第五章3节及习题.docx
《第五章3节及习题.docx》由会员分享,可在线阅读,更多相关《第五章3节及习题.docx(21页珍藏版)》请在冰豆网上搜索。
第五章3节及习题
5.3平面凸轮轮廓设计
当凸轮机构的类型、基本尺寸、凸轮转向和推杆的运动规律确定后,即可进行凸轮轮廓曲线的设计。
凸轮廓线的设计方法有图解法和解析法,它们所依据的基本原理都是相同的。
本节首先介绍平面凸轮轮廓设计的基本原理,然后将图解法和解析法的设计方法分别予以介绍。
5.3.1平面凸轮轮廓设计的基本原理
平面凸轮轮廓设计所依据的基本原理就是反转法原理。
下面以对心直动尖顶推杆盘状凸轮机构为例来说明反转法的原理。
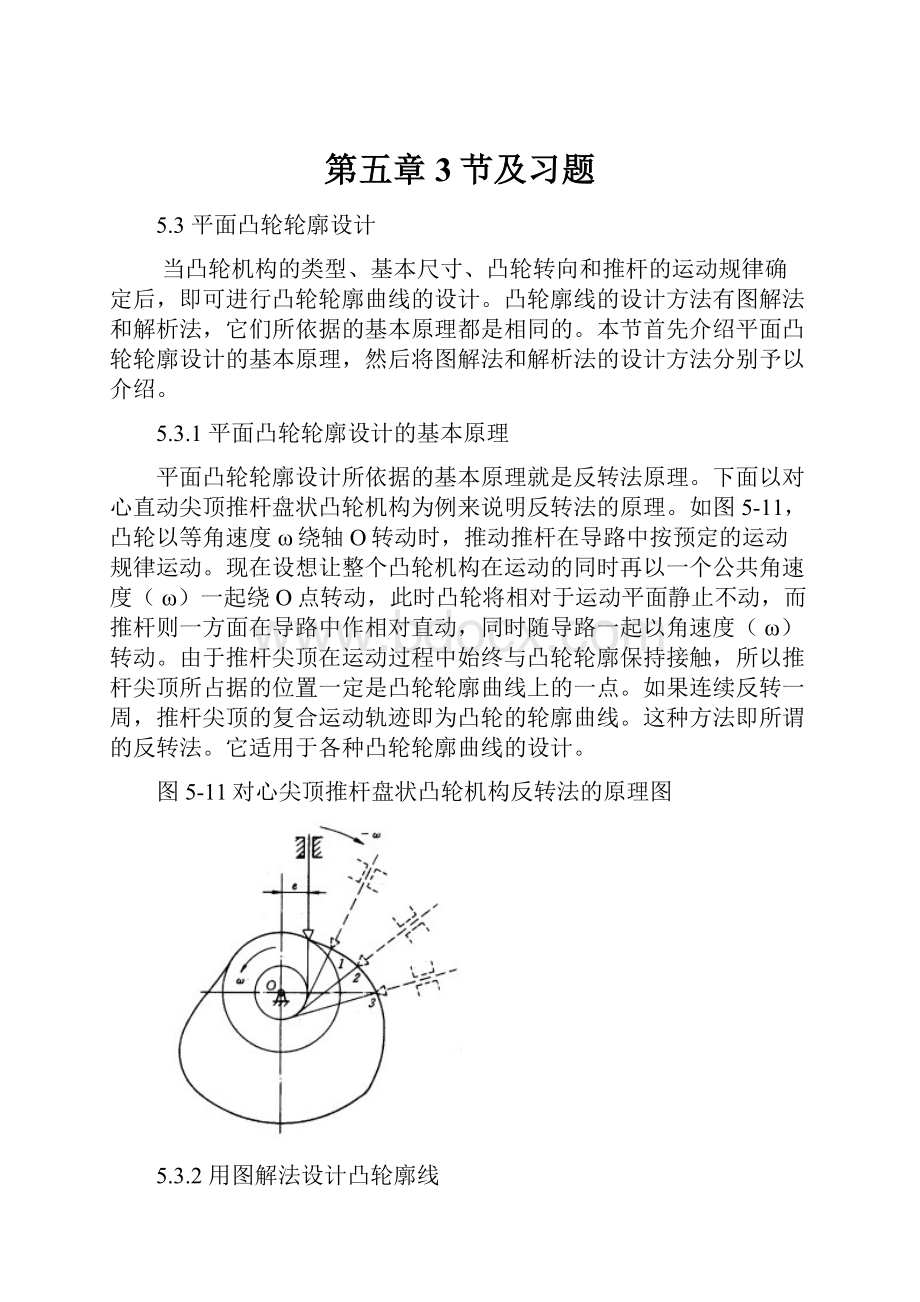
如图5-11,凸轮以等角速度ω绕轴O转动时,推动推杆在导路中按预定的运动规律运动。
现在设想让整个凸轮机构在运动的同时再以一个公共角速度(ω)一起绕O点转动,此时凸轮将相对于运动平面静止不动,而推杆则一方面在导路中作相对直动,同时随导路一起以角速度(ω)转动。
由于推杆尖顶在运动过程中始终与凸轮轮廓保持接触,所以推杆尖顶所占据的位置一定是凸轮轮廓曲线上的一点。
如果连续反转一周,推杆尖顶的复合运动轨迹即为凸轮的轮廓曲线。
这种方法即所谓的反转法。
它适用于各种凸轮轮廓曲线的设计。
图5-11对心尖顶推杆盘状凸轮机构反转法的原理图
5.3.2用图解法设计凸轮廓线
1.直动推杆盘状凸轮机构中凸轮廓线的设计
(1)直动尖顶推杆盘状凸轮机构已知凸轮的基圆半径r0,偏心距为e。
当凸轮以等角速度ω沿逆时针方向转动时,推杆的位移曲线如图5-12b所示。
试设计一偏置直动尖顶推杆盘状凸轮机构。
下面以推程为例,讨论按照反转法原理设计直动尖顶推杆盘状凸轮轮廓曲线的方法:
1)将位移曲线的推程运动角进行等分,得各个等分点的位移
、
、…。
2)选取与位移线图相同的比例尺,以O为圆心,以r0为半径作凸轮的基圆,以e为半径作偏心距圆,并选定推杆的偏置方向,画出推杆的导路位置线,并与偏心圆切与KA点。
与基圆的交点A是推杆尖顶的初始(最低)位置。
3)自KA点开始,沿(-ω)方向量取推程运动角并进行相应的等分,得到基圆上的各个等分点K1、K2、…。
过各等分点作偏心距圆的切线(当e=0时,直接将各个等分点与基圆圆心O相连),这些切线(或连线)即是推杆在反转过程中的的导路位置线。
4)在偏心距圆的切线(e=0时为连线)上,从基圆起向外截取线段,使其分别等于位移曲线中相应的等分点位移,即
,
…,这些点即代表反转过程中推杆尖顶依次占据的位置
、
…。
5)将点
、
…连成光滑的曲线,即得所求的凸轮在推程部分的轮廓曲线。
同样可以作出凸轮在回程部分的轮廓曲线,而远程休止和近程休止的轮廓曲线均为以O为圆心的圆弧。
