四足仿生月球机器人.docx
《四足仿生月球机器人.docx》由会员分享,可在线阅读,更多相关《四足仿生月球机器人.docx(24页珍藏版)》请在冰豆网上搜索。
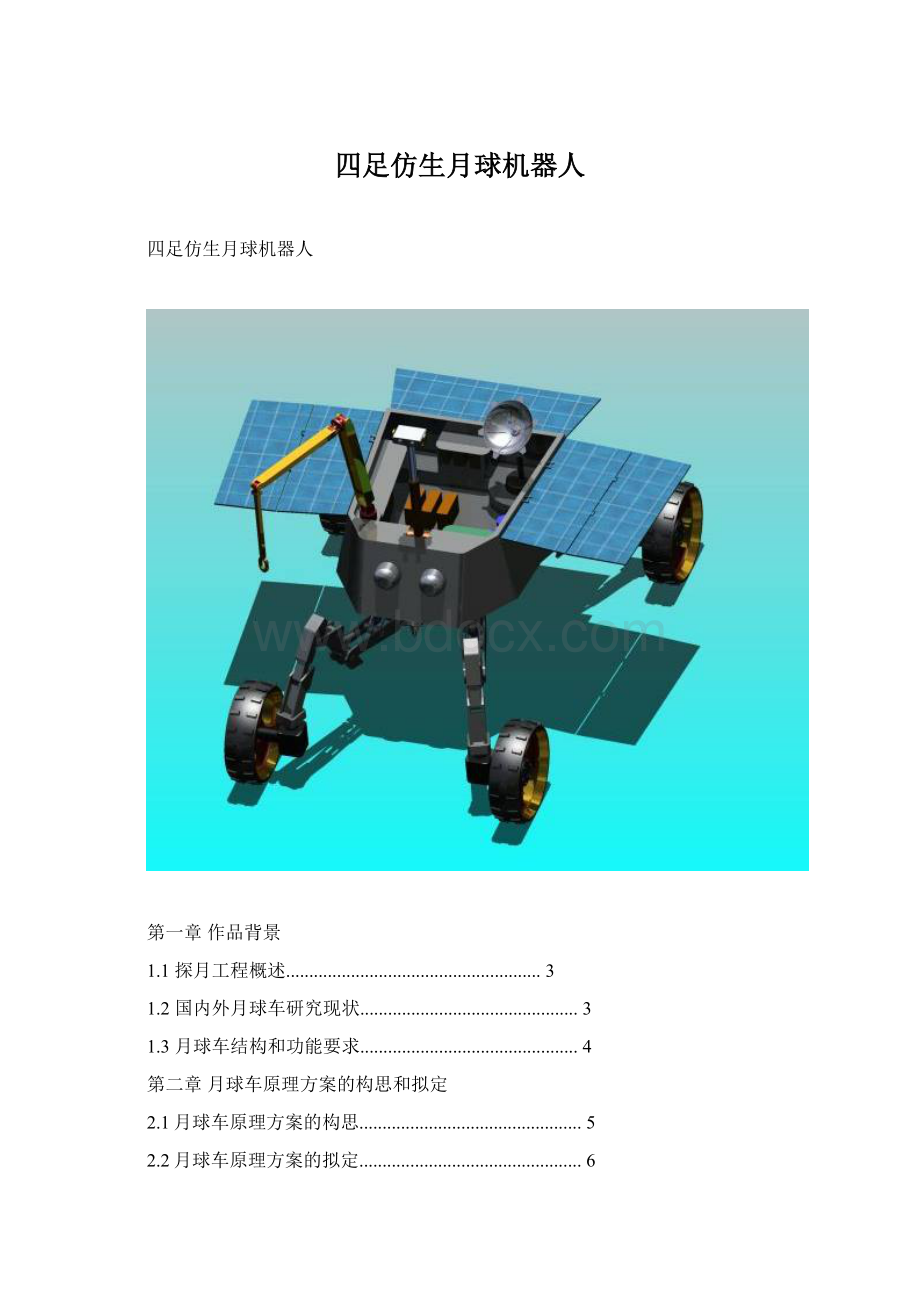
四足仿生月球机器人
四足仿生月球机器人
第一章作品背景
1.1探月工程概述.......................................................3
1.2国内外月球车研究现状...............................................3
1.3月球车结构和功能要求...............................................4
第二章月球车原理方案的构思和拟定
2.1月球车原理方案的构思................................................5
2.2月球车原理方案的拟定................................................6
第三章月球车各结构设计和原理分析
3.1展开机构设计........................................................7
3.2行走机构设计
3.2.1几种越障方式比较...............................................7
3.2.2方案拟定和结构设计.............................................8
3.2.3越障原理分析...................................................9
3.3采样机构设计
3.3.1车前探钻结构设计...............................................12
3.3.2机械手结构设计.................................................12
3.4能源供应与通讯系统
3.4.1太阳能电池板...................................................14
3.4.2雷达天线.......................................................15
3.5指向机构............................................................15
第四章参数分析
4.1基本测量
4.1.1收缩状态.......................................................16
4.1.2展开状态.......................................................17
4.2液压缸行程参数分析..................................................18
4.3机械手主要尺寸......................................................18
4.4材料选择............................................................18
第五章主要创新点和应用前景
5.1主要创新点..........................................................19
