机器人构造.docx
《机器人构造.docx》由会员分享,可在线阅读,更多相关《机器人构造.docx(14页珍藏版)》请在冰豆网上搜索。
机器人构造
机器人构造
机器人基本结构图
一(德国NCF直角坐标机器人
三维直角坐标机器人,故名思议,是以空间三维为基础,三坐标导轨作为硬件支撑,加装专有设备,形成特种专机。
德国麦克福公司(NCF)是世界上最著名的直角坐标机器人研发生产厂家之一,1860年即开始生产各种齿轮。
1960年开始致力于高精密伺服电机专用行星减速机的生产及直角坐标机器人的设计与研发。
研发生产所有与机器人及应用有关的产品,如多种规格的直线导轨、各种手爪、减速机等。
德国麦克福公司在短时间内可以提供各种规格的直线导轨、二维、三维标准机器人及用户专用机器人和生产线。
这些机器人可以装备焊枪、各种通用手爪或专用工具。
它们按需要在定义好的3D空间内可靠、精确、快速地定位,沿直线或圆弧插补运动,完成焊接、搬运和上下料、包装、码垛、拆垛、检测、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。
由于所有部件全部自己生产,使得机器人整体性能更加优异。
十多年来出厂的机器人和生产线全部在正常工作,深受包装机械、印刷机械、汽车工业、食品生产工业、电子工业、机器制造业和化妆品生产等行业新老用户的厚爱。
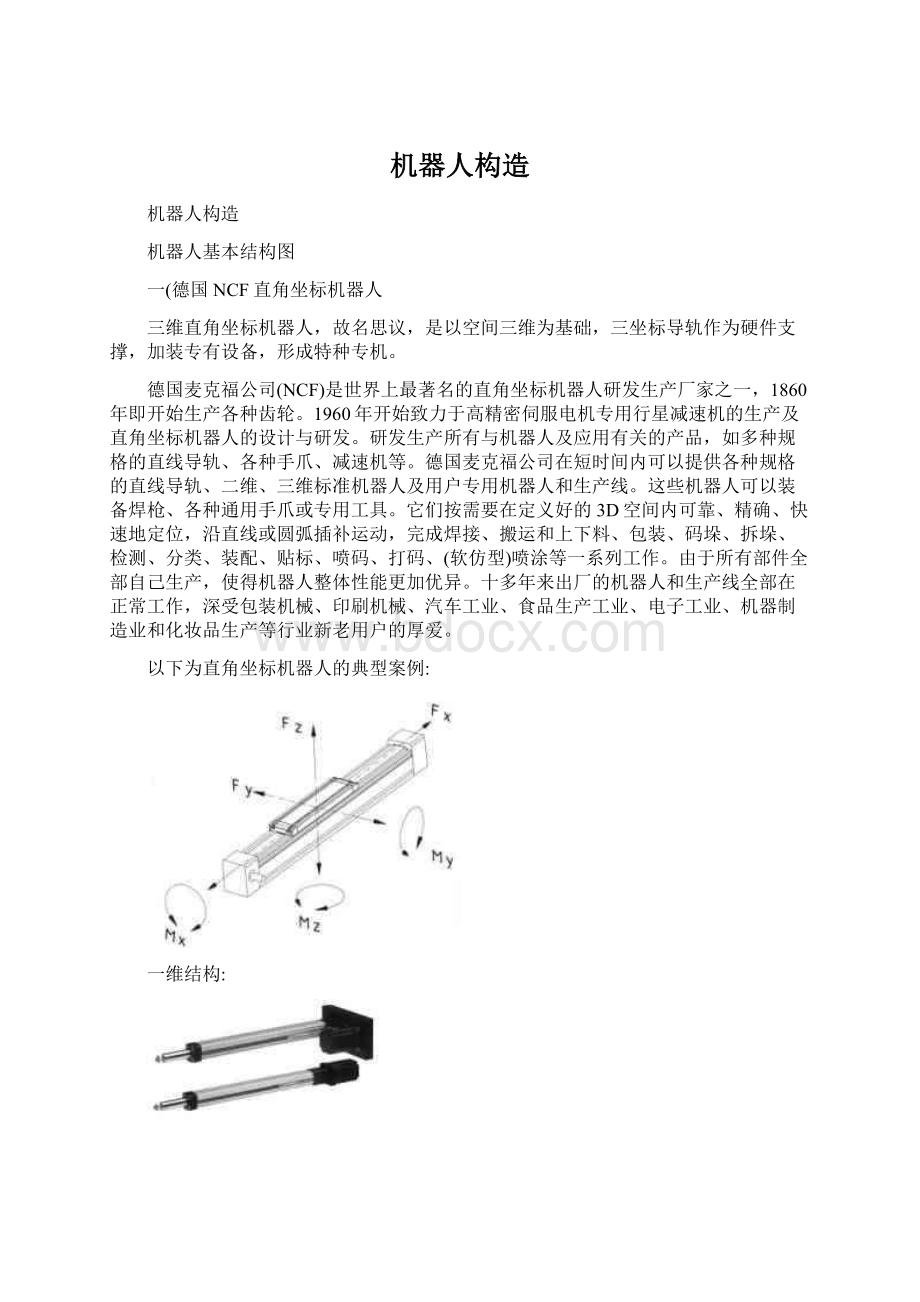
以下为直角坐标机器人的典型案例:
一维结构:
-1-1=425N;V=1.25m/s;r=3000min;重复F=1680N;V=1.25m/s;r=3000min;重FX大大大X大大大F=425N;V=5m/s;a=10m/s2;重复定位X大大大
定位精度:
?