(2)直动滚子推杆盘状凸轮机构对于直动滚子推杆盘状凸轮机构的凸轮轮廓曲线设计,具体作图步骤如下:
1)如图5-13所示将滚子中心A作为尖顶推杆的尖顶,按照上述方法作出反转过程中滚子中心A的运动轨迹,我们称它为凸轮的理论廓线。
2)在理论廓线上取一系列的点为圆心,以滚子半径rr为半径,作一系列的滚子圆,再作此滚子圆族的内包络线,它就是凸轮的实际廓线(或称为凸轮的工作廓线)。
应该注意的是:
实际廓线和理论廓线是法向等距曲线,其距离为滚子半径;作滚子圆族的包络线时,根据工作情况,可能作其内包络线,也可能作其外包络线或同时作其内、外包络线;在滚子推杆盘状凸轮机构的设计中,基圆半径r0是针对理论廓线而言的。
图5-13直动滚子推杆盘状凸轮轮廓曲线设计
图5-14直动平底推杆盘状凸轮轮廓曲线设计
(3)直动平底推杆盘状凸轮机构如图5-14所示平底推杆盘状凸轮机构凸轮轮廓曲线的设计方法,与滚子推杆盘状凸轮机构相似,具体设计步骤如下:
1)将平底与导路中线的交点A作为尖顶推杆的尖顶,按照尖顶推杆盘状凸轮的设计方法,求出尖顶反转过程中的一系列位置
、
、…。
2)过
、
、…各点,作出各点处代表平底的直线,这一直线族就是推杆在反转过程中平底依次占据的位置。
3)作该直线族的包络线,即可得到凸轮的实际廓线。
如前所述,平面移动凸轮机构是平面盘状凸轮机构的一种特例,即移动凸轮机构可以看做是回转中心在无穷远处的盘状凸轮机构。
所以二者的设计过程相似。
由于移动凸轮回转中心在无穷远处,因此,机构反转法变成了机构反向移动法。
2.摆动从动件盘状凸轮机构中凸轮廓线的设计
图5-15a所示为一摆动尖顶从动件盘状凸轮机构。
已知凸轮的基圆半径为r0,推杆长度为l,推杆的回转中心A与凸轮回转中心O的中心距为a,摆杆的最大摆角为φ,凸轮以等角速度ω逆时针转动,推杆的运动规律如图5-15b所示。
以推程为例说明用反转法原理设计凸轮轮廓曲线的方法。
a)b)
图5-15摆动尖顶推杆盘状凸轮廓线的设计
1)将推程位移曲线的横坐标进行等分,得各个等分点的角位移j1、j2、…。
2)根据给定的中心距a确定O、A的位置,以O点为圆心、以r0为半径作基圆,以A点为圆心,以推杆杆长l为半径作圆弧,交基圆于B点(一般情况下,凸轮的转向与摆杆升程时的转向应相反,这样受力较好)。
AB即代表推杆的初始位置。
3)以O为圆心,以a为半径画圆,自A点开始沿(ω)方向量取推程运动角并进行相应的等分,得到各个等分点A1、A2、…,它们代表反转过程中推杆转轴A依次占据的位置。
4)以各等分点为圆心,以推杆杆长l为半径画弧,交基圆于B1、B2…各点,则线段A1B1、A2B2…为推杆反转过程中在各等分点的最低位置,以A1B1、A2B2…为一边,分别量取各自的角位移j1、j2、…,得线段A1B1‘、A2B2‘…。
它们代表反转过程中推杆所依次占据的位置。
