ABB机器人简单操作指南.docx
《ABB机器人简单操作指南.docx》由会员分享,可在线阅读,更多相关《ABB机器人简单操作指南.docx(13页珍藏版)》请在冰豆网上搜索。
ABB机器人简单操作指南
ABB机器人简单操作指南
1机器人主要由以下两部分组成
控制柜机械手
控制柜和机械手之间由两条电缆连接
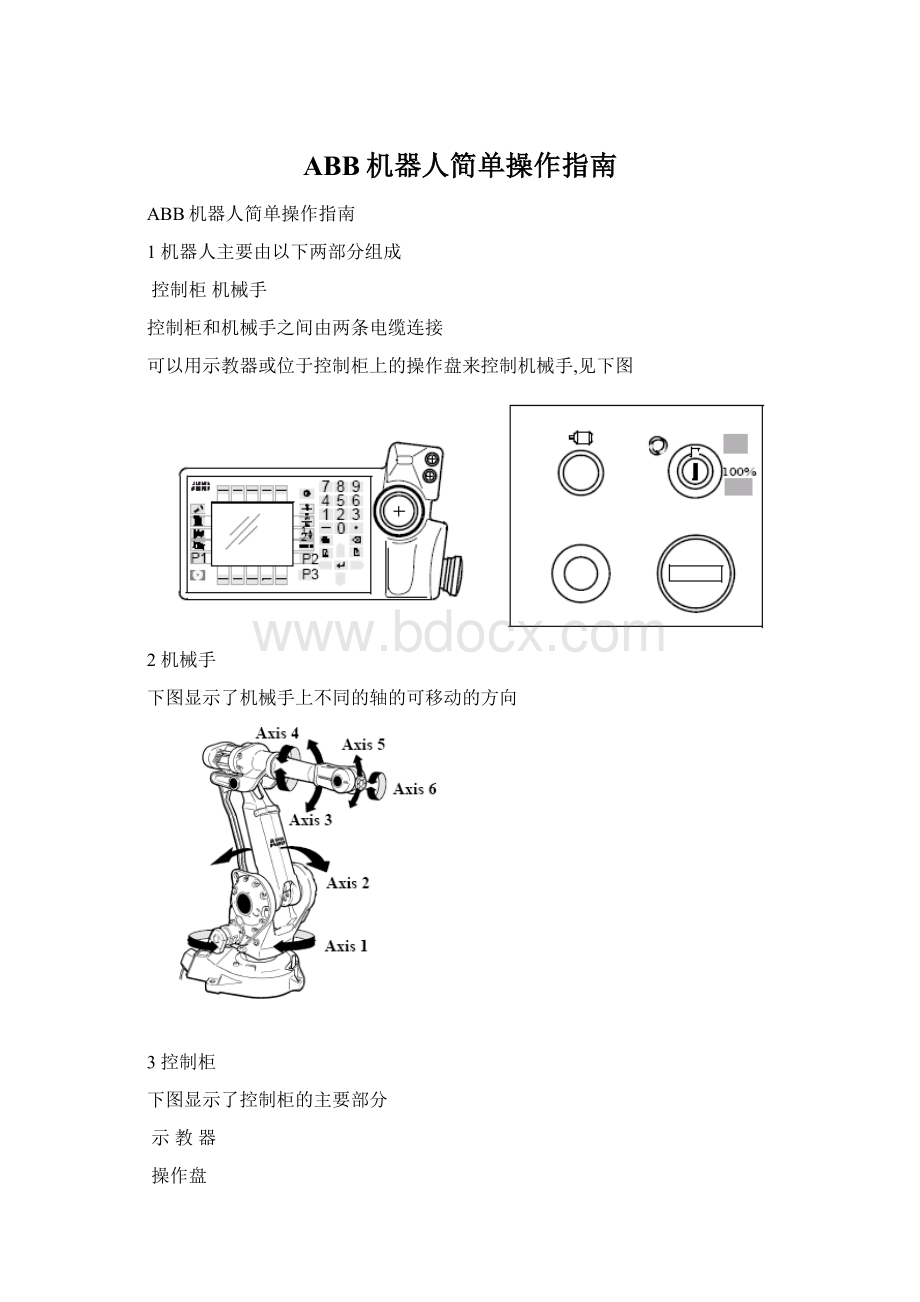
可以用示教器或位于控制柜上的操作盘来控制机械手,见下图
2机械手
下图显示了机械手上不同的轴的可移动的方向
3控制柜
下图显示了控制柜的主要部分
示教器
操作盘
主开关
驱动磁盘
4操作盘
下图描述了操作盘的功能
电机开按钮及指示灯操作模式选择开关
急停,如果按下请拉出来工作时间计数器,显示机械手的工作时间
电机开
在电机开状态,机器人的电机被激活,MotorsOn按钮保持常亮.
