液压传动.docx
《液压传动.docx》由会员分享,可在线阅读,更多相关《液压传动.docx(35页珍藏版)》请在冰豆网上搜索。
液压传动
绪论
本章重点:
液压传动的工作原理
1.液压传动的发展概况
液压传动相对于机械传动来说,是一门比较新的学科,从1795年英国制造出世界上第一台水压机至今,已经历了二三百年的历史,但广泛应用和推广仅有六、七十年。
19世纪末,德国制造出液压龙门刨床,美国制成液压六角车床和磨床,但因当时没有成熟的液压元件以及受制造工艺水平的限制,液压传动技术的应用仍不普遍。
二战期间,一些兵器由于采用了反应快、精度高、功率大的液压传动装置,大大提高了兵器的性能,同时推动了液压技术的发展。
战后,液压传动技术迅速转向民用,广泛地应用于机械制造、工程建筑、石油化工、交通运输、军械、矿山冶金、航空航海、轻工、农林渔业等行业,在宇宙航行、海洋开发、核能建设、地震预测等新的技术领域中也得到应用。
二十世纪60年代后,随着原子能、空间技术、计算机技术的发展,液压技术的应用更加广泛。
目前,该项技术正在向高压、高速、高效、大流量、大功率、低噪声、长寿命、高度集成化和模块化、高可靠性及污染控制的方向发展。
同时,随着计算机辅助设计、计算机仿真和优化、微机控制等技术在液压元件和液压系统设计中的快速应用,又使液压技术的发展进入了一个新的阶段。
2.液压传动的工作原理
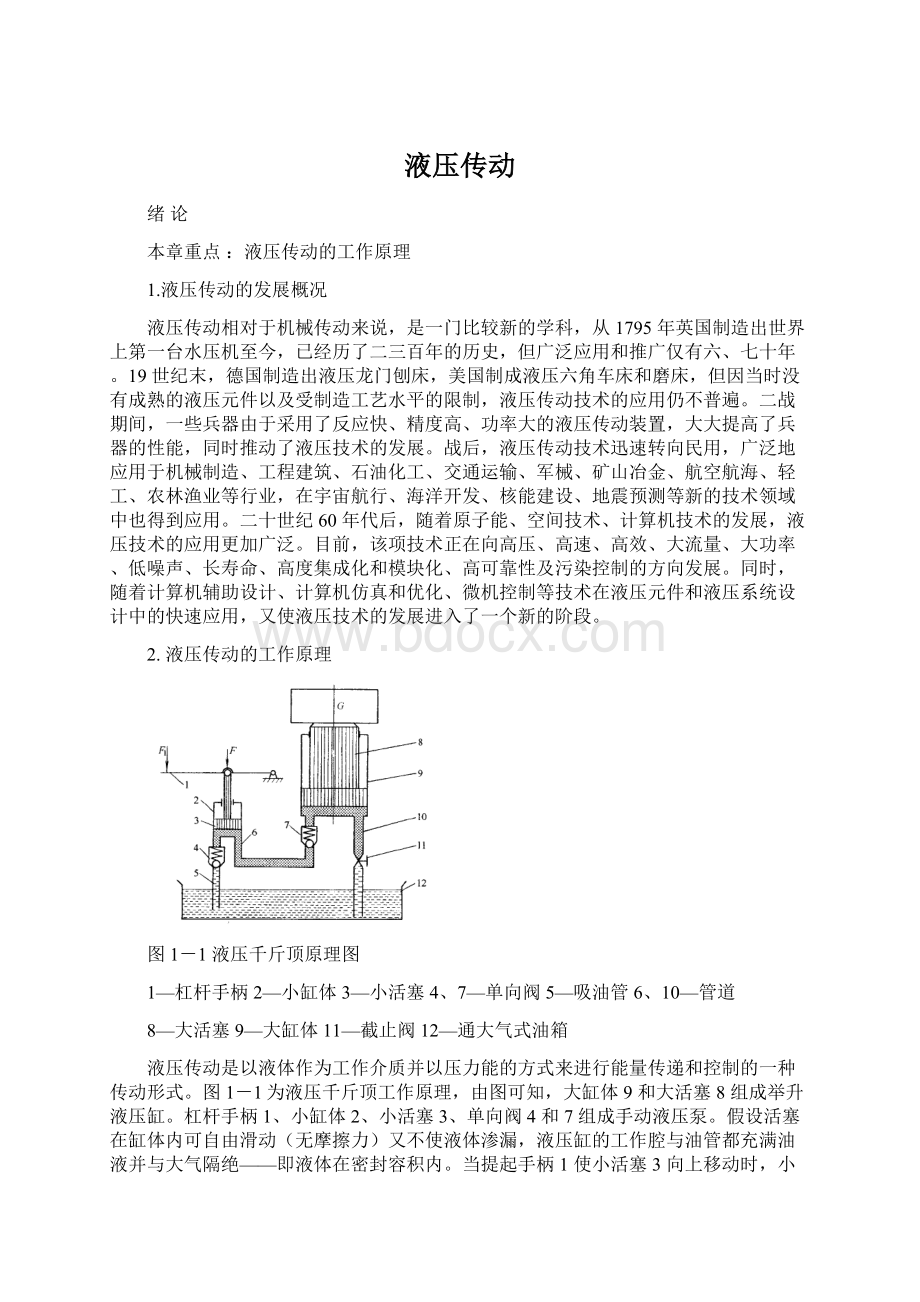
图1-1液压千斤顶原理图
1—杠杆手柄2—小缸体3—小活塞4、7—单向阀5—吸油管6、10—管道
8—大活塞9—大缸体11—截止阀12—通大气式油箱
液压传动是以液体作为工作介质并以压力能的方式来进行能量传递和控制的一种传动形式。
图1-1为液压千斤顶工作原理,由图可知,大缸体9和大活塞8组成举升液压缸。
杠杆手柄1、小缸体2、小活塞3、单向阀4和7组成手动液压泵。
假设活塞在缸体内可自由滑动(无摩擦力)又不使液体渗漏,液压缸的工作腔与油管都充满油液并与大气隔绝——即液体在密封容积内。
当提起手柄1使小活塞3向上移动时,小活塞下端油腔容积增大,形成局部真空,此时单向阀4被打开,通过吸油管5从油箱12中吸油;当压下手柄,小活塞下移,小活塞下腔压力升高,单向阀4关闭,单向阀7被打开,下腔的油液经管道6流入大缸体9的下腔,使大活塞8向上移动,顶起重物。
为防止再次提起手柄吸油时,举升缸下腔的压力油逆向流入手动泵(小缸),设置一单向阀7,使其自动关闭,油液不能倒流,以保证重物不会自行下落。
往复扳动手柄,就能不断地将油液压入举升缸下腔,使重物逐步升起;当打开截止阀11,举升缸下腔的油液通过管道10、阀11流回油箱,大活塞在重物和自重作用下回到原始位置。
由此得出结论:
密封容积中的液体既可以传递力,又可以传递运动。
因此液压传动又称容积式液压传动传动。
3.液压传动系统实例
图1-2磨床工作台液压系统工作原理图
1-油箱2-过滤器3-液压泵4-溢流阀5、7-换向阀
6-节流阀8-液压缸9-工作台
尽管液压传动应用广泛,但其工作原理是相同的。
下面以平面磨床工作台往复直线运动的液压系统为例进行分析。