点B1‘、B2‘…即为反转过程中推杆尖顶的运动轨迹。
5)将点B1‘、B2‘…依次连成光滑曲线,即得所求的凸轮在推程部分的轮廓曲线。
同样可以作出凸轮在回程部分的轮廓曲线,而远程休止和近程休止的轮廓曲线均为以O为圆心的圆弧。
若采用摆动滚子或平底推杆,与直动滚子或平底推杆相似,先求理论廓线,再求实际廓线。
5.3.3用解析法设计凸轮廓线
随着机械不断朝着高速、精密、自动化方向发展,计算机和各种数控加工机床在生产中的广泛应用,用解析法设计凸轮廓线越来越广泛地应用于生产实践中。
解析法设计凸轮廓线根本问题将所求出的凸轮廓线用数学方程式来表示。
下面介绍几种常用凸轮机构的解析法设计方法。
1.直动滚子推杆盘状凸轮机构中凸轮轮廓曲线的设计
图5-16偏置直动滚子推杆盘状凸轮机构
P
图5-16所示为一偏置直动滚子推杆盘状凸轮机构。
过凸轮的回转中心O建立图示直角坐标系xOy。
B0点为推杆滚子中心在推程阶段的起始位置。
当凸轮转过d角度时,推杆的位移为s。
根据反转法原理作图可知,滚子中心应处于B点,该点的直角坐标为
式中e为偏心距。
式(5-10)即为凸轮理论廓线的方程式。
若为对心直动推杆,则e=0,s0=r0。
另外,e的值为代数值,其正负作如下规定:
当凸轮沿逆时针方向转动时,若推杆位于凸轮转动中心的右侧,e的值为正,反之为负;当凸轮沿顺时针方向转动时,若推杆位于凸轮转动中心的左侧,e的值为正,反之为负。
我们知道实际廓线与理论廓线为等距曲线,且在法线方向的距离等于滚子半径rr。
所以当已知理论廓线上任一点B的坐标(x,y)时,只要沿理论廓线在该点的法线方向取距离rr,即可得到实际廓线上相应点B‘的坐标值(x‘,y‘)。
由高等数学可知,曲线上任一点的法线斜率与该点的切线斜率互为负倒数,故理论廓线上B点处的法线nn的斜率为
其中
由以上两式可得
由图5-16可以看出,实际廓线上对应点B‘的坐标可由下式求出
此即凸轮实际廓线的方程式。
式中“+”号用于外包络廓线,“-”号用于内包络廓线。
2.直动平底推杆盘状凸轮机构中凸轮轮廓曲线的设计
图5-17所示为一对心直动平底推杆盘状凸轮机构。
以凸轮的回转中心O为原点,推杆的导路中心为y轴建立直角坐标系xOy。
当推杆处于起始位置时,平底与凸轮廓线切于B0点;当凸轮转过d角度时,推杆的位移为s。
根据反转法可知,平底与凸轮轮廓切于B点。
其坐标(x,y)为
图5-17直动平底推杆盘状凸轮机构
由三心定理可知,P点为推杆与凸轮的瞬心,故推杆在该瞬时的运动速度为
或
可得B点的坐标(x,y)即凸轮实际廓线的方程式为
3.摆动滚子推杆盘状凸轮机构中凸轮轮廓曲线的设计
图5-18所示为一摆动滚子推杆盘状凸轮机构。
已知凸轮转动轴心O与摆杆摆动轴心A0之间的中心距为a,摆杆长度为l,以凸轮的回转中心O为原点,OA0为y轴,建立直角坐标系xOy。
