机电一体化培训理论考试.docx
《机电一体化培训理论考试.docx》由会员分享,可在线阅读,更多相关《机电一体化培训理论考试.docx(12页珍藏版)》请在冰豆网上搜索。
机电一体化培训理论考试
一、
单项选取题(共50分,每题1分)
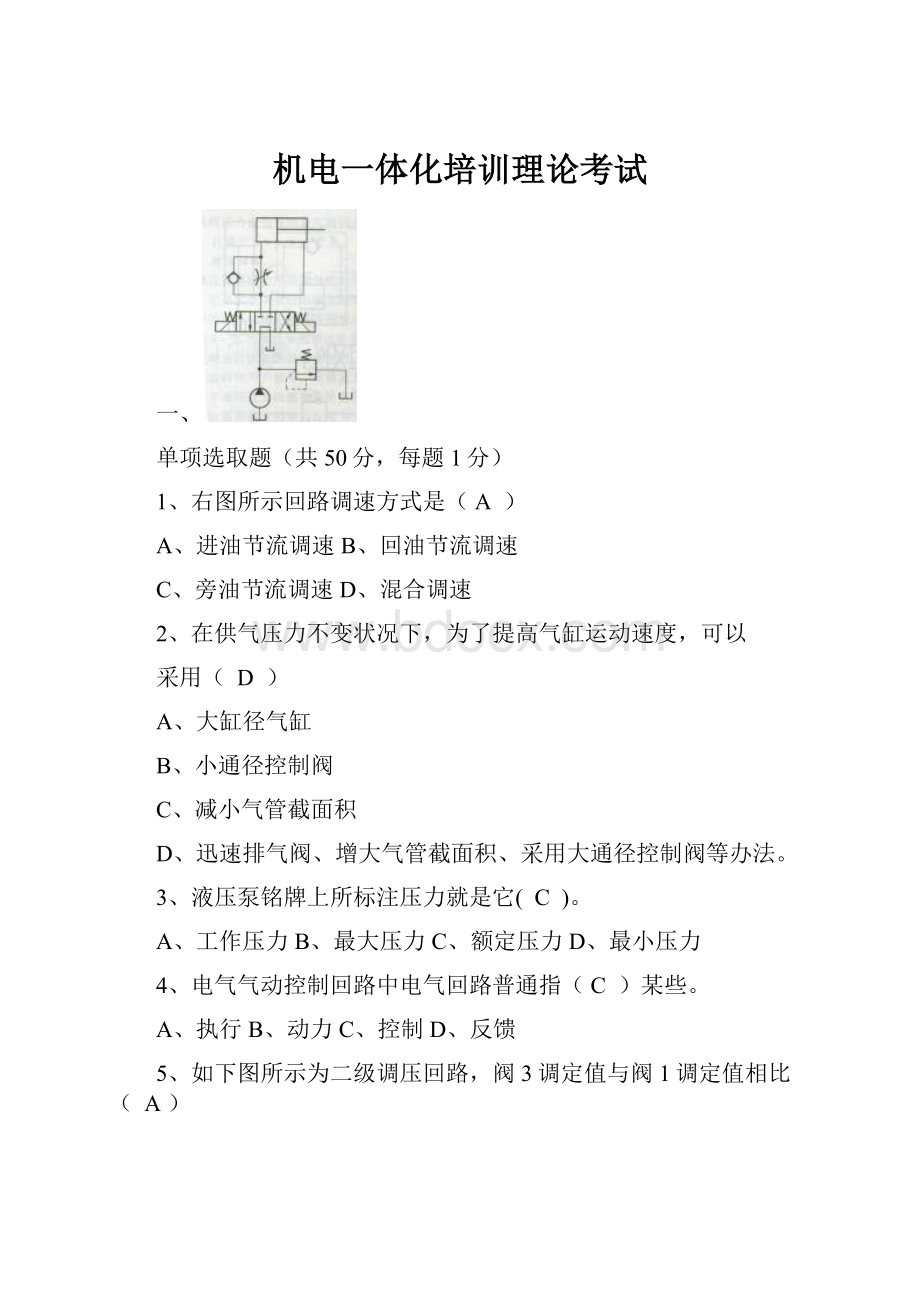
1、右图所示回路调速方式是(A)
A、进油节流调速B、回油节流调速
C、旁油节流调速D、混合调速
2、在供气压力不变状况下,为了提高气缸运动速度,可以
采用(D)
A、大缸径气缸
B、小通径控制阀
C、减小气管截面积
D、迅速排气阀、增大气管截面积、采用大通径控制阀等办法。
3、液压泵铭牌上所标注压力就是它(C)。
A、工作压力B、最大压力C、额定压力D、最小压力
4、电气气动控制回路中电气回路普通指(C)某些。
A、执行B、动力C、控制D、反馈
5、如下图所示为二级调压回路,阀3调定值与阀1调定值相比(A)
A、前者不不大于后者B、后者不不大于前者C、两个同样大D、无特殊规定
6、选取热继电器重要依照所保护电动机(A)来拟定热继电器规格和热元件电流级别,
A、额定电流B、额定电压C、额定功率D、功率因数
7、液压泵吸油口普通安装过滤器,其额定流量应为液压泵流量(C)倍。
A、1B、0.5C、2D、3
8、当气缸浮现输出力局限性故障时,也许因素是(D)
A、缓冲调节阀松动B、负载过大C、活塞密封件磨损D、以上都是
9、对运动平稳性规定较高液压缸,需在液压缸最高处设排气装置,普通采用(C)。
A、节流阀B、溢流阀C、排气阀D、减压阀
10、无杆气缸长处是节约了安装空间,特别合用(B)场合。
A、大缸径、长行程B、小缸径、长行程C、小缸径、短行程D、大缸径、短行程
11、双伸出杠液压缸,采用活塞杠固定安装,工作台移动范畴为缸筒有效行程(B)。
A、1倍B、2倍C、3倍D、4倍
12、下图连接方式是:
(B)。
A、PNP型B、NPN型C、不能拟定D、继电器输出型
13、检测电机转子转速,普通采用(A)
A、增量式角度编码器B、绝对式角度编码器C、光栅尺D、磁栅尺
14、应变测量中,采用应变变换原理可以将微小应变变化转换为(C)变化,再运用电桥原理实现电信号输出。