如图1-2(a)所示,液压泵3由电动机带动从油箱1中吸油,油液经过滤器2进入液压泵吸油腔,输出进入压力油路后,通过换向阀5、节流阀6,经换向阀7进入液压缸8的左腔。
液压缸8的缸体固定不动,活塞便在油液压力的推动下,带动固定在活塞杆上的工作台9向右运动,此时液压缸右腔的油液经换向阀7和回油管排回油箱。
若将换向阀7的手柄置成图1-2(b)所示状态,则经节流阀6的压力油将由换向阀7进入液压缸的右腔。
此时液压缸左腔的油经换向阀7和回油管排回油箱,液压缸8中的活塞将推动工作台9向左移动。
若系统中换向阀5处于图1-2(c)的位置,则液压泵输出的压力油将经换向阀5直接回油箱,系统处于卸荷状态,液压油不能进入液压缸,所以换向阀5又可称为开停阀。
转换换向阀7,即可变换压力油进入液压缸8的方向,从而实现工作台往复运动。
工作台的运动速度可通过改变节流阀6的开口量进行调节,当开口大时,单位时间内进入液压缸的油液增多,工作台的运动速度变快,开口小时,运动速度变慢。
为克服工作台的摩擦力、切削力等各种阻力,液压缸必须输出足够大的推力,这由液压泵输出的压力来保障,根据不同工作情况,液压泵输出的油液压力由溢流阀4进行调整。
通常,由于电机转速一定,使液压泵单位时间内输出的油液体积也为定值,而输入液压缸的油液多少由节流阀6调节,因此液压泵输出的多余油液须经溢流阀4流回油箱1。
4、液压系统图的图形符号
为了简化液压原理图的绘制,国家标准(GB/T786.1-93)规定了“液压气动图形符号”,这些符号只表示元件的职能,不表示元件的结构和参数。
一般液压传动系统图均应按标准规定的图形符号绘制,若某些元件无法用图形符号表示,或需着重说明系统中某一重要元件的结构和动作原理时,允许采用结构原理图表示。
图1-3即为用图形符号绘制的图1-2所示的磨床工作台液压系统工作原理图。
图1-3磨床工作台液压系统图形符号图
1-油箱2-过滤器3-液压泵4-溢流阀5、7-换
向阀6-节流阀8-活塞9-液压缸10-工作台
5、液压元件的组成
(1)动力元件——液压泵将机械能转换为液压能装置,给整个系统提供压力油。
(2)执行元件——液压缸或液压马达将液压能转换为机械能,可克服负载做功。
(3)控制元件——各种阀类可控制和调节液压系统的压力、流量及液流方向,以改变执行元件输出的力(或转矩)、速度(或转速)及运动方向。
(4)辅助元件——油管、管接头、油箱、过滤器、蓄能器和压力表等起连接、贮油、过滤、贮存压力能和测量油液压力等作用的辅助元件。
(5)工作介质——传递压力的工作介质通常为液压油,同时还可起润滑、冷却和防锈的作用。
6、液压传动的优缺点
液压传动与机械传动、电气传动、气压传动相比较有以下优点:
(1)功率相同的情况下,体积小、重量轻、结构紧凑、惯性小,可快速启动和频繁换向,能传递较大的力和转矩。
(2)能方便地实现无级调速,且调速范围大,可达100:
1至2000:
1。
而最低稳定转速可低至每分钟几转,可实现低速强力或低速大扭矩传动,不需减速器。
(3)传递运动均匀平衡、方便可靠;负载变化时速度较稳定。
(4)控制调节方便、省力,易于实现自动化;与电气控制或气动控制配合使用,能实现各种复杂的自动工作循环,还可远程控制。
(5)易于实现过载保护;液压元件可自行润滑,使用寿命较长。