常亮准备执行程序
快速闪烁(4Hz)机器人没有校准或选择计数器没有更新.电机已经打开。
慢速闪烁(1Hz)一个保护停机被激活,电机关闭.
工作模式自动(生产模式)
在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人
工作模式手动减速运行(程序模式)
在机器人工作区域里面对其编程时候。
也用于在电机关状态设置机器人.
工作模式手动全速(选择,测试模式)
用来在全速情况下运行程序
急停
当按下按钮时,无论机器人处于什么状态都立即停止。
要重新启动需将按钮恢复
工作时间计数器
显示机械手工作的时间
5示教器
见下图
控制运行
使能设备
显示屏
控制杆
急停按钮
手动慢速运行:
打开手动慢速运行窗口
编程:
打开编程及测试窗口
输入/输出:
打开输入输出窗口,用来手动操作输入输出信号
其它:
打开其它窗口如系统参数,维护,生产及文件管理窗口.
停止:
停止程序执行
对比度:
调节显示屏的对比度
菜单键:
按下后显示包含各种命令的菜单
功能键:
按下后直接选择各种命令
动作单元:
按下后手动慢速运行机器人或其它机械元件
动作形式:
按下后选择怎样手动慢速运行机器人,再定位或直线
动作形式:
轴—轴移动.1=轴1-3,2=轴4-6
增加:
增加手动慢速运行开/关
列表:
按下后将指针从一个窗口移到另一个窗口(通常由双画线分开)
返回/翻页:
按下翻页或返回上级菜单
删除:
删除选中的参数
确认:
按下输入数据
上下键:
上下移动指针
左右键:
左右移动指针
编程键:
怎样定义这些键,见第10章,系统参数—示教器
5。
2窗口操作
本节讲述如何进行窗口操作,下面举例说明如何操作输入/输出窗口
按下打开输入/输出窗口
I/O窗口将被打开,如下图所示。
显示的I/O清单将会随定义的信号及I/O板的不
一样而不同
A:
菜单键
B:
窗口名称
C:
I/O列表名
D:
I/O列表
E:
功能键
F:
行数
G:
指针
当数字输出被选中后,可通过功能键改变其状态,可以通过几种方法在列表中移动
指针
移动选择
上移一行上移箭头
下移一行下移箭头
至顶行从编辑菜单至第一行
至末行从编辑菜单到最后一行
翻页下页
上页至上页
在列表中选定一个指定的行
从编辑Edit菜单跳到指定行:
键入
行号然后按OK
窗口有时候被一条双划线分开,当一个输出被选中后,将出现两个功能键
A—双划线B-功能键
有时可以在不同的窗口之间移动指针,而要在不同窗口之间移动,需按
在示教器上有四个窗口键,见下图
A-窗口键
当按下窗口键后,以前的窗口将隐藏在新激活的窗口下面,被激活的窗口状态
和上一次使用该窗口时一样。
6.1急停
急停按钮位于示教器及控制盘上,根据不同的安装,或许还有其它急停按钮。
当急停按钮被按下,电机电源马上被断掉并停止程序执行.
6.2从急停恢复
*修复造成急停的问题
*确认急停事件存储到事件日志里面
*复位急停按钮
*按下电机开按钮,从急停恢复
电机开按钮
7启动机器人
通电前,先确认没有人在机器人工作区域内
*打开主开关
机器人将进行自检,如果检查完毕并没有故障,将会在示教器上出现一条信息
在自动模式下,生产窗口将在随后几秒内出现
机器人将保持关电前的状态。
程序点仍然不变,所有的数字输出和关电前一样,
包括系统参数值.当程序重启时,被认为是一次普通的停止-启动
—机器人慢慢移回轨道(如果轨道有偏离),然后继续在轨道上运行
-动作及参数自动设定到关电前的值
—机器人将继续阻止中断
—程序开始时,关电前被激活的机械单元将自动被激活
—如果重启后修改了参数,新的参数将会被保存
限制
-所有的文件及连续通道将被关闭(可由用户程序控制)
—所有的模拟输出将被设为0,软件伺服也被设为默认值(可由用户程序控制)
-焊接向导不能重启
-独立轴不能重启
—如果在中断程序或故障处理的移动过程中出现电源故障,将不能重启轨道
7.2打开电机MOTORSON
在自动模式,按下操作盘上的MotorsOn按钮
在手动模式,按下示教器上的使能按钮enablingdevice一半,将转到MotorsOn
模式
如果使能设备按钮enablingdevice被松开然后在半秒内又被按下,机器人将不会
回到MotorsOn状态,如果发生这样情况,先松开enablingdevice,等一下再按下
一半。
8关掉机器人
关掉机器人时,所有的输出信号将为0,这将影响到夹具及外部设备
所以关机前,先检查是否有人在工作区域内
—如果程序在运行,通过按下示教器上的停止STOP按钮来停止
-然后关掉主开关mainswitch
机器人的存储器由于有后备电池,所以不会受关机的影响
9选择工作模式
通过模式选择开关选择工作模式
9.1自动模式(生产模式)
当机器人自动工作时,不能有人进入安全区域.