A、电流B、压力C、电阻D、温度
15、霍尔接近开关和干簧管开关能检测到(D)。
A、金属物质B、塑料C、任何物质D、磁性物质
16、用色差(光电)传感器区别黑、红工件,当工件变成红、黄时,那一种办法最佳、最有效。
(C)
A、调检测距离B、更换传感器C、调敏捷度D、变化安装方式
17、测量200℃温度,当精度相似时,传感器量程选取那块传感器?
(A)
A、量程50~250℃B、量程0~500℃C、量程-50~300℃D、量程0~200℃
18、(A)是指传感器实际特性曲线与拟合直线之间最大偏差和传感器满量程输出比例。
A、线性度非线性误差B、辨别率C、敏捷度D、精确度
19、电涡流式传感器不能测量参数是(C)。
A、位移测量;B、振幅测量;C、亮度测量;D、转速测量
20、在热电偶测温回路中经常使用补偿导线最重要目是(C)。
A.补偿热电偶冷端热电动势损失B.起冷端温度补偿作用
C.将热电偶冷端延长到远离高温区地方D.提高敏捷度
21、在PLC中,顾客可以通过编程器修改或增删是(B)。
A、系统程序B、顾客程序C、任何程序D、汇编程序
22、在PLC中,(C)是具备掉电保持功能软继电器。
A、输入继电器B、输出继电器C、记忆型计数器D、定期器
23、小型PLC输入输出点数普通为(B)。
A、8192点以上B、64~128点C、128~512点D、512~8192点
24、自锁电路对的连接办法是接触器(A)。
A、动合辅助触点与启动按钮并联B、动合辅助触点与启动按钮串联
C、动断辅助触点与启动按钮并联D、动断辅助触点与启动按钮串联
25、PLC采用工作方式是(C)。
A、键盘扫描方式B、I/O扫描方式C、循环扫描方式D、以上都不对
26、在进行PLC输入/输出点选取时,应先弄清晰控制系统I/O总点数,再按实际所需总点数(A)留出备用量后拟定所需PLC点数。
A、15~20%B、5~15%C、20~35%D、35~40%
27、对于PLC,(D)是指主机和编程器各有一种CPU,主机CPU完毕对现场控制,在每一种扫描周期末尾与编程器通信,编程器把修改程序发给主机,在下一种扫描周期主机将按新程序对现场进行控制。
A、线性化编程B、模块化编程C、构造化编程D、在线编程
28、下列那一段程序段更好些?