(6)液压元件易实现标准化、通用化、系列化,便于设计制造和推广使用;元件之间用管路连接时,在系统中的排列布置有较大的机动性。
(7)实现直线运动一般比机械传动简单。
液压传动装置存在的不足:
(1)由于采用液体传递压力,系统不可避免地存在泄漏,因而传动效率较低,不宜于远距离传动。
(2)对油温变化较敏感,运动件的速度不易保持稳定,同时对油液的清洁程度要求高。
(3)为减少泄漏,液压元件制造精度要求高,加工工艺复杂,因而成本较高。
(4)系统发生故障时,不易查找原因和维修。
(5)系统或元件的噪声较大。
本章小结:
这节课我们主要讲了液压传动的发展概况,通过液压千斤顶的讲解得到液压传动的基本原理。
第二章液压流体力学基础
第一节液压油
一、工作介质的主要物理性质
1.密度:
密度是液体单位体积的质量,即
(1-1)
式中m——液体的质量;V——液体的体积。
一般条件下,由于工作介质的密度随温度和压力的变化很小,常把液体的密度当作常量使用。
2.液体的可压缩性
(1)液体的可压缩性
液体所受压力增加时体积变小的性质叫液体的可压缩性。
其定义为单位压力变化时液体体积的相对变化量,用体积压缩系数κ表示,即
式中κ——压缩系数;Δp——压力的变化值;
V0、ΔV——分别表示液体的初始体积和受Δp作用后的体积变化值。
由于Δp增加时ΔV为负增长量,为使κ为正值,上式右项前有一负号。
在实际使用时,常用κ的倒数K来衡量液体的可压缩性,K称为液体的体积弹性模量。
(1-2)
石油型液压油的K=(1.4~2.0)×103MPa。
考虑到一般液压系统中难避免混入气体,所以在计算时常常取K=(0.7~1.4)×103MPa。
压力变化不大时,液体体积变化很小,因此在讨论系统的静态特性时,通常不考虑油的可压缩性,而在研究液压系统的动态特性时,油的可压缩性则为重要因素。
(2)液压弹簧的刚度系数
在变动压力下,液压油可压缩性的作用如一个弹簧,即压力升高,油液体积减小;压力降低,油液体积增大。
这个弹簧的刚度可用如下方法求出(见图1-1)。
当作用在封闭液体上的外力发生ΔF的变化时,如果液体承压面积A不变,则液柱的长度有Δl的变化。
体积变化为ΔV=A·Δl,压力变化为Δp=ΔF/A,代入式(1-2)中可得
(1-3)
故
(1-4)
式中Kh——液压弹簧的刚度系数,单位N/m。
3.粘性
(1)粘性的意义
液体在外力作用下流动时,液体分子间的内聚力阻碍其分子间的相对运动而产生一种内摩擦力的现象称为液体的粘性。
粘性的大小用粘度衡量。
粘度是选择液压油的主要依据。
以图1-2所示的两平行平板中液体的流动情况为例,由于各层的运动速度不同,快的流层会拖曳慢的流层,而慢的流层又阻滞快的流层,层与层之间就是因为存在粘性而产生了阻止相对运动的内摩擦力。
实验测定,液体流动时,相邻层间的内摩擦力Ff与液层接触面积A、液层间相对速度du成正比,而与液层间的距离dy成反比,即
(1-5)
如以τ表示剪切应力,即单位面积上的内摩擦力,则有
(1-6)
上式中du/dy称为速度梯度;μ是衡量液体粘性的比例系数,称粘度。
(2)液体的粘度
1)动力粘度μ
系数μ称作动力粘度,又称绝对粘度,因此
(1-7)
物理意义:
速度梯度为l时,接触液体层间单位面积上的内摩擦力即为动力粘度,单位Pa·s(帕·秒)。
