慧鱼实验报告.docx
《慧鱼实验报告.docx》由会员分享,可在线阅读,更多相关《慧鱼实验报告.docx(10页珍藏版)》请在冰豆网上搜索。
慧鱼实验报告
慧鱼机器人模型组装综合实验
一、实验目的
本实验的目的是使学生了解机器人和机电一体化技术基本原理,了解和掌握机器人和机电一体化技术的基本知识,使学生对机器人和机电一体化技术有一个完整的理解。
培养学生机电一体化设计的能力。
二、实验要求
1.学生在实验课前必须认真预习教科书与实验指导书中的相关内容,为实验做好充分准备。
2.要求学生综合利用前期课程及本门课程中所学的相关知识点,了解电机安装与使用的基本知识,学习电机控制技术、机电传动控制、电工电子技术等课程的相关内容,培养学生在机电一体化技术方面综合分析与解决实际问题的能力。
三、实验内容
学生运用已学的机械设计基础、工业机器人、机电传动控制、电工电子技术等课程的相关知识,阅读慧鱼机器人说明书,根据教师拟定的一些设计题目或学生自选题目,设计并组装一个机电一体化机械系统。
进行机械组件和电气组件与电机的连接,输入并运行程序,记录参数,分析结果,培养学生在机电一体化技术的工程应用方面分析与解决问题的综合能力。
四、实验条件
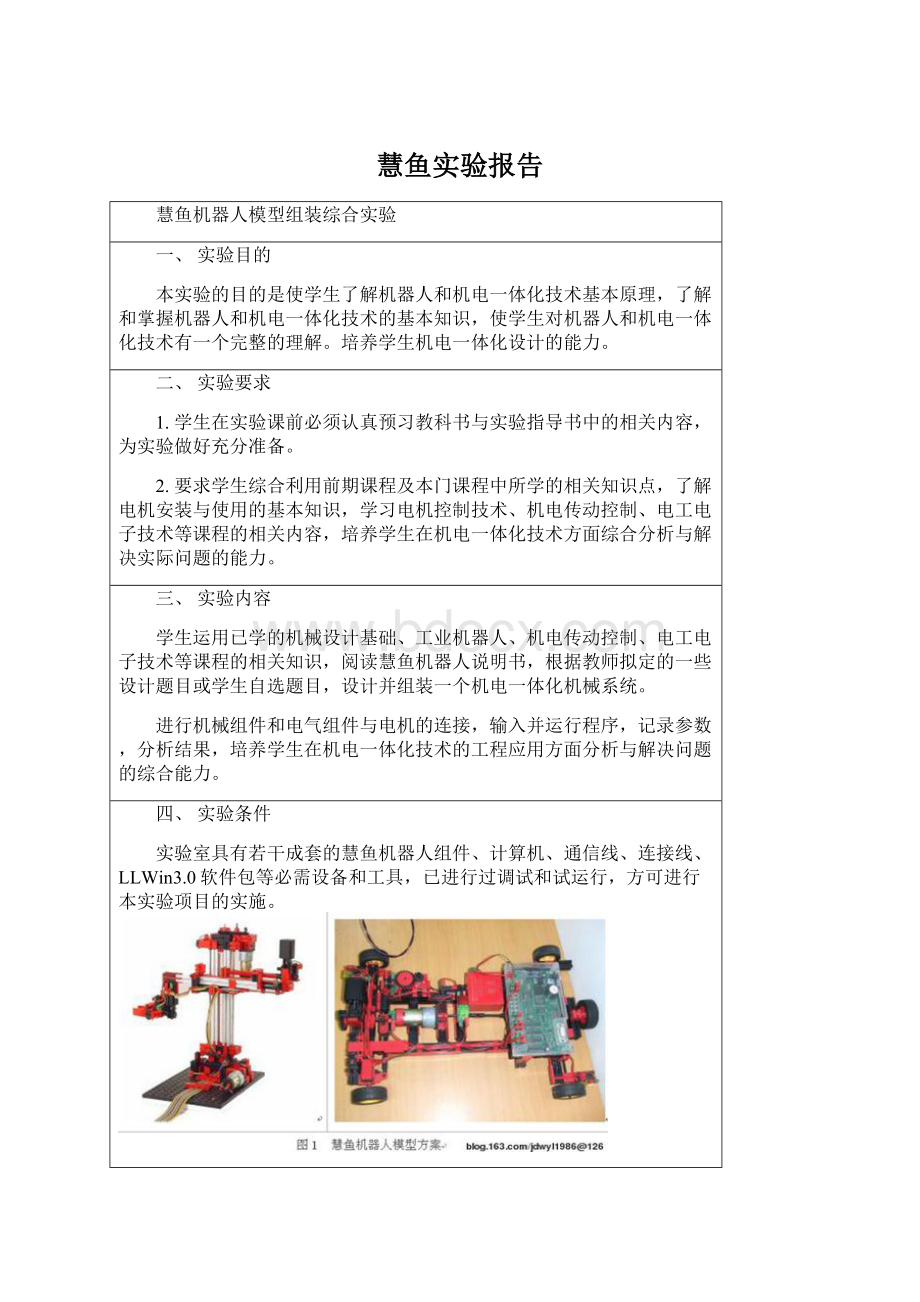
实验室具有若干成套的慧鱼机器人组件、计算机、通信线、连接线、LLWin3.0软件包等必需设备和工具,已进行过调试和试运行,方可进行本实验项目的实施。
五、实验步骤
(1)慧鱼模型名称及工作过程
避障机器人
(2)模型组件选择
柱、块:
固定支撑和机器人实体搭建;
板:
一侧具有平滑表面,通常用于制作平台或装饰;
轮
孔条:
可用于轴、连杆等组件的支撑;
连接件:
在结构制作中起到衔接的作用。
连杆、链条、履带、齿轮、齿条、涡轮、蜗杆、凸轮、弹簧、曲轴、万向节等
9V双向直流电机、按钮、灯、接线插头、光敏晶体管、电磁阀、接口板等
储气罐、气缸、活塞、气弯头、电磁气阀、气管
(3)模型组件组装
【提示】:
①各个组件之间是如何连接的;②组件连接中有哪些注意事项。
可以附模型装配图。
构件连接方式:
基本构件采用燕尾槽插接方式连接,可实现六面拼接,可多次拆装。
确保构件要到位,不滑动;注意电子元件正负极,接线稳定可靠不松动;整体美观,布线规范。
(4)接线
电路连接:
通信线路连接:
①USB口连接方式:
需要安装硬件驱动;
②串口连接:
硬件不支持热拔插,须关闭计算机后再进行硬件连接。
(5)端口设置及硬件调试
