机械原理课程设计小型卧式模锻机.docx
《机械原理课程设计小型卧式模锻机.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计小型卧式模锻机.docx(12页珍藏版)》请在冰豆网上搜索。
机械原理课程设计小型卧式模锻机
1、设计要求
2、运动方案拟定
3、执行机构比较选择及计算
4、运动循环图
5、传动机构设计
6、原动机选择
7、设计总结及体会
8、附录
9、参考文献
1、设计要求
一、设计题目
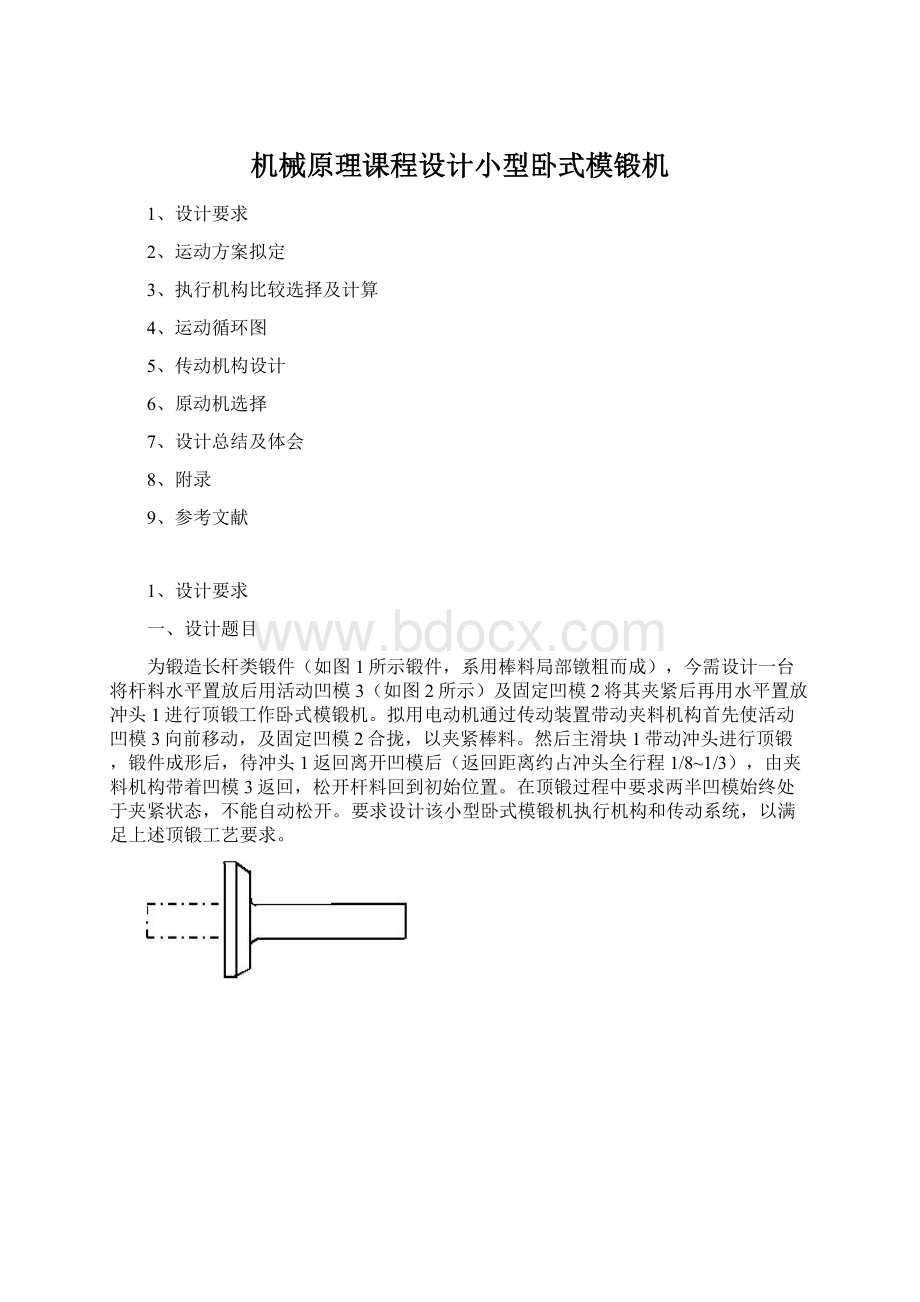
为锻造长杆类锻件(如图1所示锻件,系用棒料局部镦粗而成),今需设计一台将杆料水平置放后用活动凹模3(如图2所示)及固定凹模2将其夹紧后再用水平置放冲头1进行顶锻工作卧式模锻机。
拟用电动机通过传动装置带动夹料机构首先使活动凹模3向前移动,及固定凹模2合拢,以夹紧棒料。
然后主滑块1带动冲头进行顶锻,锻件成形后,待冲头1返回离开凹模后(返回距离约占冲头全行程1/8~1/3),由夹料机构带着凹模3返回,松开杆料回到初始位置。
在顶锻过程中要求两半凹模始终处于夹紧状态,不能自动松开。
要求设计该小型卧式模锻机执行机构和传动系统,以满足上述顶锻工艺要求。
图6—23 锻件 图6—24卧式模锻机执行构件
二、设计数据及要求
电动机同步转速:
nm=1000r/min或1500r/min;
冲头顶锻次数为每分钟50~75次;
主滑块1全行程H=200~380mm;
顶锻工艺开始后冲头工作行程H1=(1/2~2/3)H;
夹紧滑块3总行程h=60~80mm;
作用在主滑块上顶锻力F1=250~500KN;
作用在夹紧滑块3上夹紧力F2=F1/3;
要求该模锻机机械效率高,振动冲击小。
2、运动方案拟定
一、运动功能分析
本机构中,原动机以转动形式输出功率,根据机构要求,可以确定,需要将原动机高速转动经过降速后传动给执行机构。
根据设计要求,执行机构需进行夹紧和顶锻运动要求,同时夹紧和顶锻过程需要符合相应配合要求。
二、运动转换
运动转换功能图:
三、运动机构
功能树状图:
原动机
小型卧式模锻机传动机构
执行机构
3、执行机构比较选择及计算
①顶锻机构设计及选择
方案一:
图3-1
图3-2
机构说明:
⑴r=100mmn=60r/min
⑵此机构中,冲头全行程为200mm,顶锻工艺中冲头工作行程为100mm。
⑶在图3-2中,曲柄1可以绕滑块3转动,这样可以实现整个机构在一个运动周期内运动可行性。
机构优缺点分析:
优点:
⑴图3-2中,2运动方向始终及冲头运动方向一致,因此可承受更大力F。
⑵采用图3-2中三角形桁架结构,可以提高构件受力稳定性。
⑶根据图3-1可知,冲头位移s及曲柄半径r有以下关系:
s=r*sinθ
因此,此机构更利于计算滑块及曲柄间运动位置关系。
缺点:
曲柄上滑块3将1和2连接,会有一定装配难度。
方案二:
图3-3
计算得:
a2b2-104b2+108=0
则:
a2=(104b2-108)/b2
图3-4
b2-2ab=104
使曲柄在图3-4位置时,开始顶锻工艺。
a2b2-104b2+108=0
则:
有急回特性:
θ=25°
K=1.32
机构优缺点分析:
优点:
⑴有急回,可以缩短非工作段时间,增加工作段时间,可减小杆件受力。
⑵结构简单,装配方便。
缺点:
传力效果不佳,且曲柄及连杆运动关系计算比较复杂。
综上所述:
选择方案一
②夹紧机构设计及选择:
图3-5
假设:
ED=a,CD=b,DF=c,滑块1行程=d,∠EFD=α
滑块2两极性位置间距为60mm,在滑块2在夹紧行程最后10mm范围内满足最小传动角要求(即α<50°)
图3-6
根据图3-6,可知:
在滑块2在夹紧行程中距离点F2时应该有以下结论:
cosα=(c2+(a+c-10)2-a2)/(2*a*(c-10)),α<50°
得:
a=(c2+(c-10)2-2c(c-10)cosα)/(2ccosα+20-2c)
其中2ccosα+20-2c>0
可算出:
c<10/(1-cosα)
利用C语言,可得出若干多个解,从中选择较合适解:
图3-7
根据图3-7,可以看出,左图传力效果要好于右图,因此选用左图具体参数,同时可知滑块1极限位置间距离为72.6mm。
4、运动循环图
①直线式运动循环图
②同心圆式运动循环图
5、传动机构设计
①主轴设计
主轴半径r=25mm
主轴转速为50r/min
②皮带轮及齿轮尺寸及设计
皮带轮传动中,r小=100mm,r大=20mm
齿轮传动中,采用正传动,二级传动,一级和二级传动比都是2:
1(紧凑齿轮)
图中,轮系中:
z1=17,m1=6
z2=34,m2=6
z2′=17,m2′=6
z3=34,m3=6
③凸轮机构设计
根据rb=2r可算出,凸轮基圆半径rb=50mm,又由图3-7中所示d=72.6mm可知,凸轮两极限位置半径之差为72.6mm。
凸轮机构示意图:
利用CAD绘制出凸轮轮廓:
凸轮1、2主要参数:
凸轮基圆rb=50mm,rmin=rb=50mm,rmax=rb+72.6=132.6mm
转子半径rr=10mm,偏距e=10mm
6、原动机选择
已知:
顶锻滑块受阻力F1=300kN,夹紧滑块受阻力F2=F1/3=100kN
顶锻滑块工作位移s1=100mm,凸轮机构在夹紧滑块工作时间段内转过角度α=150°,凸轮机构上受到阻力为F3,滚子偏距e=10mm,主轴转动一周时间T=1.2s。
顶锻机构处消耗功率为P1,夹紧机构处消耗功率为P2,原动机功率为P。