2)运动粘度v
运动粘度是动力粘度与密度之比,即
(1-8)
单位是m2/s,在CGS制中用cSt(厘沲),lcSt=10—2cm2/s,
过去,我国机械油的牌号,就是该油液在50℃时的运动粘度v(cSt)的平均值,现已改用40℃时的平均运动粘度表示油的牌号。
表1-1为液压油新旧牌号对照表,旧牌号级前无“N”字符。
3)相对粘度
因动力粘度与运动粘度都难以直接测量,工程上常用一些简便方法测定液体的相对粘度。
相对粘度根据测量条件的不同,各国采用的单位各不相同,我国采用恩氏粘度计来测定油的相对粘度。
恩氏粘度是在某一特定温度下,将200cm3被测油液在自重作用下流过Ф2.8mm的小孔所需的时间t1,与20℃时同体积蒸馏水流过该小孔所需时间t2之比,即恩氏粘度为:
(1-9)
(3)粘度与压力的关系
压力增加时,液体分子间距离缩小,内聚力增大,粘度增大。
一般情况下,压力对粘度的影响较小,可不加考虑。
当压力变化超过20MPa时需考虑压力对粘度的影响。
(4)粘度与温度的关系
液体粘度随着温度升高而降低。
液体的粘度随温度变化的特性为粘-温特性。
工作介质的粘度变化直接影响液压系统的工作性能,因此粘度随温度的变化越小越好。
二、工作介质的分类和选用
1.分类
液压系统中常用的工作介质(包括液压油、液压液及代用液压油)的一般分类如下:
2.选用
(1)选用的原则
(2)粘度的选择
粘度过大,液体流动阻力增加,功率损失大,液压泵吸油困难;粘度过小,则使泄漏增加,容积效率降低,功率损失增加,环境污染。
一般在温度、压力较高及工作部件速度较低时,可采用粘度较高的工作介质,反之宜采用粘度较低的工作介质。
系统中,泵转速最高、压力较大、温度较高,所以一般根据液压泵的要求来确定工作介质的粘度。
此外,为发挥液压装置的最佳运转效率,应根据周围环境温度、使用压力和工作循环等具体情况,考虑设置冷却器和加温器,以控制油温,使工作介质能保持在最佳粘度范围内。
第二章液压流体力学基础
第二节静止液体的力学规律
静止液体是指液体内部质点与质点之间无相对运动。
一、静压力及其性质
静止液体在单位面积上所受的法向作用力称为静压力,在液压传动中简称压力。
压力定义为
若法向作用力F均匀地作用在面积A上,则压力可表示为
(1-10)
式中p——液体的压力;
F——作用在液体上的外力;
A——外力垂直作用的面积。
由于液体具有流动性,故液体静止时不能承受切向力,沿面积ΔA的切向分力恒等于零。
因此,作用于面积ΔA上只有法向分力。
而液体又不能承受拉力,所以法向力的方向只能是指向面积ΔA。
作用于液体上的力,有两种类型:
一种是质量力,作用于液体的所有质点上,如重力和惯性力等;另一种是表面力。
作用于液体的表面上,它可以是其他物体作用在液体上的力,也可以是一部分液体作用于另一部分液体上的力。
液体静压力的两个重要性质:
(1)液体静压力垂直于其承受压力的作用面,其方向永远沿着作用面的内法线方向。
(2)静止液体内任意点处所受到的静压力在各个方向上都相等。
二、在重力作用下静止液体中的压力分布
如图1-4所示,在重力作用下的静止液体中,从自由液面向下取一微小垂直圆液柱,其高度为h,微小圆柱体在重力及周围压力作用下处于平衡状态。