当摆杆处于起始位置时,滚子中心处于B0点,摆杆与连心线OA0间的夹角为j0;当凸轮转过d角度后,推杆摆角为j。
由反转法可知,此时滚子中心将处于B点。
其坐标(x,y)即凸轮理论廓线方程为
凸轮实际廓线方程的推导思路与直动滚子推杆盘状凸轮机构相同,不再赘述。
图5-18摆动滚子推杆盘状凸轮机构
例5-1如图5-19(a)所示为一移动滚子盘形凸轮结构,滚子中心位于点
时为该凸轮的起始位置。
试求:
(1)当滚子与凸轮廓线在点
接触时,所对应的凸轮转角
。
(2)当滚子中心位于点
时,所对应的凸轮机构的压力角
。
(a)(b)
图5-19
解:
(1)利用反转法求解步骤如下:
1正确作出偏心圆,如图5-19(b)所示。
2用反向包络线法求出在点
附近凸轮的部分理论廓线
。
具体方法为:
以凸轮实际廓线上点
附近的各点为圆心,以滚子半径作一系列滚子圆,然后作这些滚子圆的外包络线,即得理论廓线
,如图5-19(b)所示。
3过点
正确作出凸轮廓线的法线nn,该法线交
于
点,
、
两点间的距离等于滚子半径
。
点
即为滚子与凸轮在点
接触时滚子中心的位置。
4过点
作偏心圆的切线,该切线即为滚子与凸轮在点
接触时从动件的位置线,该位置线与从动件起始位置线间的夹角,即为所求的凸轮转角
。
(2)在图5-19(b)中,已知凸轮廓线,利用反转法求解步骤如下:
1过点
正确作出偏心圆的切线,该切线代表在反转过程中,当滚子中心位于点
时从动件的位置线,如图5-19(b)所示。
2过点
正确作出凸轮廓线的法线nn,该法线必通过滚子中心
,同时通过滚子与凸轮廓线的切点即滚子中心与凸轮廓线圆的连心线,它代表从动件的受力方向线。
3该法线与从动件位置线间所夹的锐角,即为机构在该处的压力角
。
5.4凸轮机构基本尺寸设计
我们前面在讨论凸轮轮廓曲线设计时,除了根据工作要求选定推杆的运动规律外,还预先给定了凸轮机构的一些基本参数,如基圆半径r0、偏距e、滚子半径rr等。
而实际上这些参数都是未知量,需要设计者来确定。
这些参数的选择除了保证推杆能够准确地实现预期的运动规律外,还关系到机构的受力情况是否合理、结构是否紧凑等。
如果这些参数选择不当,将会引起一系列问题。
所以本节来讨论凸轮机构基本尺寸的设计方法。
5.4.1凸轮机构的压力角及其许用值
凸轮机构的压力角是指在不计摩擦的情况下,凸轮对推杆作用力的方向线与推杆上力作用点的速度方向之间所夹的锐角α。
它是衡量凸轮机构传力特性的一个重要参数。
下面主要讨论一下压力角对作用力、机构尺寸的影响。
1.凸轮机构的压力角a
图5-20所示为一凸轮机构在某一位置时的受力情况,其中凸轮对推杆的作用力为P,推杆承受的载荷为G,导路对推杆的反力为Fr1、Fr2,j1、j2分别为凸轮与推杆、推杆与导轨之间的摩擦角,a为凸轮机构在图示位置的压力角,即推杆所受正压力的方向(凸轮轮廓区现在接触点处的法线方向)与推杆受力点B的速度方向之间所夹的锐角。