(B)。
A、
B、
C、
D、
29、步进电动机采用三相单三拍通电方式时步距角为0.90,改为三相六拍时步距角为(A)。
A、0.45°B、0.3°C、1.8°D、0.6°
30、一正弦交流电最大值为10A,频率为50Hz,初相位-30度,它解析式为(B)
A、i=10sin(314t+30)B、i=10sin(314t-30)C、i=5sin(314t+30)D、i=5sin(314t-30)
31、一块数字式压力批示表,显示范畴为0~99KPa,批示小数点后两位,则该表辨别率为(C)。
A.1KPaB.0.1KPaC.0.01KPaD.0.001Kpa
32、伺服控制系统普通涉及控制器、被控对象、执行环节、比较环节和(D)等五某些。
A、换向构造B、转换环节C、存储电路D、检测环节
33、PWM指是( C )。
A、机器人 B、计算机集成系统C、脉宽调制 D、可编程控制器
34、PID控制器是(D)。
A、比例-微分控制器B、比例-积分控制器C、微分-积分控制器D、比例-积分-微分控制器
35、增量型编码器可依照(D)信号调节基准位置。
A、A相B、C相C、Y相D、Z相
36、从反馈角度区别,机电一体化系统可以分为(B)
A、机械系统与电气系统B、开环系统与闭环系统
C、柔性系统与刚性系统D、模仿系统与数字系统
37、在对接触器进行整体检测,要用(A)测量各触头间及主触头对地电阻与否符合规定,然后用手按动主触头检查运动某些与否灵活,以防产生接触不良、振动和噪声。
A、兆欧表B、电流表C、电压表D、功率表
38、电器连接时,除依照控制规定连接好线路外,其金属板上接地螺钉必要与(D)可靠连接,保证使用安全。
A、电源线B、避雷线C、零线D、接地线
39、国标GB/T20540-使(B)总线成为中华人民共和国第一种工业现场总线原则。
A、CAN总线B、PROFIEUS总线C、TCP/IP总线D、PCI总线
40、安装熔断器时,各级熔断器要互相配合,做到下一级熔体规格比上一级规格(B)。
A、大B、小C、同样D、上述都可以
41、不是闭环控制系统长处是(D)
A、精度高B、动态性能好C、抗干扰能力强D、易于维修
42、电阻式位移传感器应配合PLC如下(A)使用。
A、A/D单元B、D/A单元C、电源单元D、高速计数单元
43、CIMS是指:
(B)
A、柔性制造系统B、计算机集成制造系统
C、数字控制系统D、机器人系统
44、PLC与外围设备采用(A)方式最佳。
A、专用接地B、共用接地C、公共接地D、以上都可
45、在蜗轮副传动中,若蜗杆是右旋,则蜗轮应为(B)
A、左旋B、右旋C、左、右旋均可D、直齿
46、曲柄摇杆机构中,当(D)为积极件时机构有死点位置浮现。
A、曲柄B、摇杆任意一种相邻杆C、连杆D、摇杆
47、欲在两轴相距较远,工作条件恶劣环境下传递较大功率,宜选(B)。
A、带传动B、链传动C、齿轮传动D、蜗杆传动
48、直线滚动导轨是近年来新浮现一种滚动导轨,下面哪项不是它构成:
(D)
A、导轨体B、保持器C、滚珠D、轴承
49、在电工测量系统中,电流互感器二次线圈不容许(B):
A、短路B、开路C、接地D、以上都是
50、在机械传动中,传动效率高、构造紧凑、功率和速度合用范畴最广是(C)。
A、带传动B、链传动C、齿轮传动D、摩檫轮传动
二、填空题(共20分,每空1分)
1、气缸选取要点有:
气缸行程长度、气缸输出力大小、活塞运动速度、安装方式。
2、气缸活塞运动速度过慢也许因素是:
排气通路受阻;负载与气缸实际输出力相比过大;、活塞杆弯曲。
(除了前面三个因素,本题还可有其她因素,请阅卷教师注意学生答案。