分析其受力:
作用于该液柱侧表面的静压力垂直于该表面,且在各个方向上的静压力均相等;液柱在Z轴方向的力平衡方程式为
消去各项中的ΔA并移项,得出流体静力学基本方程
(1-11)
三、静止液体内压力的传递
由式(1-11)可知,静止液体中任一点的压力都包含了液面上的压力p0,由此得出结论:
在密闭容器中,由外力施加于静止液体表面所产生的压力将以等值同时传递到液体内部各点。
这就是静压力传递原理,即帕斯卡原理。
●液压系统中,由于外力作用产生的压力远大于液体自重产生的压力,因此常常认为在密封容器中静止液体的压力处处相等。
即p≈p0
四、压力的表示方法和单位
压力有绝对压力和相对压力两种表示方法。
绝对压力以绝对真空为基准来进行度量,相对压力以大气压为基准进行度量。
绝对压力=大气压力+相对压力
当静止液体液面上作用的是大气压力pa时,则深度h处的绝对压力为:
p=pa+ρgh
相对压力为:
p=ρgh
绝对压力低于大气压时,习惯上称为真空。
绝对压力不足于大气压力的那部分压力值,称为真空度。
真空度=大气压力-绝对压力
由于作用于物体上的大气压一般自成平衡,所以在分析时,往往只考虑外力而不再考虑大气压。
因此绝大多数的压力表测得的压力均为高于大气压的那部分压力,即相对压力,又称表压力。
压力的计量单位换算:
第二章液压流体力学基础
第三节液体动力学基础
一、基本概念
1.理想液体、一维流动及恒定流动
既有粘性又有可压缩性的液体称为实际液体。
理想液体是指没有粘性、不可压缩的假想液体。
一般的流动都是在三维空间内的流动,流动参数是三个坐标的函数。
二元流动或二维流动:
流动参量是两个坐标的函数的流动。
一元流动或一维流动:
流动参量是一个坐标的函数的流动。
恒定流动:
液体运动参数不随时间变化,仅是空间坐标的函数,因此又叫定常流动或非时变流动。
如任何一个参数是随时间而变化的,就称为非恒定流动或非定常流动。
2.迹线、流线、流管、流束与通流截面
迹线:
液体质点在空间的运动轨迹。
流线:
某一瞬时,在流动液体流场内作的一条空间几何曲线。
非恒定流动时,由于各质点速度随时间改变,所以流线形状也随时间变动。
恒定流动时,流线形状不随时间变化,液体质点的迹线与流线重合,即流线上质点沿着流线运动。
由于空间每一点只能有一个速度,所以流线之间不能相交,也不能转折。
流管和流束:
在流场中作一封闭曲线,通过这样的封闭曲线上各点的流线所构成的管状表面称为流管。
流管内的流线群称为流束。
由流线定义,液体是不能穿过流管流进或流出的,定常流动情况下,流线形状不随时间而变,因此流管的形状及位置也不随时间而变。
截面为无限小的流束称微小流束,微小流束的极限为流线。
无数微小流束叠加起来就是运动液体的整体或称总流。
通流截面:
垂直于流束的横截面。
通流截面上各点的流速都垂直于这个面。
3.流量与平均流速
流量:
单位时间内流过某通流截面的液体体积称为流量。
对微小流束,通过其通流截面的流量为
整个通流截面A上的流量为
式中u——微小流束通流截面上的流速。
通流截面上的平均流速是假想的液体运动速度,认为通流截面上所有各点的流速均等于该速度,以此流速通过通流截面的流量,恰好等于以实际上不均匀的流速所通过的流量,因此
(1-13)