根据力的平衡条件可得
整理后可得
图5-20凸轮机构在某位置时的受力图
F
Fr2
Fr1
由上式分析可知:
在同样情况下,压力角a越大,分母的值越小,凸轮对推杆所施加的作用力P就越大;当压力角a增达到一定值后,分母将为零,这时无论凸轮给推杆的作用力P有多大,都不能推动推杆运动,即机构将发生自锁,此时的压力角称为临界压力角ac。
因此,为减小推力,避免自锁,改善机构的受力状况,应首先保证机构的最大压力角amax另外,临界压力角ac的值还与凸轮机构的几何尺寸有关,增大导轨长度、减小悬臂尺寸都将增大临界压力角ac的值。
2.凸轮机构的许用压力角[a]
在一般情况下,凸轮机构的传力特性和机构的紧凑性是互相制约的(见“二、凸轮基圆半径的确定”),因此,在设计凸轮机构时,应统筹考虑。
实践证明,当最大压力角amax接近临界压力角ac时,虽然机构未发生自锁,但是所需的驱动力急剧增加,导致机构的效率下降、工作条件恶化。
因此,在实际应用中,一般规定一个压力角的许用值[a],且[a]远小于临界压力角ac,在保证amax≤[a]的前提下,尽可能选取较小的基圆半径。
根据工程实践的经验,推荐推程的许用压力角为:
移动推杆,[a]=30°~38°,当要求凸轮尺寸尽可能小时,可取[a]=45°;摆动推杆,[a]=40°~45°。
回程时,由于推杆通常受力较小无自锁问题,故许用压力角可取得大些,通常取[a]=70°~80°。
5.4.2凸轮基圆半径的确定
当凸轮机构的类型选定后,压力角a的值与推杆的运动规律和机构尺寸有关。
当推杆的运动规律选定后,基圆半径愈大,机构最大压力角amax的值越小,传力效果越好,但凸轮机构的尺寸也愈大,浪费空间和材料。
基圆半径愈小,虽然凸轮机构的尺寸紧凑,但机构最大压力角amax的值增大,传力效果较差。
下面以图5-21为例加以说明。
图5-21直动推杆盘形凸轮机构
在图5-21的直动推杆盘状凸轮机构中,根据速度瞬心知识参照式(5-15)有
由图5-21中∆BCP可得
(5-20)
由上式可知:
当凸轮机构的偏心距和推杆的运动规律确定后,增大基圆半径,可减小机构的最大压力角amax,从而提高传力效果,但凸轮机构的尺寸将随之增大,因此,应合理选择基圆半径的大小,既保证凸轮机构的尺寸不会过大,又保证机构的最大压力角amax≤[a]。
根据许用压力角条件amax≤[a]可知,凸轮机构的最小基圆半径可由下式求得
(5-21)
值得注意的是:
第一,根据式(5-21)求r0min时,随ds/dδ的不同而不同,需要确定基圆半径的极值,给实际应用带来不便;第二,由此求出的r0min的值一般比较小,有可能无法满足凸轮的结构和强度等方面的要求。