路径一、菜单“选项”下的“设置接口”菜单;
路径二、工具条上“检查接口和终端”按钮。
弹出端口设置对话框,在“端口”下拉列表中选择连接的接口,其他参数默认。
如果不知道端口号,可以在系统硬件信息中查看。
完成端口设置之后,可进行硬件的测试:
路径一、菜单“选项”下的“检查接口”菜单;
路径二、工具条上“检查接口和终端”按钮。
弹出“检查接口”对话框:
M1~M4用鼠标点击,如果输出组件是电机,可以用左键和右键分别点击测试按钮,可以实现电机的不同转动方向;E1~E8连接按钮,E1~E8连接光敏晶体管(分别演示)。
在后面的编程中,需要使用数字量输入/输出接口号,因此硬件测试不仅仅是为了测试电路、通信线路连接是否正常,同时也是记录数字量输入/输出接口号与机器人关节控制之间的关系。
(6)程序设计
打开LLWin软件,点击新建按钮,进入程序编辑界面。
右侧有一个浮动的窗体,窗体名为工具箱。
工具箱窗体的功能模块页面上共有18个功能模块,也就是说软件自身已经将各个标准功能集成起来,封装成为一个功能块,因此在编写控制程序时,只要将相应的模块拖到相应的位置,并与其他功能模块连接起来即可。
介绍每一个功能模块,强调每一个控制程序均是一开始模块开始,结束模块结束。
举例:
三自由度机械手Z轴上升。
刚才硬件测试时,记录了控制Z轴的电机是M1。
为了提高程序的编写效率,在编写较长的控制程序时,将需要重复使用的程序段封装起来,集成为子程序,实质上就是一个自定义的功能模块。
新建子程序:
子程序按钮→输入子程序名称后确定→进入子程序编制界面
编辑子程序:
子程序按钮→选择子程序→进入子程序编制界面
每个子程序都是以子程序入口模块开始,以子程序出口模块结束。
具体的编制方法与主程序编制方法相同。
子程序编制完成之后,要在程序设计界面中设置子程序的进出口位置,如果不设置子程序进出口位置,子程序将不能被正常调用。
子程序设计→弹出“设计子程序”窗体,选择要设计的子程序→进入子程序设计界面,设置进出口位置。
子程序调用:
浮动窗体工具箱→子程序页面→选择子程序拖到相应位置
控制系统程序设计:
根据计算机的控制任务,采用模块化的设计方法,将机器人的整个运动过程分为六个部分:
向前运动、向后运动、左转、停止、避障、循线。
1.前进子程序:
将马达M1和M2的速度都调为3,旋转方向为逆时针。
2.后退子程序:
将模块中的马达输出M1和M2的速度调为4,方向为顺时针旋转。
3.左转子程序:
将模块中的马达输出M1和M2的速度调为4,其中M1的运动方向为逆时针旋转、M2的运动方向为顺时针旋转。