)
3、齿轮泵存在着三个也许泄漏部位,其中对泄漏影响最大是端面间隙泄漏。
4、一块精度级别为0.5级表,量程为0~300℃,该表也许产生最大误差是±1.5℃。
5、NPN型与PNP型传感器重要区别是:
PNP输出端为高电平,NPN输出端为低电平。
6、普通传感器由敏感元件、传感元件及测量转换电路三某些构成。
7、PLC接口电路重要分为两大类。
一类是采用光电隔离方式,另一类是采用固体继电器隔离方式。
8、不同负载对PLC输出方式有相应规定。
频繁通断感性负载,应选取晶体管或晶闸管输出型,而不应选用继电器输出型。
8、三相异步电动机变化转向办法是任意对调两相接线;单相异步电动机变化转向办法是调换主绕组或到副绕组中任一绕组端头;直流电动机变化转向办法是变化电枢电流方向。
9、在变频器调速应用中,普通异步电机使用频率普通不能超过70Hz,负载为电扇、水泵时电机频率普通不能超过50Hz,变频器外加金属片作用是散热。
10、机电一体化有关技术重要是指检测技术、信息解决技术、接口技术、动力驱动控制技术、机械系统技术、自动控制技术等。
三、分析题(共15分)
1、简述图示气压回路工作原理。
(6分)
参照答案:
设按下阀1时,气信号经阀2至阀4左端使阀4换至左位,同步使阀5切断气路,此时气缸向外伸出;当阀1复位时,原通入阀4左控制端气信号经阀1排空,阀5复位,于是气缸无杆腔气经阀5至阀2左端,使阀2换至左位等待阀1下一次信号输入。
当阀1第二次按下后,气信号经阀2左位至阀4右控制端使阀4换至右位,气缸退回,同步阀3将气路切断。
待阀1复位后,阀4右控制端信号经阀2阀1排空,阀3复位并将气导至阀2右端使其换至右位,又等待下一次信号输入。
这样,第1、3、5次(奇数)按住阀1,则气缸伸出;第2、4、6(偶数)按下阀1,则气缸退回。
2、某带光电码盘伺服电动机与滚珠丝杠直联(传动比1:
1),光电码盘角度辨别力为1024脉冲/r,丝杠螺距8mm,在数控系统伺服中断时间4s内共计脉冲数1024脉冲,则在该段时间里,工作台移动距离是多少mm?
伺服电动机转速是多少r/min。
(3分)
参照答案:
工作台移动:
1/1024r/脉冲×8mm/r×1024脉冲=8mm。
伺服电动机转速:
(1/1024r/脉冲×1024脉冲)/(4s/60)=15r/min。
3、试用PLC编程实现下面控制规定。
按下正转起动按钮SB1电动机即正转起动运营,按下反转起动按钮SB2电动机即反转起动运营,按下停止按钮SB,电动机停止运营;电动机正转运营时,按反转起动按钮SB2电动机即反转,电动机反转运营时,按正转起动按钮SB1电动机即正转。
(6分)
参照答案:
输入、输出I/O分派如下
SB1:
X0SB2:
X1SB:
X2
正转接触器:
Y0反转接触器:
Y1
PLC程序:
四、综合应用题(共15分)
图示为一工业自动化装配装置,工作时,传送带将工件输送到位,并由位置传感器发出信号驱动气缸A,将第一种工件压入基本工件孔中,工件压入速度规定可调。
当气缸A输出压力达到10bar时,气缸B才将另一种工件压入。
延时5秒后气缸B先缩回到初始位,然后气缸A缩回至初始位。
该装置采用位置传感器检测工件,压力传感器检测气缸A输出压力,行程开关检测气缸A、B位置。
设计内容:
1、设计该装置气动回路图(6分)
2、以图示形式完毕PLCI/O口端子分派(3分)
3、编写PLC控制程序(6分)
答案:
(1)气动回路
(2)PLCI/O口端子分派
X0接位置传感器
X1接压力传感器
(3)PLC程序
 升级会员
升级会员 