因此,在实际工作中,一般都是先根据具体情况预选一个凸轮的基圆半径,待凸轮轮廓曲线设计完成后,再检查其最大压力角是否满足amax≤[a];当凸轮与轴加工成凸轮轴时,凸轮廓线的最小向径应略大于凸轮轴的直径。
当凸轮与轴分别制造时,凸轮廓线的最小向径应大于凸轮轮毂的直径。
一般情况下,凸轮廓线的最小向径应大于凸轮轴径的(1.6~2)倍。
5.4.3滚子半径的选择
如前所述,当选用滚子推杆时,盘状凸轮的实际廓线是理论廓线等距曲线。
因此,凸轮实际廓线的形状与滚子半径的大小有关。
在选择滚子半径时,应综合考虑滚子的结构、强度及凸轮轮廓形状等因素,分析凸轮实际廓线形状与滚子半径的关系。
图5-22a所示为内凹的凸轮轮廓曲线,粗实线a为实际廓线,点画线b为理论廓线。
实际廓线的曲率半径ρa等于理论廓线的曲率半径ρ与滚子半径rr之和,即ρa=ρ+rr,因此,无论滚子半径大小如何选择,都可以根据理论廓线作出圆滑的实际廓线。
但是,对于外凸的凸轮廓线,实际廓线的曲率半径ρa等于理论廓线的曲率半径ρ与滚子半径rr之差,即ρa=ρ-rr。
当ρ>rr时,ρa>0(如图5-22b所示),实际廓线可以准确的作出;若ρ=rr时,ρa=0,实际廓线将出现尖点(如图5-22c所示),由于尖点处很容易磨损,故不能实际使用;若ρ由以上分析可知,凸轮机构产生运动失真的根本原因在于其理论廓线的最小曲率半径ρmin小于滚子半径rr,即ρmin-rr<0。
因此,为避免运动失真,可从两方面进行考虑:
一是减小滚子半径rr;二是增大理论廓线的最小曲率半径ρmin。
但是,减小滚子半径的同时,还应该考虑滚子的结构和强度,因此,滚子半径的值也不能太小,一般取滚子半径rr=(0.1~0.5)r0,另外,增大理论廓线的最小曲率半径ρmin,势必增大凸轮的基圆半径,从而增大凸轮机构的总体尺寸,因此,为了防止凸轮产生运动失真或过渡磨损,应保证凸轮实际廓线的最小曲率半径ρamin=ρmin-rr>3~5mm。
图5-22滚子半径与运动失真
用解析法设计凸轮机构时,通常是先根据结构和强度条件选择滚子半径rr,然后校核ρamin=ρmin-rr>3~5mm,若不满足,则应增大基圆半径重新设计。
5.4.4平底宽度的确定
对于平底推杆盘状凸轮机构,在机构在运转过程中,必须保证推杆的平底与凸轮廓线始终正常接触,因次,必须确定平底的宽度。
由式(5-16)
可知,凸轮与平底的接触点至平底中心的距离为
其中|ds/d|max应对推杆和回程的运动规律分别计算后,取二者的较大值。
为了确保推杆平底与凸轮廓线在任何位置都能正常接触及保证平底的对称性,平底的最小宽度应为
5.4.5推杆偏置方向的选择
为了方便起见,我们先分析一下压力角与偏心距、凸轮转动方向的关系。
图5-21所示的凸轮机构为推杆的导路位于凸轮回转中心的右侧,凸轮沿逆时针方向转动。