故平均流速为
(1-14)
在液压缸中,液体的流速即为平均流速,它与活塞的运动速度相同,当液压缸有效面积一定时,活塞运动速度的大小由输入液压缸的流量来决定。
二、连续性方程
连续性方程是质量守恒定律在流体力学中的表达形式。
假定液体不可压缩且作恒定流动。
如图1-8所示,取一流管,两端通流截面为A1、A2,在流管中取一微小流束,两端截面积为dA1,、dA2。
在微小截面上各点的速度可认为是相等的且分别为u1,u2。
根据质量守恒定律,在dt时间内流入液体的质量应恒等于流出液体的质量,即
因为ρ=cosnt,所以化简得u1dA1=u2dA2对于整个流管,则有
有
以通流截面Al、A2的平均速度υ1、υ2来表示则
(1-15)
由于两端截面是任意取的,所以
(1-16)
或
(1-17)
式(1-16)称为液体的流量连续性方程,它说明:
在不可压缩的恒定流动的液体中,不管平均流速和通流截面沿着流程怎样变化,流过不同截面的流量是不变的。
三、伯努利方程
1.理想液体的伯努利方程
假设液体为理想液体,并且作恒定流动。
如图1-10所示,在理想液体恒定流动中,取一假设液体为理想液体,并且作恒定流动。
如图1-10所示,在理想液体恒定流动中,取一段微小流束ab,a处断面面积为dA1,所受的压力为pl,流速为u1;b处断面面积为dA2,所受的压力为p2,流速为u2。
设时间dt内,a断面处的液体质点到达a'处,b断面上的液体质点则到达b'位置。
表面力所做的功:
根据液体的连续性原理
式中dq——流过微小流束a、b断面的流量。
重力所做的功:
动能的变化:
时间dt内,a'b段流束的液体由于各点运动参数(p、u)都没有发生变化,动能的变化应等于aa'段和bb'段两段微小流束的动能差。
即
根据力学中的动能定律,外力对液体所作的功应等于这段流束的动能的增量,于是
以液体的重量ρgdqdt除上式并整理得到微小流束的伯努利方程:
(1-18)
因为a、b断面是任意选取的,所以伯努利方程说明了在同一流束上,所有各点的数值之和为常数。
伯努利方程的物理意义:
p/ρg为单位重量液体的压力能,称为比压能;u2/2g为单位重量液体的动能,又称比动能;h为单位重量液体的位(势)能,又称比位能。
由于上述三种能量都具有长度单位,所以又分别称为压力水头、速度水头和位置水头。
公式说明,在密封管道内作恒定流动的理想液体具有三种形式的能量,即压力能、动能和位能。
它们之间可以互相转化,但是液体在管道内任一处,这三种能量的总和是一定的。
实际液体的运动中,液体将呈现出粘性即产生内摩擦力,因此将造成能量损失。
设h'w表示单位重量液体微小流束的能量损失(称阻力水头),于是可得实际液体微小流束的伯努利方程为
(1-19)
2.实际液体总流的伯努利方程
为了将微小流束的伯努利方程推广到总流,可将液体在通流截面上的流动局限于缓变流动(即微小流束或流线间的夹角及流束的曲率都非常小)的范畴,这时将微小流束扩大,由流束外层的流线所组成的流管即可认为是真实圆管。
由于实际流速u在通流截面上是个变量,若用平均流速υ来代替实际流速u,则式中的动能就要引起偏差,所以需要引入动能修正系数。
于是得到实际液体总流的伯努利方程为
(1-20)
式中hw——能量损失;
αl、α2:
——动能修正系数,一般在紊流时取α=1,层流时取α=2。
最后还要指出,在应用伯努利方程时,必须把计算断面选取在缓变流动上,但两断面间的流动并不必为缓变流动。
四、动量方程
动量方程可用来计算流动液体作用于限制其流动的固体壁面上的总作用力。
根据理论力学中的动量定理:
作用在物体上全部外力的矢量和应等于物体动量的变化率,即
在图1-12所示的管流中,任意取出被通流截面1、2所限制的液体体积,称之为控制体积,截面1、2则称为控制表面。
在控制体内任取一微小流束,该微小流束在截面1、2上的流速分别为u1、u2,设该微小流束段液体在t时刻的动量为(mu)l-2。
经Δt时间后,该段液体移动到1'-2'位置,在新位置上,微小流束段的动量为(mu)1'-2'。
因为如果液体作稳定流动,则1'-2之间液体的各点流速经Δt时间后没有变化,1'-2之间液体的动量也没有变化,故
对不可压缩的液体有
于是得出流动液体的动量方程:
(1-21)
上式表明:
作用在液体控制体积上的外力总和,等于单位时间内流出控制表面与流入控制表面的液体动量之差。
液体在流动的过程中,若其速度的大小和方向发生变化,则一定有力作用在液体上,同时,液体也以大小相等、方向相反的力作用在使其速度或方向改变的物体上。
据此,可求得流动液体对固体壁面的作用力。
第二章液压流体力学基础
第四节液体流动时的压力损失
实际液体具有粘性,在流动时就有阻力,为了克服阻力,就必然要消耗能量,这样就有能量损失。
能量损失主要表现为压力损失Δp,这也是实际液体总流的伯努利方程中最后一项hw的含义,即
压力损失过大,使功率消耗增加,油液发热,泄漏增加,效率降低,液压系统性能变坏。
液压系统中的压力损失分为两类。
一是油液流经等径直管时的压力损失,称为沿程压力损失,由液体流动时的内摩擦力引起。
另一类称为局部压力损失,是油液流经局部障碍(如弯管、管径突变、阀控制口等)时,由于液流的方向或速度突然变化,在局部区域形成旋涡、引起质点相互撞击和剧烈摩擦而产生。
一、层流、紊流、雷诺数
1883年,英国物理学家雷诺通过图1-14实验装置的实验,证实了液体存在着两种不同的流动状态——层流和紊流。
根据实验,液体是层流还是紊流,不仅与管内平均流速有关,还与管子内径和液体粘度有关。
判定液流状态的无量纲的数,叫雷诺数Re。
(1-22)
式中υ——管路中液体的平均流速;
d——圆管内径;
v——液体的运动粘度。
常用的液流管路的临界雷诺数Rec,见表1-2。
当液体的雷诺数小于其临界雷诺数即ReRec时,液流为紊流。
对于非圆形截面的管路,液流的雷诺数可按下式计算
(1-23)
R—通流截面的水力半径,是液流的有效通流截面积A与湿周长度(有效通流截面的周界长度)χ之比。
通流截面面积相等的管道,其水力半径将随着截面形状的不同而异。
水力半径对通流截面的通流能力影响很大。
水力半径大,意味着液流和管壁的接触少,摩擦阻力小,通流能力大,即使通流截面比较小时也不易堵塞;反之,水力半径小意味着通流能力小,通流截面容易堵塞。
二、沿程压力损失
沿程压力损失除了与导管长度、内径和液体的流速、粘度等有关外,还与液体的流动状态有关。
1.液流在通流截面上的速度分布规律
如图1-1
 升级会员
升级会员 