四相双四拍步进电机控制系统设计剖析.docx
《四相双四拍步进电机控制系统设计剖析.docx》由会员分享,可在线阅读,更多相关《四相双四拍步进电机控制系统设计剖析.docx(17页珍藏版)》请在冰豆网上搜索。
四相双四拍步进电机控制系统设计剖析
1引言
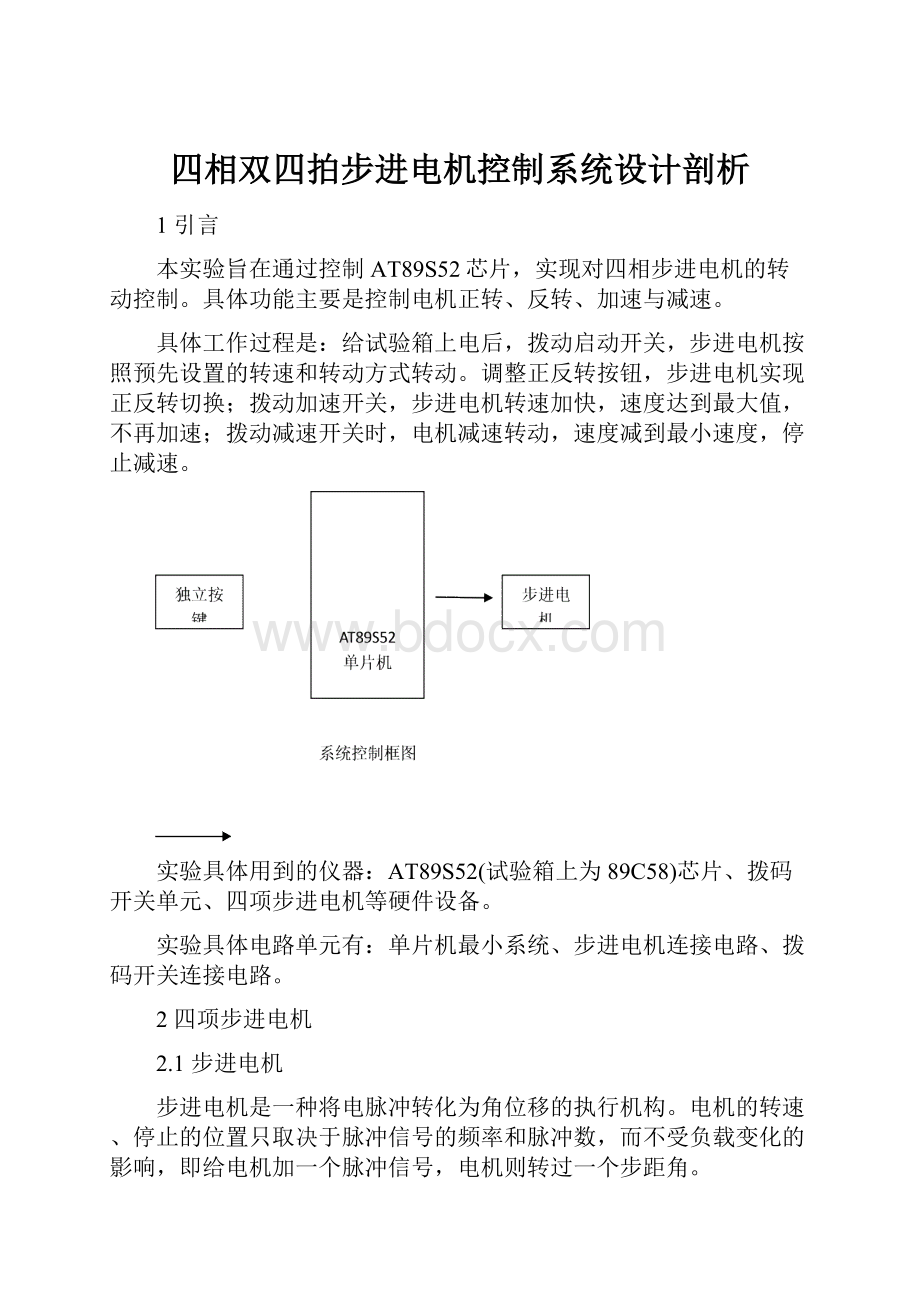
本实验旨在通过控制AT89S52芯片,实现对四相步进电机的转动控制。
具体功能主要是控制电机正转、反转、加速与减速。
具体工作过程是:
给试验箱上电后,拨动启动开关,步进电机按照预先设置的转速和转动方式转动。
调整正反转按钮,步进电机实现正反转切换;拨动加速开关,步进电机转速加快,速度达到最大值,不再加速;拨动减速开关时,电机减速转动,速度减到最小速度,停止减速。
实验具体用到的仪器:
AT89S52(试验箱上为89C58)芯片、拨码开关单元、四项步进电机等硬件设备。
实验具体电路单元有:
单片机最小系统、步进电机连接电路、拨码开关连接电路。
2四项步进电机
2.1步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
2.2步进电机的共组原理
2.2步进电机的控制
1.换相顺序控制:
通电换相这一过程称为脉冲分配。
例如:
混合式步进电机的工作方式,其各相通电顺序为A-B-C-D,通电控制脉冲必须严格按照这一顺序分别控制A,B,C,D相的通断。
2.控制步进电机的转向控制:
如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
3.控制步进电机的速度控制:
如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
2.3步进电机的工作过程
开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图3.a、b、c所示:
a.单四拍b.双四拍c八拍
步进电机工作时序波形图
对步进电机四个绕组依次实现如下方式的循环通电控制:
单四拍运行:
正转A-B-C-D;反转D-C-B-A
双四拍运行:
正转AB-BC-CD-DA;反转DC-CB-BA-AD
八拍运行:
正转A-AB-B-BC-C-CD-D-DA
3电路图设计
3.1AT89S52概述
AT89S52单片机是ATMEL公司推出的高档型AT89S系列单片机中的增强型产品。
关于其功能原理及其应用不再赘述。
这里只介绍本实验用到的端口和功能。
P1口:
用户使用的通用I/O口,8位准双向,编程和校验时,可做为高8位地址线;P1.0和P1.1引脚另有第二功能(此实验没用到,不再介绍)
P3口:
8位准双向I/O口
RST:
复位信号输入端,高电平有效
EA:
访问芯片内部和芯片外部程序存储器的选择信号
XTAL1,XTAL2:
芯片内振荡器反相放大器的输出端和输入端
3.2最小系统
单片机最小系统或者称为最小应用系统,就是用最少的元件组成的单片机可以工作的系统,对52系列单片机来说,最小系统一般应该包括:
单片机、复位电路、晶振电路。
3.3复位电路
复位电路采用手动复位和上电自动复位。
上电自动复位:
在单片机上电的瞬间,RC电路充电,由于电容上电电压不能突变,所以RST引脚出现高电平,RST引脚出现的高电平将会随着对电容C的充电过程而逐渐回落。
手动复位:
当按下复位按钮时,RST出现高电平,实现复位。
3.4拨码电路
拨码开关和P3口相连,拨动开关sw1、sw2、sw3、sw4来控制电机的启停、正反转、速度的加减。
3.5电机驱动电路
将步进电机的A、B、C、D分别接到P1.0、P1.1、P1.2、P1.3管脚上
实物连接
4程序设计
4.1主程序框图
系统分为电机转动、电机正转、电机反转、电机加速、电机减速和电机停止这几个部分组成,其主程序框图如图下所示
4.2步进电机速度控制程序框图
正转部分:
送P1口不同的值,从而改变电机电源的相序,是电机正转,数值分别为0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1,0xf9。
流程图如下
反转部分:
送P1口不同的值,从而改变电机电源的相序,是电机反转,数值分别为0xf9,0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8。
流程图如下
加速部分:
当电机处于正转或反转的时候,按下K2,调用加速程序,是电机每转动一部的延时时间变短,从而实现电机的加速。
减速部分:
当电机处于正转或反转的时候,按下K3,调用加速程序,是电机每转动一部的延时时间变长,从而实现电机的减速。
运行与停止:
按下K1键,系统默认是停止,拨动一次是运行,在拨动一次是停止,即是基数次运行,偶数次停止(一般不会拨动N次,为了看到现象,就拨动少数几次)
4.3拨码开关输入程序框图
用于判断P3.1、P3.2、P3.3、P3.4,
5源程序
源程序如下:
STACK1SEGMENTSTACK
DW256DUP(?
)
STACK1ENDS
DATASEGMENT
KEQU09H;工作步数
TABSHZDB03H,06H,0CH,09H;双四拍正转模型
TABSHFDB09H,0CH,06H,03H;双四拍反转模型
TABLE1DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH;七段数码管字模
DATAENDS
CODESEGMENT
ASSUMECS:
CODE,DS:
DATA,SS:
STACK1
START:
MOVAX,DATA
MOVDS,AX
MOVAL,80H;初始化8255,工作方式0,A,、B、C口均为输出
MOVDX,MY8255_MODE
OUTDX,AL
WAIT1:
MOVAH,08H;等待启动键“0”按下
INT21H
CMPAL,30H
JEMAIN
JMPWAIT1
MAIN:
MOVAH,08H;判断工作方式控制键是否按下
INT21H;若键按下转到相应的程序,否则循环等待.
