各式控制方式.doc
《各式控制方式.doc》由会员分享,可在线阅读,更多相关《各式控制方式.doc(12页珍藏版)》请在冰豆网上搜索。
各式控制方式
一、实习台配线
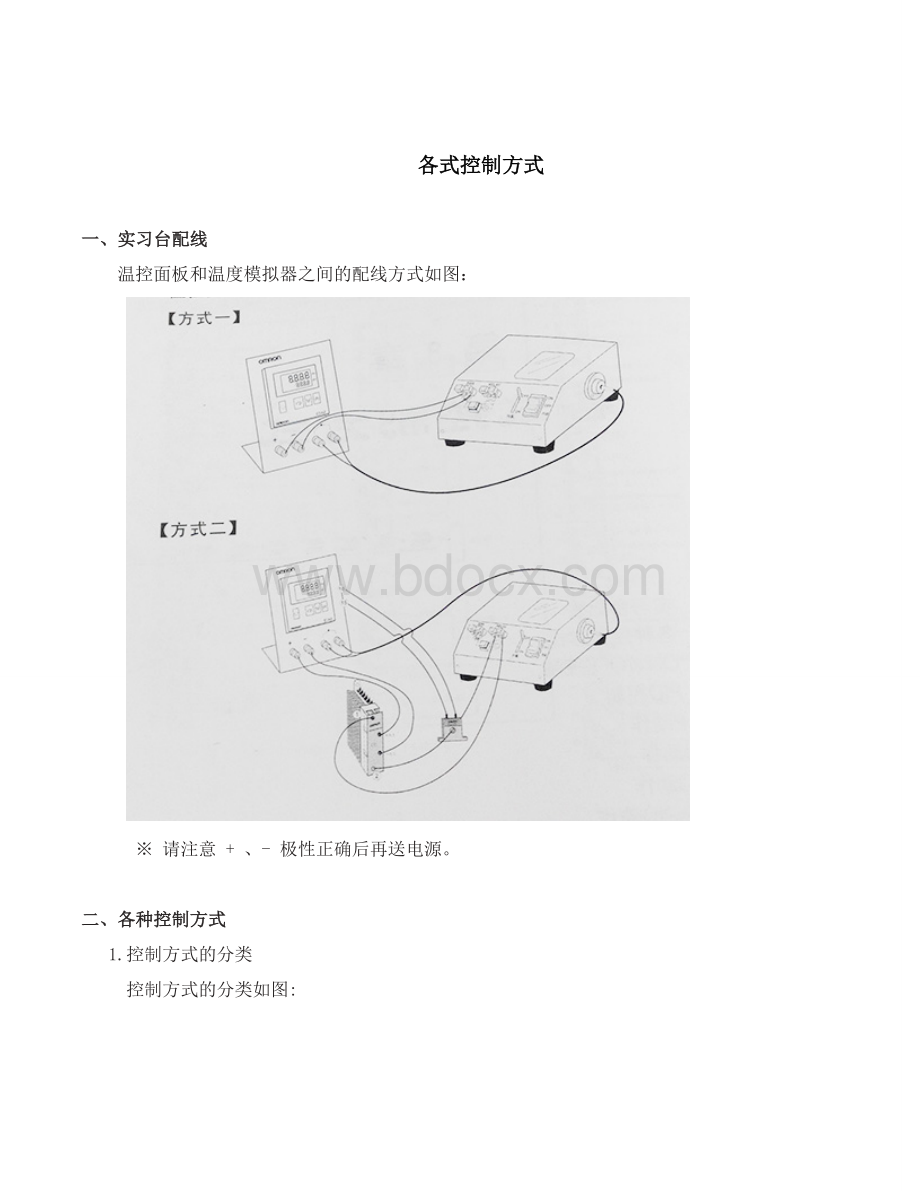
温控面板和温度模拟器之间的配线方式如图:
※请注意+、-极性正确后再送电源。
二、各种控制方式
1.控制方式的分类
控制方式的分类如图:
2.PID控制
(1)在ON/OFF控制中,会出现上冲(Overshoot)或振荡(Hunting)现像。
因此无法对应如工厂所求之高精度温度控制。
由ON/OFF控制开始平顺地升温并到达设定的温度后再使温度保持一定状态的稳定控制方法为PID控制。
(2)所谓PID控制即是在达到设定温度前,便开始调整对加热器的输出。
于设定温度附近一边重复进行着ON/OFF,一边调整,最后接近设定温度值。
如此的做法可抑制上冲或振荡现象。
此外,当保持在设定温度之际,若因不明原因形成的外部扰乱使恩度下降后,亦可快速恢复到原来的温度。
为了达到如此的控制模式,输出的ON/OFF动作比ON/OFF控制更加频繁为其特征。
3.自动调谐
要达到熟练的PID控制,必须调整温控器本体中的各种设定。
调谐为了要进行简单的设定,有些温控器具备有自动调谐的功能,在必要的时候按下AT键,便会自动对PID控制执行必要的设定。
三、ON/OFF控制
温度低于设定值时,加热器100%ON;高于设定值时,OFF。
以此类方式将设定值定为边界,利用ON,OFF动作使温度保持一定的控制方式,称为ON/OFF控制。
此外,操作量以设定值为边界,因为是两种数值的动作缘故,所以也被称为2位置动作。
如图:
1.上冲(Overshoot)
①在ON/OFF控制时,由起动电源开始到达设定温度为止,加热器会持续ON.当温度达到设定值时,即使加热器OFF,因其残余热量的关系,会有温度超过设定值的现象,称为上冲(Overshoot)。
②上冲的大小与测量体的反应,加热器的容量,加热器和测温部间的热传导性等因素有关。
2.振荡(Hunting)
由于在ON/OFF控制中,加热与放热的反应迟缓,使相对于设定值的温度无法保持固定而有上下变动(振动)的现象发生,称为振荡(Hunting)。
其周期称为振荡周期,其幅度称为振荡幅度。
3.迟滞
若以1点作为ON/OFF控制其输出会产生颤动或易受杂讯影响,而对于输出继电器的寿命与被连接的装置造成不良的影响。
为了防止上述影响,可在ON和OFF设定的动作上设定误差值,该值称为迟滞(HYS:
hys-teresis),如图:
(1)将调解灵敏度设定为较小值;希望加热反应,放热反应变快,控制特性上振荡变大的场合。
(2)将调节灵敏度设定为较大值:
.杂讯重叠在输入上,测温体的反应快速稍微的热变动既有反应。
频繁的ON/OFF输出多场合。
.对冷却用压缩机等频繁地ON/OFF动作有不良影响的场合。
四、PID控制
比ON/OFF控制更为平滑的起动,到达设定值后可保持一定温度。
此为接近适当控制(=理想)的方式。
五、P动作
所谓P动作即用来消除上冲(Overshoot)及振荡(Hunting)现象的动作。
