LC滤波电路及负载的建模与仿真.docx
《LC滤波电路及负载的建模与仿真.docx》由会员分享,可在线阅读,更多相关《LC滤波电路及负载的建模与仿真.docx(11页珍藏版)》请在冰豆网上搜索。
LC滤波电路及负载的建模与仿真
1问题描述
1.1问题概述
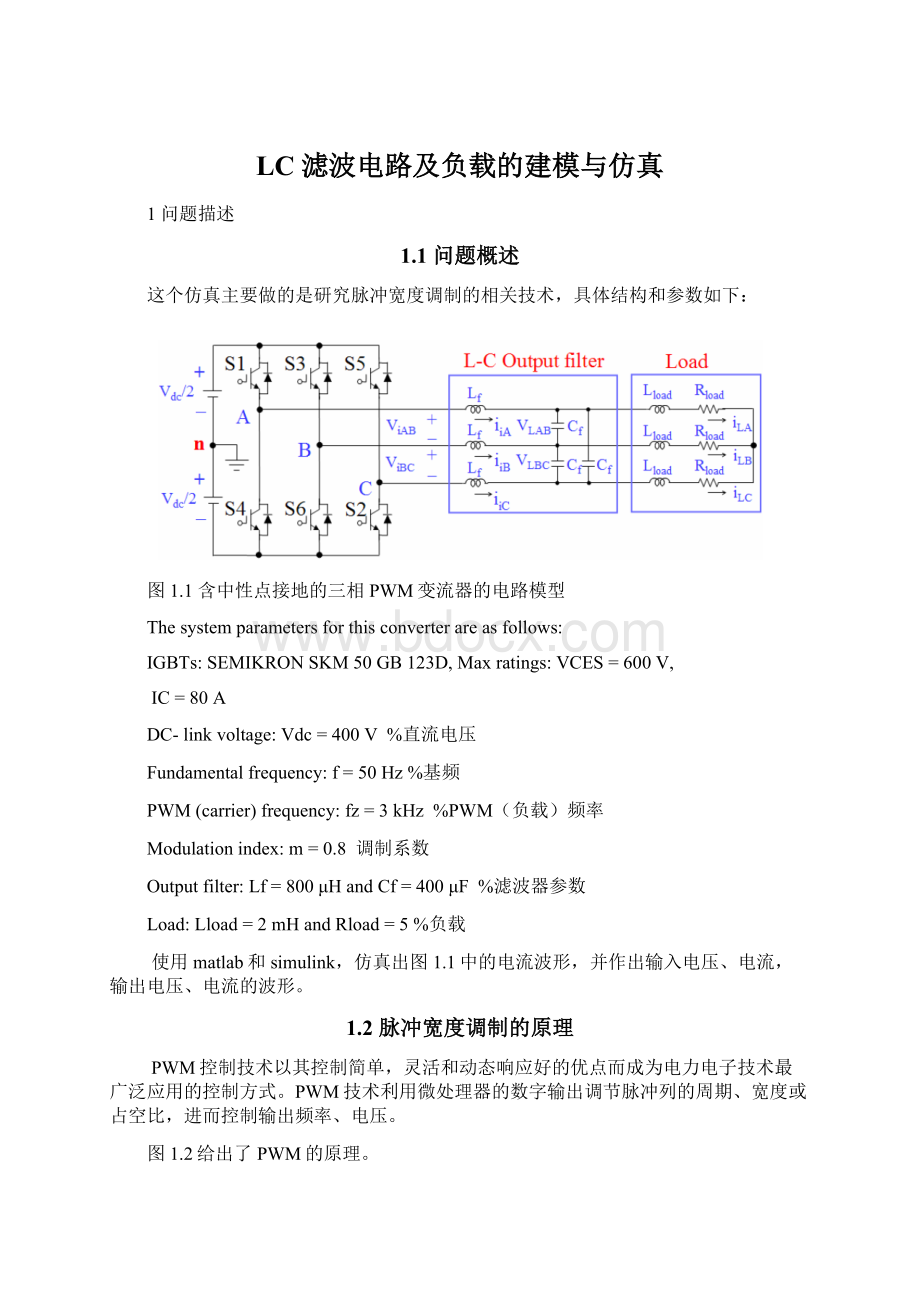
这个仿真主要做的是研究脉冲宽度调制的相关技术,具体结构和参数如下:
图1.1含中性点接地的三相PWM变流器的电路模型
Thesystemparametersforthisconverterareasfollows:
IGBTs:
SEMIKRONSKM50GB123D,Maxratings:
VCES=600V,
IC=80A
DC-linkvoltage:
Vdc=400V%直流电压
Fundamentalfrequency:
f=50Hz%基频
PWM(carrier)frequency:
fz=3kHz%PWM(负载)频率
Modulationindex:
m=0.8调制系数
Outputfilter:
Lf=800μHandCf=400μF%滤波器参数
Load:
Lload=2mHandRload=5%负载
使用matlab和simulink,仿真出图1.1中的电流波形,并作出输入电压、电流,输出电压、电流的波形。
1.2脉冲宽度调制的原理
PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式。
PWM技术利用微处理器的数字输出调节脉冲列的周期、宽度或占空比,进而控制输出频率、电压。
图1.2给出了PWM的原理。
图1.2单相变换器的电路模型
图1.3脉冲宽度调制
由上图可以看到,变流器的输出电压由控制电压和输入的三角波电压决定:
当控制电压大于输入的三角波电压时,经PWM后输出的电压为正
2状态空间描述
2.1原始KCL、KVL方程
现代控制理论研究的时不变线性系统模型如下:
=Ax+Bu
y=Cx+Du
按要求写出系统状态空间的描述,需要将输入变量与状态变量之间联系起来,进而求得系统矩阵A,输入矩阵B,输出矩阵C以及直接转移矩阵D。
当状态空间中未知矩阵A、B、C、D求出后,就可得输出端系统的状态空间描述。
由电路原理,可得方程组:
对于
左侧电路有,
对于
右侧电路有,
根据电容
上的电流关系可得KCL方程
由于电路为三相对称,所以有,
联立上述方程组,将含一阶导数的放在方程一边,有,
2.2动态方程的建立
=Ax
+Bu
+
y=Cx
2.3用Matlab生成状态空间模型
在Matlab中,选择调用状态空间模型(ss模型)来完成输出端的建模。
程序如下:
A=[000-416.66670416.6667000;000416.6667-416.66670000;0000416.6667-416.6667000;833.3333-833.33330000-833.3333833.33330;0833.3333-833.33330000-833.3333833.3333;-833.33330833.3333000833.33330-833.3333;000166.66670-166.6667-250000;000-166.6667166.666700-25000;0000-166.6667166.666700-2500];