5.2应用前景............................................................19
第六章作品展示........................................................20
第一章作品背景
1.1探月工程概述
1958—1976年,美国与前苏联一共发射了83个无人月球探测器。
1969年,“阿波罗11号”实现了人类登月之梦,在月球探测中取得最辉煌成果。
这一年,先后有12名宇航员踏上月球,并向地面带回440公斤的月岩样品。
1972年,美国“阿波罗计划”结束。
欧空局第一个月球探测器“智慧1号”(SMART-1)已于2005年1月进入绕月轨飞行,开始探月,该探测器采用了多项新技术。
印度于2007年发射无人宇宙飞船,对月球进行首次科学探测,将2015年之前实现宇航员登月。
日本计划于2006年首次发送月球探测卫星,练习和掌握月球软着陆技术。
嫦娥工程,是中国启动的第一个探月工程,该工程于2003年3月1日正式启动。
首先是发射绕月卫星,继而是发射无人探测装置,实现月面软着陆探测,最后送机器人上月球建立观测点,并采回样本到地球。
整个计划将历时20年。
嫦娥三号将于2013年发射,并将“中华牌”月球车送上月球。
1.2国内外月球车研究现状
世界各国开发和研制星球探测车系统已经有多年的历史,特别是美国在这方面已有成熟的经验。
“索杰纳”由美国喷气推进实验室在原有“洛基”系列车的基础上改进而成,于1997年7月发射到火星表面上,在“火星探路者”的可视范围之内,进行科学和技术实验。
其质量为11.5kg,外型尺寸为60cm×40cm×35cm。
“勇气号”火星探测器是美国国家航空航天局火星探测漫游者计划的第一部火星漫游车,于2003年6月10日发射升空,其主要任务是探测火星上是否存在水和生命,并分析其物质成份,以推断火星能否通过改造适合生命生存。
除此之外还有:
“现场集成设计与运行车”(FIDO)、“流浪者”、“纳漫游车”、微”5等一系列行星车。
为了迎接国际航天科技的挑战,中国于2003年3月1日正式启动了的第一个探月工程——嫦娥工程,整个计划将历时20年。
嫦娥三号将于2013年发射,并将“中华牌”月球车送上月球。
在国内,以航天科技集团公司北京控制工程研究所、清华大学、哈尔滨工业大学等科研机构和大学,相继开展了有关月球探测及遥科学方面的研究工作。
北京控制工程研究所承担了“月球表面探测机器人方案研究”863项目,运用“虚拟样机”技术构造了虚拟月面计算机仿真环境,对月球表面探测机器人的动力学特性进行了分析和仿真研究,目前,已取得了很好的成果。
清华大学在月球表面环境及月球车几何建模方面做了大量的工作,并对所采用的电机进行了一定的研究。
国防科学技术大学贺汉根教授领导的研究小组以“索杰纳”为蓝本,研制了KDR-1试验样车,对自主导航及路径规划技术进行了研究。
哈尔滨工业大学针对深空探测成立了“深空探测基础研究中心”,积极启动了月球探测的研究工作,并取得了可喜的研究成果。
1.3月球车结构和功能要求
(1)由于月球表面恶劣的地形环境,月球车必须具有性能优越、自适应能力强的行走机构,和灵活的越障、避障能力以便在月球表面探测区域正常行走。
(2)为了在月面完成岩层钻探和采样任务,月球车要有优化设计的臂手机构。
(3)月球车的驱动可采用各种形式的原动机,月球车前进方式主要有足式移动、履带式移动和轮式移动三种方式;登陆月面常用软着陆方式。
(4)为保证月球车正常工作,必须设计通讯系统,如雷达天线、舱内控制设备等结构设计,采用无线遥控方式,并能实时传送图像。
(5)利用太阳能电池板产生和储存能源,为月球车提供动力。