其推程运动的压力角如式(5-20)所示。
同样可以求出其回程运动的压力角为
也可以这样认为:
如果凸轮机构的偏心距为正,其推程运动的压力角如式(5-20)所示,其回程运动的压力角为式(5-23);如果凸轮机构的偏心距为负,则相反。
由此可见,压力角的大小及变化情况与偏心距的大小、偏置的方向及凸轮的转动方向有关,单纯的增大偏心距,其压力角有可能是减小也可能是增大,这取决于凸轮的转动方向和推杆的偏置方向。
需要指出的是,若推程压力角减小,则回程压力角将增大,反之亦然。
但是,由于规定推程的许用压力角较小而回程的许用压力角较大,所以在设计时,如果压力角超过了许用值、而机械的结构空间又不允许增大基圆半径,则可通过选取推杆适当的偏置方向来获得较小的推程压力角。
同样情况下,当凸轮机构的偏心距为正时,凸轮机构的推程压力角较小。
对于移动平底推杆盘状凸轮机构来说,偏心距e并不影响压力角的大小。
只是为了减小推杆所受的弯曲应力,使其受力合理。
识要点与拓展
本章主要介绍了凸轮机构的类型、特点、常用运动规律、凸轮轮廓及基本尺寸设计方法。
1.合理选择或设计推杆的运动规律,是凸轮机构设计的关健一步,它直接影响机构的运动特性和动力特性。
本章介绍了几种常用运动规律及其组合方法,应掌握各种运动规律的特点和适用场合。
但是,仅靠这几种运动规律远远不能满足工程实际的要求,为了获得更好的运动和动力特性,经常选择其它形式的运动规律,有关这方面的理论介绍可参考[32]、[57]等文献。
目前仍有学者在进行这方面的研究,探寻更好的运动规律。
2.在凸轮机构的设计方面,本章主要介绍了图解法和解析法,图解法简单、直观,同时它又是解析法的基础,应首先理解机构反转法的原理,并掌握其设计过程;解析法虽然解题过程繁琐,但精度高,并且它是计算机辅助设计的基础,解析法解题过程中数学模型的建立是至关重要的一步,必须掌握。
3.在设计凸轮机构时,基圆半径、滚子半径、压力角、偏心距的参数都是假定已知的,实质上都是未知量,需要设计者来确定。
如果参数选择不当,就可能造成压力角过大甚至机构的自锁和运动失真。
本章对此进行了介绍,应掌握由于参数选择不当可能造成的问题及应采取的对策。
尤其应注意基圆半径与压力角的关系及偏心距的大小和偏置方向对压力角的影响。
有关这方面的理论介绍可参考文献[2]。
4.本章在机构设计过程中一直把各构件视为刚体,不考虑弹簧及各构件弹性变形对运动的影响。
当凸轮转速较高或构件刚性较低时,构件的弹性变形的影响便不能忽略,此时应将整个机构看成是一个弹性系统,这就引出了高速凸轮机构的问题。
有关这方面的理论介绍可参考[58]等文献。
计算机辅助设计、优化设计在凸轮机构设计中也有应用,有关这方面的知识可参考[2]、[64]等文献。
思考与习题
5-1什么是凸轮机构?
