为ON时单机开设备正向运行,在MA为OFF时有效;
2)STP(bool变量):
反转单机启动信号:
当STP为ON时单机开设备反向运行,在MA为OFF时有效;
3)MA(bool变量):
组控\单控选择按钮,当MA为ON时,设备为组控;MA为OFF时,设备为单控,一般为自定义1字节变量。
4)MO1(bool变量):
组正转启动按钮信号,一般为自定义1字节变量,在MA为ON时有效。
5)M02(bool变量):
组反转启动按钮信号,一般为自定义1字节变量,在MA为ON时有效。
6)MC(bool变量):
停止信号:
当MC为ON时停设备,单控\组控模式下均有效;
7)R(bool变量):
备妥信号:
R信号为ON时,即控制柜打向中控,由中控控制,才能对模块进行操作,控制电机启停,如在运行中R信号丢失,正反转驱动停止发出(变为OFF),设备停车;
8)RN1(bool变量):
正转运行信号:
当RN1为ON时,代表现场设备已正转运行;为OFF则为停。
MOTOR_FM具备电机运行自检保护功能:
在设备启动或运行过程,正转驱动发出TM1个秒内无RN1运行信号反馈,停正转驱动C1(变为OFF);
9)RN2(bool变量):
反转运行信号:
当RN2为ON时,代表现场设备已反转运行;为OFF则为停。
MOTOR_FM具备电机运行自检保护功能:
在设备启动或运行过程,反转驱动发出TM1个秒内无RN2运行信号反馈,停反转驱动C2(变为OFF);
10)I1(bool变量):
正向限位信号:
当I1为ON时,代表现场设备正向运行到位,自动停正向驱动。
正向限位有反馈时,模块正向操作保护,系统不能操作正向电机;
11)I2(bool变量):
反向限位信号:
当I2为ON时,代表现场设备反向运行到位,自动停反向驱动。
反向限位有反馈时,模块反向操作保护,系统不能操作反向电机;
12)RSAL(bool变量)报警复位信号:
当RSAL为ON时复位报警,在设备启动失败、运行中备妥丢失、应答丢失、限位超时或者出现故障信号时,必须对其复位才能进行下次操作。
13)EST(bool变量)组急停信号:
当遇到紧急情况需要进行快速停车时,EST为ON,相应组内设备急停;
14)F(bool变量):
设备故障联锁信号:
针对有些设备需要安全连锁,当SI为ON时,设备联锁停车,该信号不可解锁;
15)TM1(ULONG变量):
应答超时时间:
应答超时时间设定(单位:
秒),当驱动发出后,经过TM1时间后,应答还未反馈,认为应答超时,可判断为设备有问题,为保护设备,停止发出驱动。
一般设备此时间设为三到五秒,具体情况可视实际情况进行调整;
16)TM2(ULONG变量):
限位保护时间:
从驱动发出开始运行到运行到位的时间(单位:
秒),超过这时间,限位仍未有反馈就认为设备故障,停正反转驱动。
2输出管脚:
1)C1:
正转驱动信号:
对现场设备进行正转驱动。
C1:
为ON时,启动设备。
C2:
为OFF时,设备停;
2)C2:
反转驱动信号:
对现场设备进行反转驱动。
C1:
为ON时,启动设备。
C2:
为OFF时,设备停;
3)R_AL:
备妥报警输出:
设备在中控驱动运行中,由于备妥丢失而产生的报警输出。
4)A_AL:
应答报警输出:
设备在中控驱动运行中,由于应答丢失而产生的报警,或者由于应答超时产生的报警输出。
5)I_AL:
限位超时报警输出:
设备在中控驱动运行中,由于应答超时产生的报警输出。
6)AL:
报警输出:
设备所有产生的报警信号,包括R_AL、A_AL、I_AL、F等产生的报警。
7)STA运行状态信号:
值为1,无备妥无应答;
值为2,有备妥无应答,无限位,准备就绪,中控可以启动;
值为3,有备妥,有正向限位;
值为4,有备妥,有反向限位;
值为5,故障;
值为6,有备妥有正向应答,表示设备正在正向运行;
值为7,有备妥有反向应答,表示设备正在反向运行;
注:
STA为设备显示变量(无符号整形变量),上位机设备的状态显示定义为:
值为1,白色;
值为2,黄色;
值为3,绿色;
值为4,蓝色;
值为5,红色;
值为6,绿色闪烁;
值为5,蓝色闪烁。
4)STRR复位FMOP:
接输入STRP的一字节变量,对该一字节变量复位;
5)STPR复位RMOP:
接输入STP的一字节变量,对该一字节变量复位;
6)MCR复位MTP:
接输入MC的一字节变量,对该一字节变量复位;
1.3高压电机
采用高压电机控制模块的常用设备有:
生料磨主机、煤磨主机、水泥磨主机、生料粉磨系统风机、窑尾排风机、窑头排风机、高温风机等大容量电机。
状态显示有:
高压柜应答显示(显示电机运行状态)、高压柜备妥显示(指示设备可由中控控制)、高压柜故障(设备故障参与设备联锁控制,有故障信号发停高压柜脉冲);设备操作:
合闸操作(设备在无报警状态无故障,有备妥信号时可进行开高压柜操作),分闸操作(关高压柜操作)。
图3高压电机控制模块MOTOR_HI_VOLTAGE
见图3,高压电机控制采用MOTOR_HI_VOLTAGE单机控制模块。
电机模块说明:
1输入管脚:
1)MOP:
手启动信号:
当PAS为ON时有效,当MOP为ON时单机开设备,MOTOR_HI_VOLTAGE接收MOP的长开信号,MOTOR_HI_VOLTAGE对MOP复位;
2)MTP:
手停止信号:
当PAS为ON时有效,当MTP为ON时单机停设备,MOTOR_HI_VOLTAGE接收MTP的长开信号,MOTOR_HI_VOLTAGE对MTP复位;
3)ALMACK:
报警复位信号:
当ALMACK为ON时复位报警,MOTOR_HI_VOLTAGE接收ALMACK的长开信号,MOTOR_HI_VOLTAGE对ALMACK复位;
4)STY:
允许启动信号:
只有当此信号为ON时,才能启动设备,当设备起动后,信号丢失,设备不停车;
5)RY:
备妥信号:
RY信号为ON时,即控制柜打向中控,由中控控制,才能对模块进行操作,控制电机启停,如在运行中RY信号丢失,设备不停车;
6)RN:
运行信号:
当RN为ON时,代表现场设备已运行;为OFF则为停;
7)RNT:
应答超时时间:
应答超时时间设定(单位:
ms),当驱动发出后,经过RNT时间后,应答还未上来,认为应答超时,可判断为设备有问题,为保护设备,停止发出驱动,设备报警,设备应报警确认后才能下次启动;
8)GOP:
组启动信号:
当PAS为OFF时有效,当GOP为ON时设备启动;MOTOR_HI_VOLTAGE接收GOP的脉冲信号,MOTOR_HI_VOLTAGE不对GOP复位;
9)GTP:
组停止信号:
当PAS为OFF时有效,当GTP为ON时停设备,MOTOR_HI_VOLTAGE接收GTP的脉冲信号,MOTOR_HI_VOLTAGE不对GTP复位;
10)LK:
保护连锁信号:
当PAS为OFF时,此信号有效,当LK为ON时,连锁,设备启动不了或是在运行过程中设备停车;
11)PAS:
手自动选择方式及连锁解除信号:
当PAS为ON状态时该设备为手动单机操作方式,LK保护连锁信号无效;当PAS为OFF时为组自动方式。
通常在确定分组后,定义1一字节PAS手自动选择方式及连锁解除信号变量,通过它同时控制分组内的各台设备运行方式;
12)ESP:
组急停信号:
当遇到紧急情况需要进行快速停车时,ESP为ON,相应组内设备急停;MOTOR_HI_VOLTAGE接收ESP脉冲信号,MOTOR_HI_VOLTAGE不对ESP复位;
13)SI:
设备故障联锁信号:
针对有些设备需要安全连锁,当SI为ON时,设备联锁停车,该信号不可解锁,一般连接信号有:
过载停机、故障停机等连锁信号;
2输出管脚:
1)DRIVE:
合闸驱动信号:
对现场设备进行启动驱动。
DRIVE为3秒脉冲,启动设备;
2)STOP:
分闸驱动信号:
对现场设备进行停止驱动。
STOP为3秒脉冲,停设备;
3)STA:
运行状态信号:
值为0,无备妥无应答;