(6)为保证保证能源和通讯系统的工作,应设计高效的指向机构,如高清相机等。
(7)此外,月球车要满足体积小、低功耗、重量轻、机构可靠等要求,还应设计展开机构(航天器的一般要求)。
第二章月球车原理方案的构思和拟定
2.1月球车原理方案的构思
模仿月球车的基本功能和结构设计思路,设计可完成规定动作的月球车,并完成月球车的三维建模。
运用AutodeskInventor三维建模软件进行实体造型,再对所设计月球车进行模拟装配,并完成运动仿真。
此外,对某些重要的关键零件进行原理分析、参数确定和二维工程图的绘制。
(1)展开机构
月球车软着陆后,通过活塞杆与液压缸配合、铰链约束等实现自动展开太阳能电池板、摄像头、通讯雷达天线、行走机构和机械手等结构。
(2)行走机构
根据月球车行走机构设计要求,首先要求的功能是行走和越障能力。
行走和越障时,需要摄像头灯光辅助,以便获取准确路况信息,控制系统对路况进行识别分析,指挥小车做出相应越障动作。
考虑到必须具有性能优越、自适应能力强、灵活的行走越障能力等功能,初步设想月球车为轮式移动方式,
(3)采样机构
为完成采样任务,采样机构主要由机械手和车前探钻组成,分别实现岩层钻取和样本采集功能。
为了实现岩层钻取,需要在小车前端加装钻头。
机械手应该拥有足够自由度,能够轻松拾取样本,而且抓取的力度应该适当,不能破坏样本。
(4)能源供应与通讯系统
必须安装太阳能电池板,能够自动展开和调整角度,保证最大向阳面积,最大限度实现能源自给自足。
通讯系统必须拥有较高的可靠性,能过实时传播控制信号和视频信息,初步设计为可调高度和角度的雷达天线。
(5)指向机构
主要由高清全景相机和前灯组成。
利用桅杆的升降、旋转实现高清全景相机的旋转、俯仰、定位等功能;前灯为月球车行动提供照明。
综合以上初步设想,设计的月球车可实现以下功能:
自身展开,能量自给,行走越障,钻探取样。
2.2月球车原理方案的拟定
设计的月球车主要包括展开机构、行走机构、采样机构、能源供应与通讯系统、指向机构等5部分组成,此外还有舱体、舱内控制设备等。
如图2-1所示。
图2-1探索号月球车结构图
第三章月球车各结构设计和原理分析
3.1展开机构设计
展开机构是月球车上十分重要的机构之一,是其他机构的重要组成部分,也是月球车从发射到展开正常工作的必要保证。
因此,展开机构在月球车上有多处应用。
如图3-1所示,为月球车上几种常用机构的展开结构。
(a)(b)
(c)(d)
图3-1常用展开结构
图(a)的行走机构和图(b)中的指向机构主要通过液压系统和铰链连接来实现展开的;图(c)的太阳能电池板主要通过铰链连接;图(d)的机械手是通过铰链关节来实现收缩和展开状态,完成多自由度运动。
3.2行走机构设计
3.2.1几种越障方式比较
目前,月球车的移动方式主要有足式移动、履带式移动和轮式移动三种方式。
履带式移动系统具有良好的越障性能,较强的适应性和使用寿命,履带式越障对于障碍的要求极低,越障碍的能力极强,而且具有良好的爬坡性能,适合在崎岖的地面行驶,其适应范围广,运动效率高。
其缺点是灵活机动性差,适应性弱,履带式移动系统的机构可能复杂,运动分析及控制可能较困难。
轮式移动系统在相对平坦的地形中具有相当的优势,同足式移动系统相比,其控制也较简单,目前大多数倾向于将行星探测车的移动系统设计成轮式机构。
轮式移动运动迅速平稳,尽管其比较适合平缓的环境,越障能力较差,但合适的悬架系统来使其适应凹凸不平的地形需巧妙的设计。
轮式越障的优点是相比其它越障方式效率高,但是其有一个很大的缺陷就是适应能力差,对环境要求高。
足式移动系统越障具有适应能力最强的特点,可以通过关节的变形达到多种效果,越障碍的能力也极强,但是其缺点在于其移动速度慢,结构复杂,行驶速度缓慢,且行走过程中对车身冲击较大。