0.02mm/m;最大长度L=5m;F复定位精度:
?
0.02mm/m;最大长度L=0.5m。
Z精度:
?
0.05mm/m;最大长度L=5m;F=850N;Z大=1500N;M=16Nm;M=80Nm;M=32Nm.若增大XYZM=16Nm;M=80Nm;M=32Nm.若增加外置导轨XYZ加外置导轨可增加承载能力和扭矩能力。
可增加承载能力和扭矩能力。
FFB系列;V=5m/s;a=18m/s2;重复定FGA齿轮齿条系列;重复定位精度:
?
大大FZA系列;F=2810N;V=5m/s;a=18m/s2;X大大大
位精度:
?
0.05mm/300mm;最大长度L=20m;0.05mm/300mm;最大长度L=5200mm;Fy大重复定位精度:
?
0.05mm/300mm;最大长度F=2810N;F=2550N;F=2550N;M=124Nm;=30000N;F=30000N。
X大y大Z大XZ大L=5788mm;F=2550N;F=2550N;M=124Nm;y大Z大XM=168Nm;M=169Nm.YZ
M=168Nm;M=169Nm.YZ
FGA齿形带系列;重复定位精度:
?
DGZ系列;V=5m/s;a=18m/s2;重复定SQ-II齿轮齿条系列;V=定制;重复定位大大大0.05mm/300mm;最大长度L=5200mm;F大位精度:
?
0.05mm/300mm;最大长度精度:
?
0.05mm/300mm;最大长度X
=4700N;F=30000N;F=10000N。
L=3760mm;F=1000N;F=1550N;FL=29530mm;F=定制;F=2550N;Fy大Z大X大y大Z大X大y大Z大
=1570N;M=29Nm;M=52Nm;M=52Nm.=2550N;M=124Nm;M=201Nm;M=501Nm.XYZXYZ
TCA系列;最小螺距为5mm,最大螺距为20mm;丝杆单轴龙门结构,由两根丝杆导轨构成,DBA系列;V=5m/s;a=18m/s2;重复定大大
重复定位精度:
?
0.05mm/300mm;最大长度且由一个伺服电机驱动,最长长度可达位精度:
?
0.05mm/300mm;最大长度L=2924mm;F=3400N;F=5000N;F2924mm,最小螺距为5mm,最大螺距为20mm,X大y大Z大L=3750mm;F=3200N;F=5000N;F=6000N;X大y大Z大=6000N;M=380Nm;M=430Nm;M=370Nm.水平承载力可达10000N。
XYZ
M=380Nm;M=430Nm;M=370Nm.XYZ
丝杆单轴龙门结构,由两根丝杆导轨构成,皮带单轴龙门结构,由一根皮带主动导轨和皮带单轴龙门结构,由两根皮带主动导轨构
且由两个伺服电机驱动,最长长度可达一根从动导轨构成,且由一个伺服电机驱成,且由一个伺服电机驱动,最长长度可达2924mm,最小螺距为5mm,最大螺距为20mm,动,最长长度可达5750mm,V=5m/s,a=18大大5750mm,V=5m/s,a=18m/s2,水平承载大大水平承载力可达10000N。
m/s2,水平承载力可达10000N,若选择力可达10000N,若选择D-LINE系列承载力将D-LINE系列承载力将会更高。
会更高。
两维结构:
皮带式两维龙门结构,由两根皮带主动导轨构丝杆式两维龙门结构,由两根丝杆主动导皮带式两维龙门结构,由一根皮带主动导轨成X轴结构,且由一个伺服电机驱动,Y轴也是轨构成X轴结构,且由两个伺服电机驱动,构成X轴结构,且由一个伺服电机驱动;Z由一根皮带主动导轨构成,形成两维结构,各Y轴也是由一根丝杆主动导轨和一根从动轴也是由一个根皮带主动导轨垂直连接在X轴总长度可达5750mm,V=5m/s,Y轴水平承载导轨构成,形成两维结构,各轴总长度可轴带滑块上构成,形成两维结构,各轴总长大