在对应设定值时,存在有比例带(Proportionalband),其中操作量(控制输出量)与偏差值作比例变化。
一般的加热控制中,现在温度较比例带为低时,操作量为100%。
进入比例带后,操作量随着偏差值比例变小。
当设定值与现在温度达到一致(无偏差)时,操作量为50%;高于比例带时,操作量为0%(OFR=50时)。
因为Proportional(比例)之故,所以称为P动作。
比例带:
偏差与操作量为比例关系的范围(单位:
℃或%),如图:
1.控制周期(CP:
ControlPeriod)与时分割比例控制
时分割比例动作:
利用变化电磁开关(MC:
MagnetContactor)、SSR(SolidStateRelay)等ON/OFF开闭器的ON/OFF 时间比率,连续地使操作量可变的方法,如图:
亦称为时间比例式控制动作。
此时作为ON时间与OFF时间的比例基准的时间周期称为控制周期。
想要使用ON/OFF开闭器进行PID控制时,预先设定此控制周期,再由被设定的控制周期决定ON/OFF的时间。
例如:
操作量为50%时,ON:
OFF=1:
1,各以设定后的控制周期的一半时间进行ON/OFF动作。
此外,控制周期因操作器,负载的形态而变异。
一般而言,电磁开关设定为20s,SSR为2s左右。
但反应哭诉的对象必须注意因控制周期而发之振荡(Hunting)现象。
电流输出的场合中,在比例带内因4~20mA的连续输出的缘故,并无控制周期。
2.偏移(Offset)
在比例动作上,一旦控制对象的热容量、加热器容量及设定值等发生不平衡,即使到达稳定状态,相对于设定值下方或上方持续生成一定的误差,但仍可维持平衡及稳定,如图:
此误差称为偏移(Offset)或定常偏差。
越缩小,比例带偏移越小。
但若比例带太窄,则会发生振荡现象。
3.偏移(Offset)的改善
具备偏移(Offset)复位(OFR)功能的温控器,可借由调节该功能以改善偏移,如图:
利用OFR移动比例带,在设定值上温度趋于平衡时设定OFR。
具有积分动作功能的温控器自动修复偏移使用在P动作、PD动作时。
六、I动作
随着输入时间的积分值作比例输出的控制动作。
以积分动作自动地修正比例动作下发生的偏移,使现有的温度与设定值一致。
因为利用Integral(积分)消除P动作的偏移(Offset),所以也称为复位动作,如图:
通常不单独使用I动作,而是使用于与P动作组合而成PI控制或与P、D动作组合而成PID控制。
1.积分时间
对步阶状的偏差而言积分的操作量达到和比例动作相同值为止的时间称为积分时间,如图:
积分时间越短,积分动作越强。
但积分时间一旦太短,订正动作则太强烈,反而造成振荡(Hunting)现象的原因。
2.积分的时间调整
一般而言,积分时间由长时间调整到短时间。
生成缓慢的振荡(Hunting)场合。
重复上冲(Overshoot)、低辐射收敛的场合,多为太强的积分动作。
若延长此积分时间,则可消除振荡现象。
与加大比例带相同所用,减弱积分动作亦可达到同样结果。
七、D动作
与输入的时间微分值作比例输出的输出控制动作,如图:
因为比例控制或积分动作都是针对控制结果进行订正动作的缘故,因此对于外部扰乱等反应比较迟钝的微分动作就是用来补偿上述的缺点。