B=[416.670-416.67;-416.67416.670;0-416.67416.67;000;000;000;000;000;000];
C=[000000100;000000010;000000001];
D=zeros(3,3)%D矩阵为3*3的空矩阵
sys=ss(A,B,C,D)%调用ss函数生成状态空间模型
显示结果为状态空间中所对应的四个矩阵A、B、C、D
a=
x1x2x3x4x5x6x7x8x9
x1000-416.70416.7000
x2000416.7-416.70000
x30000416.7-416.7000
x4833.3-833.30000-833.3833.30
x50833.3-833.30000-833.3833.3
x6-833.30833.3000833.30-833.3
x7000166.70-166.7-250000
x8000-166.7166.700-25000
x90000-166.7166.700-2500
b=
u1u2u3
x1416.70-416.7
x2-416.7416.70
x30-416.7416.7
x4000
x5000
x6000
x7000
x8000
x9000
c=
x1x2x3x4x5x6x7x8x9
y1000000100
y2000000010
y3000000001
d=
u1u2u3
y1000
y2000
y3000
4系统的能控性和能观性
4.1系统能控性研究
首先,给出系统能控性的定义,在加入适当的控制作用后,能否在有限时间内将系统从任一初始状态转移到希望的状态上,即系统是否具有通过控制作用随意支配状态的能力。
这里,采用秩判据的方法来分别判断系统的状态能控性和输出能控性。
4.1.1状态能控性研究
首先,进行状态空间的生成,然后生成状态能控性判别矩阵Qc,接下来通过秩判据来判断系统是否具有状态能控性。
程序如下:
A=[000-416.66670416.6667000;000416.6667-416.66670000;0000416.6667-416.6667000;833.3333-833.33330000-833.3333833.33330;0833.3333-833.33330000-833.3333833.3333;-833.33330833.3333000833.33330-833.3333;000166.66670-166.6667-250000;000-166.6667166.666700-25000;0000-166.6667166.666700-2500];
B=[416.670-416.67;-416.67416.670;0-416.67416.67;000;000;000;000;000;000];
C=[000000100;000000010;000000001];
D=zeros(3,3)%D矩阵为3*3的空矩阵
sys=ss(A,B,C,D)%调用ss函数生成状态空间模型
Qc=ctrb(sys);%状态能控性的秩判据方法
n=rank(Qc);
m=length(A);%获得矩阵A的行或列数的最大值
结论:
若Qc的秩和矩阵A的行或列数相同,即满秩,即可判别系统具有状态完全能控性。
判断结果为状态不完全能控。
4.1.2输出能控性研究