其控制复杂,相关技术不太成熟,越障效率在以上三者之间是最差的。
3.2.2方案拟定和结构设计
通过以上综合分析,拟采用机械足和轮子结合的方式(如图3-2所示),既可提高月球车的越障能力,又保证了运动迅速、行走平稳的功能要求。
行走和越障时,需要摄像头灯光辅助,以便获取准确路况信息,控制系统对路况进行识别分析,指挥小车做出相应越障动作。
4个电机通过协调控制登月小车左右两侧的驱动车轮,采用控制系统控制电机和机械足的角度实现转向运动,从而方便地实现水平地面上的各种运动。
图3-2行走机构整体图
3.2.3越障原理分析
如图3-3、图3-4所示是月球车的行走机构局部图,由于采用可控直流变速电机,所以不用再设计减速齿轮箱,进而减轻了月球车的重量,改善了其内部机构。
4个可控直流变速电机安装在机械足末端,并与车轮相连,直接驱动月球车运动。
4个电机的之间的相互配合,可以使转弯半径大为减少,可在原地实现360度回转,大大的提高躲避障碍的能力。
足部驱动组件
图3-3行走机构局部图一
液压缸1
液压缸4
液压缸2
液压缸3
图3-4行走机构局部图二
在足式结构上配有液压控制系统,机械足各零件之间靠铰链相连,通过液压缸控制各个足段的相对位置关系。
当遇到障碍时,控制4个液压缸的压缩或伸长,可控制车轮抬高或降低(如图3-5所示),完成跨越障碍动作。
图3-5越障演示
常用动作程序如下表3-1所示:
表3-1液压缸动作和机械足轮子状态程序表(常用)
液压缸的状态(+为伸长,—为压缩,O为不变)
机械足轮子状态(á为升高,â为降低)
1
2
3
4
—
—
—
—
á
+
+
+
+
â
O
O
—
—
á
O
O
O
—
á
O
O
+
+
â
O
O
O
+
â
3.2.4转向运动分析
如图3-6所示,4个可控变速电机安装在机械足末端,并与车轮相连,采用控制系统控制电机和机械足的角度实现转向运动,4个电机的之间的相互配合,可以使转弯半径大为减少,可实现原地360度回转。
图3-6原地360度回转
如图3-7所示,通过控制足部驱动组件与舱体的角度,可完成机械足和车轮的内合与外张运动,进而实现月球车在较窄路段的正常行走。
图3-7足部驱动组件内合状态
3.3采样机构设计
为完成采样任务,采样机构主要由机械手和车前探钻组成,分别实现岩层钻取和样本采集功能。
为了实现岩层钻取,需要在小车前端加装钻头。
机械手应该拥有足够自由度,能够轻松拾取样本,而且抓取的力度应该适当,不能破坏样本。
3.3.1车前探钻结构设计
为了获取岩层以下的样本,在车身前下部安装钻头。
双级液压缸结构,可使钻探时获得较大的下压力。
如图3-8所示,在钻探时,第一级液压缸伸出,二级液压缸随后伸出,钻头开始旋转工作,完成岩层钻取。
钻头
图3-8车前探钻
3.3.2机械手结构设计
机械手主要为了实现样本采集功能
钻头
,在完成钻孔任务后,机械手展开拾取样本。
如图3-9所示,为机械手收缩时的状态,可节约较大空间。
如图3-10机械手展开状态,主要由3个机械手连杆、3个机械手关节和机械指组成。
机械连杆和机械指通过控制系统来调节其与各关节的运动。
机械手拥有4个自由度,每个关节之间可以独立运动,机械手爪可通过控制系统在较大的范围内调整夹紧力和展开角度,并且保证适当的抓取力,能够轻松拾取样本而不破坏样本。
图3-9机械手收缩状态
图3-10机械手展开状态
图3-11机械手安放样本
如图3-11所示,在完成样本拾取后,将样本取回放在舱内的样本收集区,然后回归收缩时的状态。
3.4能源供应与通讯系统
3.4.1太阳能电池板