追加与温度变化的倾斜成比例的操作量,以实施订正动作。
对于激烈的外部扰乱施加大的操作量,以便快速恢复到原来的控制状态。
D动作并不单独被使用,而是与P组合而成PD动作,或以PID控制方式被使用。
因Derivative而称为D动作。
在海外也被称为比率(Rate)动作。
1.微分时间
表示微分动作强度的常数称为微分时间,如图:
相对于斜坡(Ramp)状的偏差,微分的操作量达到与比例动作相同操作量的时间称为微分时间。
微分时间越长,由微分动作所产生的订正越强。
一旦微分时间设定过长时,大幅操作量将持续作用,反而造成干扰。
通常,与起因于不适当的比例带。
积分时间的振荡比较,生成更短周期的振荡。
2.微分时间的调整
微分时间一般由短时间调整至长时间。
在短周期中生成振荡(Hunting)现象的场合,可被视为控制系统的反应快速,微分动作太强。
此时将微分时间缩短。
组合各P、I、D动作,以形成接近理想控制之PID控制。
八、2-PID动作
既有的PID控制方式为将针对目标值的反应和针对外部扰乱的反应利用同一调节部施行控制,如图:
因而当重视目标反应时(一般而言,P较大、I亦较小),对外部的反应变慢;但若重视外部扰乱的反应时间(一般而言,P、I较小,D较大),目标值的反应将造成上冲(Overshoot)有相当大的振动。
因此两者的反应无法同时满足,此为其缺点。
在2自由度的PID控制上,各自独立设定目标值反应特性和外部扰乱反应特性,所以是一种可以同时满足两者反应的方式。
借由改变2自由度PID参数、α(ALFA)可设定其强度。
九、PID最适合的设定
PID常数因控制对象的特征性而异。
根据温度特性导出PID常数的代表性方法有ZieglerNichols开发的步阶反应法、界限灵敏度法、极限循环法。
以温控器自动计算出PID常数。
利用上述方式计算具备自动调谐、自我调谐功能的温控器。
虽然计算出的PID常数通常不会有什么问题,但若因用途不同造成不合适结果时,则以手动调整。
1.最适合的PID 调整法
(1)步阶反应法(stepresponsetuning)
针对控制对象由热平衡状态开始,以步阶状输出操作量100%,计测无效时间L(min)和最大温度斜度R(%/min或 ℃/min),在由R和L计算出PID常数,如图:
虽然不会对控制对象造成不良影响,但却不适用于运转开始时和运转时,控制对象的特性有变化的场合。
(2)限界灵敏度法
仅对温控器实行P动作(I=0、D=0)。
将P值由大渐渐调到小,观测使其开始发生振荡(Hunting)的点。
借由此时的比例带宽幅Pb与振荡周期t(s或min)算出常数。
(3)极限循环法
对温控器作ON/OFF控制,或设定P=0、I=0、D=0进行控制。
此时根据发生之振荡周期T(s或min)和振幅H(%或 ℃)求出最适当的PID数值。
温度变动会加诸于控制对象,所以必须留意。
2.自动调谐
温控器本身可自动地设定适当的PID常数。
该方法是对温控器指示实行自动调谐,以便针对运转时的目标值自动算出最适当的PID常数。
使用极限循环法的场合,必须注意的是为了求得特性而强制变化操作量导致自动调谐中发生振荡。
因此在不良的或不适合的控制对象上,不使用自动调整而改以手动调整。
 升级会员
升级会员 