力可达5000N(与跨度有关),若选择D-LINE达5750mm,V=5m/s,Y轴水平承载力可度可达5750mm,V=5m/s,Z轴垂直承载力大大系列承载力将会更高。
达30000N(与跨度有关)。
可达4700N。
皮带式两维龙门结构,由一根皮带主动导轨和
一根辅助导轨构成X轴结构,且由一个伺服电机
驱动,Z轴也是由一根皮带主动导轨构成,形成
两维结构,各轴总长度可达5750mm,V=5m/s,大
Z轴垂直承载力可达4700N。
三维结构:
丝杆式三维龙门结构,由两根丝杆主动导轨皮带式三维龙门结构,由两根皮带式主动导皮带式三维悬臂结构,由一根皮带主动导轨构成X轴结构,且由二个伺服电机驱动,Y轴轨构成X轴结构,且由一个伺服电机驱动,和一根从动导轨构成X轴结构,且由一个伺也是由一根丝杆主动导轨构成,且另由一根Y轴也是由一根皮带式主动导轨和一根从动服电机驱动;Y轴是由一个根皮带主动导轨Z轴丝杆主动导轨作为垂直轴,形成三维龙导轨构成,且由一根皮带式主动轴导轨垂直水平放置,且滑块与X轴滑块固定,另由一门结构,各轴总长度可达2924mm,V=1m/s,使用,形成三维龙门结构,各轴总长度可达根皮带式Z轴导轨滑块连接到Y轴导轨的端大
Z垂直轴最大承载可达3400N。
5750m(一般X轴可做到20m),V=5m/s,Z部使用,形成三维的悬臂结构,各轴总长度大
轴垂直承载力可达2810N(与跨度有关)。
可达1500mm(一般X轴可做到20m),V大
=5m/s,Z轴垂直承载力可达2810N(与Y轴
长度有关)。
皮带式三维壁挂结构,由二根皮带主动导轨皮带式三维龙门结构,由两根皮带式主动导丝杆式三维悬臂结构,由一根丝杆式主动导垂直使用构成X轴结构,且由一个伺服电机轨构成X轴结构,且由一个伺服电机驱动,轨构成X轴结构,且由一个伺服电机驱动;驱动,Y轴由一根皮带式主动轴导轨和一根Y轴也是由一根皮带式主动导轨和一根从动Y轴是由一根丝杆式主动导轨水平放置,且从动轴导轨水平使用构成,由一个伺服电机导轨构成,且由一根皮带式主动轴导轨垂直导轨与X轴滑块固定,另由一根丝杆式Z轴驱动,Z轴也是由一根皮带主动导轨水平构使用,形成三维龙门结构,各轴总长度可达导轨滑块连接到Y轴导轨的滑块上使用,形成,由一个伺服电机驱动,形成三维壁挂结=5m/s,Z成三维的悬臂结构,各轴总长度可达1500mm5750m(一般X轴可做到20m),V大
构,各轴总长度可达5750mm,V=5m/s,Z轴垂直承载力可达2810N(与跨度有关)。
(一般X轴可做到2924mm),V=5m/s,Z大大轴端部水平承载力可达1000N(与Z轴导轨长轴垂直承载力可达3400N(与Y轴长度有度及Y轴跨度有关)。
关)。
多维结构:
丝杆式四维龙门结构,由两根丝杆主动导轨皮带式多维龙门结构,由两根皮带式主动导皮带式多维龙门结构,该结构是在普通皮带构成X轴结构,且由一个伺服电机驱动,Y轴轨构成X轴结构,该单根导轨上可以装置两式三维龙门结构的基础上,在Z轴滑块上加也是由一根丝杆主动导轨构成,Z轴是由两个电机进行独立控制两个滑块运行,另由两装了两个旋转轴,形成了多轴运动机构,该个可以独立运行的丝杆导轨构成,这样形成套Y、Z轴导轨分别安装在X轴的两个滑块结构各轴长度可达5750mm(一般X轴可做到了四维龙门结构,各轴总长度可达2924mm,上,形成了多轴运动结构,各轴总长度可达20m),V=5m/s,Z轴垂直承载力可达2810N大
V=1m/s,Z垂直轴最大承载可达3400N。
5750mm(一般X轴可做到20m),V=5m/s,(与Y轴长度有关)。
大大
Z轴垂直承载力可达2810N(与跨度有关)。
二(6自由度机械手
沈阳鼎冷机电设备有限公司于2007年开始从事机器人周边设备的设计与研发,经过近两年的
时间,我公司所做的项目已经覆盖了搬运、装配、喷涂、焊接等多个领域。
如下应用案例:
拧扣机械手非防爆喷漆机械手
焊接机械手搬运机械手
涂胶机械手去毛刺机械手
贴标签机械手锻压搬运机械手
 升级会员
升级会员 