4.停止子程序:
将电动机M1和M2的动作状态调为停止。
5.避障子程序:
设置距离传感器D1的判断距离即:
D1<12cm,若距离不小于12cm则程序从Y/N分支的N分支出来→M4灯灭→程序结束。
而若距离小于12cm则程序从Y/N分支的Y分支出来→M4灯亮→智能车停止→延时1S→智能车后退;距离传感器继续判断距离,判断条件:
D1>13cm,如果距离不小于13cm则程序回到判断起点,继续循环。
反之,程序从Y/N分支的Y分支出来→智能车停止→智能车左转→延时0.5S→程序结束。
6.循线子程序:
程序开始→智能车左转→循环计数开始,循环计数从=1开始,判断计数器的数值是否大于预定的循环计数10,若不大于10则从(N)口出→轨迹传感器I3开始判断,若搜寻到轨迹→M3灯亮→智能车停止→子程序出口;若未搜寻到轨迹→判断轨迹传感器I4是否搜寻到轨迹,若搜寻到轨迹→M3灯亮→智能车停止→子程序出口;若I4未搜寻到轨迹→M3灯灭→循环计数器开始→连接避障子程序→若遇到障碍,执行避障程序,然后返回程序入口;若未遇到障碍,则循环计数+1。
若循环计数大于10则从(Y)口出→智能车前进→循环计数开始,循环计数从=1开始,判断计数器的数值是否大于预定的循环计数5,若大于则从(Y)口出→返回程序入口。
若不大于5则从(N)口出→轨迹传感器I3开始判断,若搜寻到轨迹则智能车停止→程序结束;若未搜寻到轨迹继续判断I4是否搜寻到轨迹→若搜寻到轨迹则智能车停止→程序结束;若未搜寻到轨迹→脉冲计数器开始→智能车执行避障程序,如果未遇到障碍则循环计数器+1,若遇到障碍则返回程序起点。
主程序设计:
程序开始→执行搜寻子程序→判断轨迹传感器I3是否搜寻到轨迹,若I3搜寻到轨迹→判断I4是否搜寻到轨迹,若I4搜寻到轨迹→智能车前进→执行避障子程序→返回I3起点;若I4没有搜寻到轨迹,电动机M1停止、M2逆时针旋转→执行避障子程序。
若I3没有搜寻到轨迹→判断I4是否搜寻到轨迹,若I4搜寻到轨迹→电动机M1逆时针旋转、M2停止→执行避障子程序;若I4未搜寻到轨迹→执行stop子程序→返回搜寻起点。
六、实验总结
说实在的,在大学甚至是从小到大,都没有做过这种类型的实验。
实验相当有趣、新颖并且充满了挑战性。
虽然,实验时间有点短,并且实验条件相对比较简陋。
这完全阻挡不了同学们的热情,大家对待实验都挺认真的。
我试着编了一个小小的程序,那个小机器也不怎么灵,但最后还是动了……感觉挺有成就感的。
 升级会员
升级会员 