值为1,有备妥无应答,准备就绪,中控可以启动;
值为2,有应答无备妥,现场启动,正常运行;
值为3,有备妥有应答,中控启动,正常运行;
值>4,启动故障或跳闸故障;
注:
STA为设备显示变量(UINT变量),上位机设备的状态显示定义为:
值为0,白色;
值为1,黄色;
值为2,蓝色;
值为3,绿色;
值为4,红色。
3)REMOP:
复位MOP:
接输入MOP的一字节变量,对该一字节变量复位;
4)REMTP:
复位MTP:
接输入MTP的一字节变量,对该一字节变量复位;
3)REAAK:
复位ALMACK:
接输入ALMACK的一字节变量,对该一字节变量复位;
1.4组控模块
图4组控制模块GOPC
见图4,组控制采用GOPC控制模块。
电机模块说明:
1输入管脚:
1)GOP:
组控\单控选择信号,ON为组控模式,模块工作,OFF为单控模式,组控模块不工作。
2)GOPIN:
组控启动信号:
当GOPIN为ON时,组内设备按照设定顺序和时间依次启动,在GOP为ON时有效;
3)GTPIN:
组控停止信号:
当GTPIN为ON时,组内设备按照设定顺序和时间依次停止,在GOP为ON时有效;
4)GCANCL:
组启动或停止取消信号,当组内设备正在启动过程中(没有全部运行或停止),GCANCL为ON时,组启动或者组停止命令取消,后续设备不进行组控启停。
5)GEST:
组急停信号,
6)RD:
组备妥信号,
7)AL:
组故障信号,
8)LK:
组联锁信号,
9)RNS:
组允许启动信号,
10)RN1:
组内设备1应答信号,
11)RN2:
组内设备2应答信号,
12)RN3:
组内设备3应答信号,
13)RN4:
组内设备4应答信号,
14)RN5:
组内设备5应答信号,
15)RN6:
组内设备6应答信号,
16)RN7:
组内设备7应答信号,
17)OT1:
组内设备1启动间隔时间,表示从发出组启命令到第1个设备启动间隔时间(单位:
秒),也表示组启预告警铃的时间。
18)OT2:
组内设备2启动间隔时间,表示从第1个设备运行后到第2个设备启动间隔时间(单位:
秒),即第2个设备启动间隔时间。
19)OT3:
组内设备3启动间隔时间,表示从第2个设备运行后到第3个设备启动间隔时间(单位:
秒),即第3个设备启动间隔时间。
20)OT4:
组内设备4启动间隔时间,表示从第3个设备运行后到第4个设备启动间隔时间(单位:
秒),即第4个设备启动间隔时间。
21)OT5:
组内设备5启动间隔时间,表示从第4个设备运行后到第5个设备启动间隔时间(单位:
秒),即第5个设备启动间隔时间。
22)OT6:
组内设备6启动间隔时间,表示从第5个设备运行后到第6个设备启动间隔时间(单位:
秒),即第6个设备启动间隔时间。
23)OT7:
组内设备7启动间隔时间,表示从第6个设备运行后到第7个设备启动间隔时间(单位:
秒),即第7个设备启动间隔时间。
24)CT1:
组内设备1停止间隔时间(单位:
秒),
25)CT2:
组内设备2停止间隔时间(单位:
秒),
26)CT3:
组内设备3停止间隔时间(单位:
秒),
27)CT4:
组内设备4停止间隔时间(单位:
秒),
28)CT5:
组内设备5停止间隔时间(单位:
秒),
29)CT6:
组内设备6停止间隔时间(单位:
秒),
30)CT7:
组内设备7停止间隔时间(单位:
秒),
31)NUM:
组内设备个数。
2输出管脚:
1)GOPOUT:
2)GTPOUT:
3)RGOP:
4)RGTP:
5)RGCL:
6)RGEST:
7)AOUR:
8)ALOUT:
9)LKOUT:
10)ALLRN:
11)ALLSTP:
12)GO1:
13)GO2:
14)GO3:
15)GO4:
16)GO5:
17)GO6:
18)GO7:
19)GT1:
20)GT2:
21)GT3:
22)GT4:
23)GT5:
24)GT6:
35)GT7:
36)GORING:
 升级会员
升级会员 