选择模式选择开关到
自动模式用于生产,自动运行全部程序。
在这个模式下,使能设备enablingdevice
按钮将被断开连接,编程功能也被锁住
9。
2减速手动运行(编程模式)
旋转模式开关至
如果控制运行hold-to—run被激活(通过系统参数),当松开控制运行hold—to—run
键时,将立即停止程序运行
手动减速模式用于编程或在机器人工作区域被工作.在这个模式下,外部单元
不能被遥控指挥
9.3手动全速运行(可选,测试模式)
在手动100%模式,机器人将全速移动.只有对机器人非常熟练的人才能
使用这种模式
将模式选择开关转至
控制运行hold-to—run功能被激活,也就是说当松开hold-to-run键时,程序立即停
止运行
全速手动模式只用于测试程序。
在这个模式下,外部单元不能被遥控指挥
10用控制杆手动慢速移动机器人
可以通过操作示教器上的控制杆来慢速移动机器人.本节主要讲述如何直线移
动(就是移动路线是线性的0和小步移动,这样更容易使机器人正确到达位置。
10.1直线移动
确定工作模式选择开关在手动位置,见下图
检查机器人动作单元及直线动作形式是否被选择.
动作单元
动作形式
通过Motionunit键,可以选择控制杆操作的对象,机器人或连接到控制柜上的其它单元。
下面我们选择机器人
通过Motiontype键,可以选择在手动状态下控制杆控制机器人以何种方式运动
可以选择
直线运动
特殊定位
轴—轴移动(组1:
轴1-3;组2:
轴4—6
本次练习使用直线运动
当选择直线动作形式,机器人将会像下图一样运动
Tool0点将会沿直线运动。
Tool0位于上臂前方正中处.见下图
Tool0点
按下使能设备按钮enablingdevice至一半打开电机
现在可以使用控制杆控制机器人了.
Tool0点将会沿X-,Y-,Z—轴直线运动,见下图
注意机器人移动的速度取决于操作控制杆的速度,移动控制杆越快,机器人动作
就越快
12开始运行程序
打开需要运行的程序(鉴于有权限要求,没有作翻译,请谅解),机器人首先将一步
一步地运行,然后连续运行
A—程序点
功能键展示:
开始:
连续运行程序
前移:
前移一条指令
后移:
后移一条指令
指令:
重新选择程序指令窗口
程序点(PP)所指的指令就是程序即将开始的指令。
按下一个选项,Start,FWD,
或BWD,程序开始运行
通过按下列表键选择上部的窗口
通过按-%键将速率降低至75%。
见下图。
如果增量达到5%时,将执行修正
程序现在可以启动。
但一定要确定机器人工作区域内没有人
通过按下使能设备enablingdevice及FWD按钮开始程序,见上图。
当程序开始运行时,只执行一条单独的指令,然后就停止。
按FWD开始下一条指令。
再按一次就再执行下面一条,如此类推.
从头到尾一步一步地运行程序,当机器人到位后才能按FWD.
如果按FWD到达最后一条指令后,程序将从头再运行
移动,和前面一样,移动指针至运行Running区域并改变至循环Cycle执行
将指针移回程序
通过按下Start开始程序
如果选择了Cycle,程序将执行一遍(一个循环)
再次选择连续Continuous运行
13停止程序
通过按下示教器上的停止Stop键停止程序
17故障
如果发生故障,在示教器上将出现一条信息。
如果同时发生几个故障,将会显示最
先发生的故障,见下图
所有的故障及状态改变都记录在一个日志里。
要了解更多的信息,见12章的
维护Service章节
确认故障信息
手动慢速轴—轴移动机器人
确定工作模式选择开关在手动位置,见下图
通过动作选择键选择轴-轴移动方式
轴1,2,3
轴4,5,6
轴的移动由示教器的动作决定,TCP就不会按直线移动了
 升级会员
升级会员 