如图3-12(展开状态)所示,能源供应由5块太阳能电池板实现,左右各2块太阳能电池板和1块后太阳能电池板可自由展开。
后太阳能电池板还可横向旋转,以适应太阳能强度,如图3-13所示。
图3-12太阳能电池板展开状态
图3-13后太阳能电池板横向旋转
3.4.2雷达天线
如图3-14所示,雷达天线可实现升降、全方位旋转等功能,以获得良好的传输信道和角度。
图3-14雷达天线
3.5指向机构
如图3-15所示,主要由高清全景相机和前灯组成。
车前部设有两个先进的LED照明灯,为月球车行动提供照明。
多自由度额高清全景相机,可以进行全方位拍照和摄像,利用桅杆的升降、相机支架旋转可实现高清全景相机的旋转、俯仰、定位等功能,增大了视察范围和导航功能。
图3-15指向机构
第四章参数分析
4.1基本测量
所有基本测量值均在三维模型装配后测得,实际设计尺寸约为标注尺寸的2倍。
4.1.1收缩状态
主、左视图测量分别如图4.1(a)、(b)所示:
(a)
(b)
图4.1收缩状态的主、左视图测量
4.1.2展开状态
主、俯视图测量分别如图4.2(a)、(b)所示:
(a)
(b)
图4.1展开状态的主、俯视图测量
4.2液压缸行程参数分析
参考图3-4行走机构局部图二,并结合表3-1的液压缸工作程序表,根据所绘三维数字化模型得出各液压缸行程(标注尺寸)如下表所示。
表4-1行走机构液压缸行程
1
2
3
4
液压缸行程(mm)
11
23
32
15
4.3机械手主要尺寸
机械手3个连杆及各关节的主要尺寸见三维模型和相应零件图。
4.4材料选择
各主要零部件的材料选择和成本估计如下表所示:
表4-2主要零部件材料选择和成本估计
零部件
材料/重要组成
质量(Kg)
成本估计(RMB)
主舱体
航空合金钢
10
1000000.00
太阳能电池板
多晶硅
1
2500000.00
车轮
航空合金钢
1.6
1600000.00
液压缸及活塞杆
航空合金钢
1.6
1600000.00
钻头
金刚石
0.05
5000000.00
蓄电池
银锌蓄电池
2.5
100000.00
可控变速电机
直流伺服电机
2
400000.00
机械手
航空合金钢
1
1800000.00
其它
高清全景相机、雷达天线、控制设备等
5
80000000.00
合计
24.75
94000000.00
第五章主要创新点和应用前景
5.1主要创新点
本作品主要创新点有以下几个方面:
1.原理创新:
(1)利用了仿生学原理,模仿四足爬行动物的足式结构,设计了机械足式与轮式相结合的行走机构,既可提高月球车的越障能力,又保证了运动迅速、行走平稳的功能要求。
(2)将液压系统原理充分应用于月球车的行走、展开、采样、指向等多个机构中,可大大提高机构效率,节约尺寸空间。
2.机构创新:
(1)可控直流电机安装在机械足末端,通过控制电机和机械足的角度,可实现转向运动、原地360度回转等多种运动方式。
(2)通过控制足部驱动组件与舱体的角度,可完成机械足和车轮的内合与外张运动,进而实现月球车在较窄路段的正常行走,大大提高了越障能力。
(3)多自由度采样机械手和车前探钻的设计,可有效完成采样任务。
(4)展开机构通过液压缸、铰链关节等来实现收缩和展开状态,是其他机构正常工作的必要保证。
5.2应用前景
1.航天方面:
根据月球微重力、月面条件差等特点,采用新型四足仿生和轮式相结合的行走方式,可给登月车的设计和制造提供一些灵感。
2.工业方面:
野外地形复杂多变,而且环境较差,可以利用研发此探测车在人不得参与的环境里进行探测、采矿、运输等活动。
3.娱乐方面:
可以利用此车良好的越障性和运动多样性,设计成微型遥控玩具车,可有良好的市场前景。
第六章作品展示
 升级会员
升级会员 