它有那些优缺点?
凸轮机构是如何分类的?
5-2什么是推程运动角、回程运动角、近程休止角、远程休止角?
它们的度量起始位置分别是哪里?
5-3何谓推杆的运动规律?
为什么又经常将推杆的运动规律表示为凸轮转角d的函数?
常用的推杆运动规律有哪几种?
5-4何谓凸轮机构传动中的刚性冲击和柔性冲击?
并指出哪些运动规律有刚性冲击,哪些运动规律有柔性冲击?
哪些运动规律没有冲击?
5-5图解法和解析法各有何特点?
5-6什么是凸轮机构的压力角、基圆半径?
应如何选择它们的数值大小?
这对凸轮机构的运动特性、动力特性有何影响?
5-7何谓运动失真?
为何会产生运动失真?
它对凸轮机构的工作有何影响?
应如何避免?
5-8何谓推杆的偏心距?
它的正负如何确定?
它对压力角有何影响?
5-9在某对心直动尖顶推杆盘状凸轮机构中,推杆在推程和回程中分别采用等加速等减速和等速运动规律。
已知:
s=50mm,0=120,01=60,0‘=100,02=80,求推杆在各运动阶段的位移、速度、加速度方程式,画出其相应的运动规律线图,并指出哪里有冲击?
何种冲击?
5-10设计一摆动尖顶推杆盘状凸轮机构。
已知:
凸轮沿顺时针方向等速转动,中心距为80mm,凸轮基圆半径为35mm,推杆长度为65mm,推杆的最大摆角=14,0=140,01=0,0‘=120,02=100,推杆在推程、回程皆采用简谐运动规律,用图解法绘制凸轮轮线。
5-11某偏置直动滚子推杆盘状凸轮机构。
已知:
凸轮沿逆时针方向等速转动,凸轮基圆半径为45mm,偏心距为12mm,推杆的行程为35mm,滚子半径为10mm,0=140,01=40,0‘=130,02=50,推杆在推程、回程皆采用简谐运动规律,试选定推杆的偏置方向,并绘出凸轮的理论轮线与实际轮线。
5-12用图解法设计一对心直动平底推杆盘状凸轮机构。
已知凸轮基圆半径为28mm,推杆平底与轨道中心线垂直,凸轮沿顺时针方向等速转动。
当凸轮转过130时推杆以余弦加速度运动规律上升20mm,再转过140时,推杆又以摆线运动规律回到起点,其余时间推杆静止不动。
问:
1)这种凸轮机构压力角的变化规律如何?
是否存在自锁?
若存在应如何避免?
2)设计凸轮轮廓曲线。
5-13已知摆动滚子推杆盘状凸轮机构的基圆半径为30mm,中心距为65mm,摆杆长度为55mm,滚子半径为10mm。
凸轮沿顺时针方向等速转动,当凸轮转过180时,推杆以摆线运动规律向上摆动30;凸轮再转过60时,推杆静止不动;凸轮转过其余角度时,推杆以等速运动摆回到起始位置。
试以图解法设计凸轮轮廓曲线。
5-14试用解析法求题5-10所述凸轮机构的凸轮轮廓曲线方程。
5-15试用解析法求题5-11所述凸轮机构的凸轮轮廓曲线方程。
5-16试用解析法求题5-12所述凸轮机构的凸轮轮廓曲线方程。
5-17如图5-23所示的凸轮机构中,从动件的起始上升点均为C点。
(1)试在图中标注出从C点接触到D点接触时,凸轮转过的角度ψ及从动件的位移。
(2)标出在D点接触时凸轮机构的压力角。
图5-23题5-17图图5-24题5-18图
5-18图5-24所示为一对心直动滚子从动件盘形凸轮机构中,凸轮的实际轮廓线为一圆,圆心在A点,半径R=40mm,凸轮绕轴心逆时针方
 升级会员
升级会员 