CMPAL,33H
JESHUANGSI;转双四拍正转
CMPAL,34H
JESHUANGSI1;转双四拍反转
CMPAL,35H
JEQUIT1
JMPMAIN
;单四拍正转
ZHENGSI:
MOVAL,02H;点亮正转指示灯
MOVDX,MY8255_C
OUTDX,AL
MOVCL,K
ZHENGSI0:
LEABX,TABLE1;数码管显示剩余步数
MOVAL,CL
XLAT
MOVDX,MY8255_A
OUTDX,AL
ZHENGSI1:
MOVBL,04H;驱动电机
MOVDX,MY8255_B
LEADI,TABSZ
ZHENGSI2:
MOVAH,0BH;判断是否有按键切换工作方式
INT21H;有按键跳回判断按键对应程序,否则继续执行程序
INCAL
JZMAIN
CALLXIAN;调用显示子程序,显示工作剩余拍数
MOVAL,[DI]
OUTDX,AL
CALLDLY;调用延时子程序
INCDI
DECBL;判断是否工作完所有拍数,有则退出等待重选工作方式,否则继续循环
JNZZHENGSI2
DECCL
JNZZHENGSI0
JMPWAIT1
;中间跳转
SHUANGSI:
JMPSHSIZH
SHUANGSI1:
JMPSHSIF
;双四拍正转
SHSIZH:
MOVAL,02H
MOVDX,MY8255_C
OUTDX,AL
MOVCL,K
SHSIZH0:
LEABX,TABLE1
MOVAL,CL
XLAT
MOVDX,MY8255_A
OUTDX,AL
SHSIZH1:
MOVBL,08H
MOVDX,MY8255_B
LEADI,TABSHZ
SHSIZH2:
MOVAH,0BH
INT21H
INCAL
JZMAIN1
CALLXIAN
MOVAL,[DI]
OUTDX,AL
CALLDLY
INCDI
DECBL
JNZSHSIZH2
DECCL
JNZSIBAZH0
JMPWAIT1
;中间跳转程序
WAIT00:
JMPWAIT1
;双四拍反转
SHSIF:
MOVAL,01H
MOVDX,MY8255_C
OUTDX,AL
MOVCL,K
SHSIF0:
LEABX,TABLE1
MOVAL,CL
XLAT
MOVDX,MY8255_A
OUTDX,AL
SHSIF1:
MOVBL,4
MOVDX,MY8255_B
LEADI,TABSHF
SHSIF2:
MOVAH,0BH
INT21H
INCAL
JZMAIN1
CALLXIAN
MOVAL,[DI]
OUTDX,AL
CALLDLY
INCDI
DECBL
JNZSHSIF2
DECCL
JNZSHSIF0
JMPWAIT00
MAIN11:
JMPMAIN1
;四相八拍正转
SIBAZH:
MOVAL,02H
MOVDX,MY8255_C
OUTDX,AL
MOVCL,K
SIBAZH0:
LEABX,TABLE1
MOVAL,CL
XLAT
MOVDX,MY8255_A
OUTDX,AL
SIBAZH1:
MOVBL,08H
MOVDX,MY8255_B
LEADI,TABBZ
SIBAZH2:
MOVAH,0BH
INT21H
INCAL
JZMAIN11
CALLXIAN
MOVAL,[DI]
OUTDX,AL
CALLDLY
INCDI
DECBL
JNZSIBAZH2
DECCL
JNZSIBAZH0
JMPWAIT00
QUIT:
MOVDX,MY8255_A;结束退出程序
MOVAL,00H
OUTDX,AL
MOVAX,4C00H
INT21H
;软件延时子程序
DLYPROCNEAR
PUSHCX
PUSHAX
MOVCX,0FFFFH
D1:
MOVAX,5FFFH
D2:
DECAX
JNZD2
LOOPD1
POPAX
POPCX
RET
DLYENDP
XIANPROCNEAR;剩余拍数显示子程序
PUSHDX
MOVDL,BL
ADDDL,30H
MOVAH,02H
INT21H
MOVDL,20H
MOVAH,02H
INT21H
POPDX
RET
XIANENDP
CODEENDS
ENDSTART
6参考文献
1.<>哈尔滨工业大学出版社,马家展;
2.<<电动机的单片机控制>>北京航天大学出版社,王晓明;
3.<<自动化技术及应用>>机械工业出版社,1996,刘福财;
4.<<单片机原理及应用>>湖南大学出版社,2004.7,李鸿;
5.<<微型计算机原理及应用>>清华大学出版社,2001.2,郑学坚、周斌。
7致谢
在这次课程设计的撰写过程中,我得到了许多人的帮助。
首先我要感谢我的老师在课程设计上给予我的指导、提供给我的支持和帮助,这是我能顺利完成这次报告的主要原因,更重要的是老师帮我解决了许多技术上的难题,让我能把系统做得更加完善。
在此期间,我不仅学到了许多新的知识,而且也开阔了视野,提高了自己的设计能力。
其次,我要感谢帮助过我的同学,他们也为我解决了不少我不太明白的设计商的难题。
同时也感谢学院为我提供良好的做毕业设计的环境。
最后再一次感谢所有在设计中曾经帮助过我的良师益友和同学
 升级会员
升级会员 