这里给出系统能观性的定义,如果系统的任何内部运动状态变化都可由系统的外部输出和输入唯一地确定,那么称系统是能观测的,或者更确切地说,是状态能观测的。
否则,就称系统为状态不完全能观测的。
首先,进行状态空间的生成,然后生成输出能控性判别矩阵Qm,接下来通过秩判据来判断系统是否具有状态能控性。
程序如下:
A=[000-416.66670416.6667000;000416.6667-416.66670000;0000416.6667-416.6667000;833.3333-833.33330000-833.3333833.33330;0833.3333-833.33330000-833.3333833.3333;-833.33330833.3333000833.33330-833.3333;000166.66670-166.6667-250000;000-166.6667166.666700-25000;0000-166.6667166.666700-2500];
B=[416.670-416.67;-416.67416.670;0-416.67416.67;000;000;000;000;000;000];
C=[000000100;000000010;000000001];
D=zeros(3,3)%D矩阵为3*3的空矩阵
sys=ss(A,B,C,D)%调用ss函数生成状态空间模型
Qc=ctrb(sys);
m=size(C,1);%获得矩阵C的行数
Qy=[C*Qc,D];
Qm=rank(Qy);%生成输出能控性判别矩阵
结论:
若Qm的秩和矩阵C的行数相同,即可判别系统具有输出完全能控性。
判断结果为输出不完全能控。
4.2系统能观测性的研究
首先,进行状态空间的生成,然后生成系统能观性判别矩阵Q0,通过秩判据来判断系统是否具有能观测性。
程序如下:
A=[000-416.66670416.6667000;000416.6667-416.66670000;0000416.6667-416.6667000;833.3333-833.33330000-833.3333833.33330;0833.3333-833.33330000-833.3333833.3333;-833.33330833.3333000833.33330-833.3333;000166.66670-166.6667-250000;000-166.6667166.666700-25000;0000-166.6667166.666700-2500];
B=[416.670-416.67;-416.67416.670;0-416.67416.67;000;000;000;000;000;000];
C=[000000100;000000010;000000001];
D=zeros(3,3)%D矩阵为3*3的空矩阵
sys=ss(A,B,C,D)%调用ss函数生成状态空间模型
Q0=obsv(A,C);%生成能观测性判别矩阵
n=rank(Q0);
L=size(A,1)%返回矩阵A的行数
结论:
如果Q0的秩和矩阵A的行数相同,则可判别为系统状态能观测。
判断结果为状态不完全能观测。
ifm==Qm%
输出完全能控
else
输出不完全能控
Q0=obsv(A,C);
r=rank(Q0);
L=size(A,1)
ifn==L
完全能观
else
不完全能观
 升级会员
升级会员 