原动机功率计算如下:
P1=F1×S1/(T×0.25)=100000W=10Kw
根据图3-7可知:
F3=F2(tan46°+tan47°)=210.8Kn
P2=F3×e(T×150°/360°)=1054W=1.054kW
综上:
P=P1+P2=11.054kW
因此原动机得功率为11.054Kw,转速为1000r/min。
根据文献【2】:
原动机选择Y132M2-6型电机
7、设计总结及体会
进入大学快两年了,这还是我第一次做课程设计,我觉得课程设计很能锻炼一个人,课程设计可以使我们从书本纯理论世界里走出来,而是在理论加实践道路上自我探索。
历时两个星期,我们这次课程设计也快接近尾声,对此我有一些心得体会。
首先,我觉得机械原理课程设计是对之前所学《机械原理》一书全面把握,其所需知识分布在全书各个角落。
因此,在做课程设计之前,我把机原一书又复习了一遍,对于一些难点、重点知识也进行了认真地学习。
通过课程设计,将书中许多章节知识串联在一起,这也为期末考试作了一点准备。
其次,学会了机械原理,就做机械原理课程设计,对于第一次做课程设计我来说确实是个不小挑战。
在设计中常常会遇到一些未知参数,而这些参数又无法通过其他已知数据推算出来,因此只能自己确定。
由于我们缺乏相关实际经验,所以在确定这些数据时候,不清楚这些参数是否能满足机器运动要求、是否能满足加工工艺要求。
所以,在以后学习和工作中,应尽可能多去积累相关经验,以使我们设计更加完善。
最后,我感觉这次课程设计中,需要查阅很多文献,这些都是从网络和一些相关专业资料上查到,这也为设计解决了不少难题。
在设计中,也要注意团队配合,相互之间交流学习是十分重要。
8、附录
计算图3-7中杆a、c长度相关c语言程序:
#include
#include
main()
{
intc;
doublea,s1,s2,x;
for(c=65;c<100;c++)
for(x=0.25;x<=0.87;x=x+0.01)
{
s1=(c*c+sqrt(c-10)-2*c*(c-10)*cos(x));
s2=2*c*cos(x)-2*(c-10);
a=s1/s2;
if(a>=50&&a<=100)
printf("c=%d,x=%f,a=%f\n",c,x,a);
}
}
9、参考文献
【1】申永胜.机械原理教程(第二版).清华大学出版社
【2】邹慧君.机械原理课程设计手册.高等教育出版社
【3】鲁屏宇.工程图学.机械工业出版社
【4】丁海军.程序设计基础(C语言).北京航空航天出版社
【5】管荣法.凸轮及凸轮机构.国防工业出版社
【6】藤森洋三.机构设计实用构思图册.机械工业出版社
【7】《机械设计丛书》编委.简谐运动机构设计.上海科学技术出版社
 升级会员
升级会员 