激光自动跟踪课设报告材料.docx
《激光自动跟踪课设报告材料.docx》由会员分享,可在线阅读,更多相关《激光自动跟踪课设报告材料.docx(28页珍藏版)》请在冰豆网上搜索。
激光自动跟踪课设报告材料
《现代电子技术应用综合设计》课程报告
激光自动跟踪电路设计
二0一九年一月
一、综述
现今社会,光的用途越来越多样化,不论是用于照明,还是用来测绘,亦或是用在军工方面,可以说,人类正在从电的时代向光的时代转变,以前由电来解决得问题,现在可以尝试通过光电的手段来解决。
这样可以有效的提升信息的传输效率。
四象限发光物体自动追踪装置,以激光照射运动目标,根据从目标反射回来的激光信号与测量系统光轴的偏离角,控制测量系统指向目标方向的技术。
激光跟踪系统通常由激光照明器、激光探测器、信息处理系统和随动系统组成。
激光跟踪(LaserTracker)是工业测量系统中一种高精度的大尺寸测量仪器。
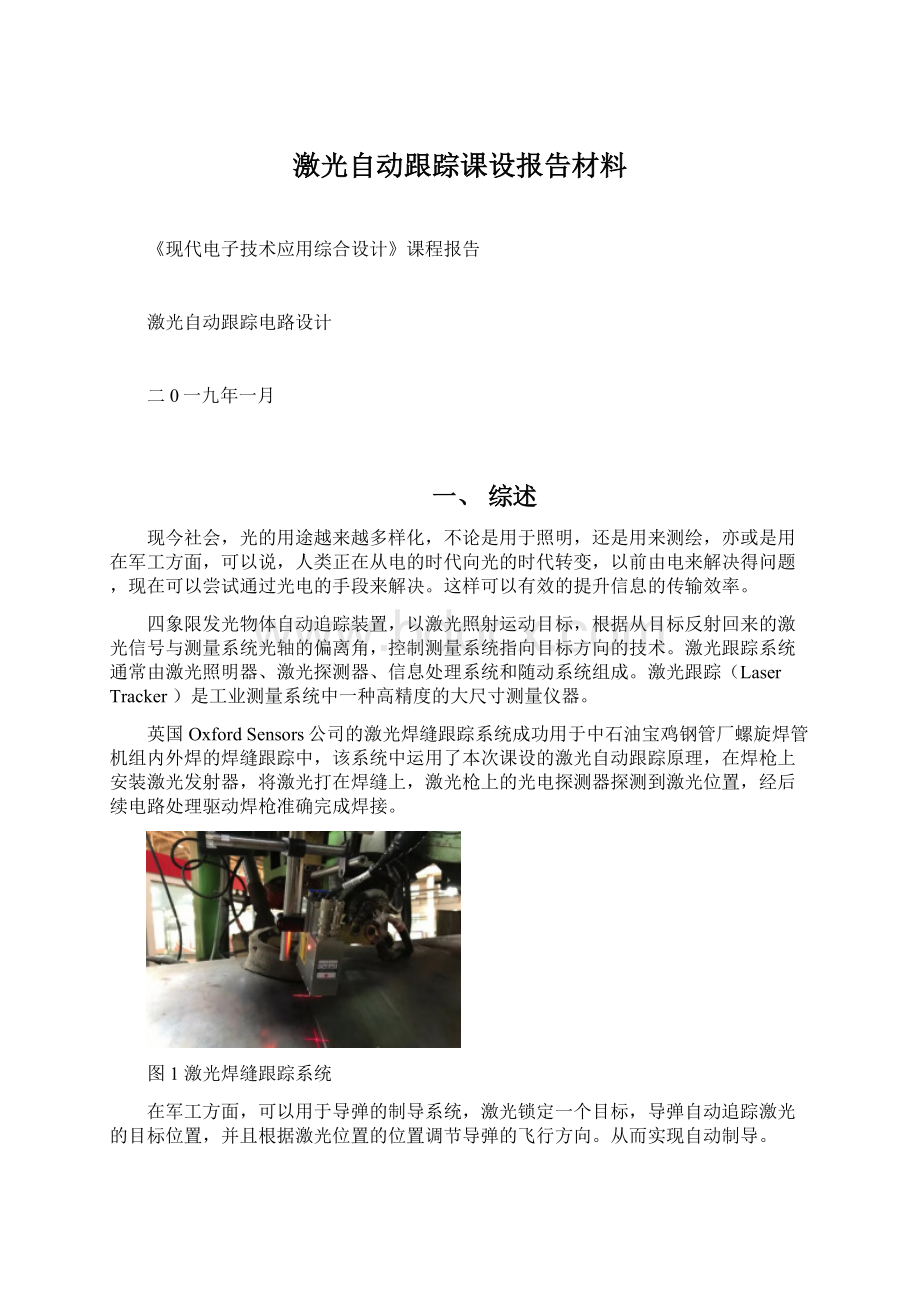
英国OxfordSensors公司的激光焊缝跟踪系统成功用于中石油宝鸡钢管厂螺旋焊管机组内外焊的焊缝跟踪中,该系统中运用了本次课设的激光自动跟踪原理,在焊枪上安装激光发射器,将激光打在焊缝上,激光枪上的光电探测器探测到激光位置,经后续电路处理驱动焊枪准确完成焊接。
图1激光焊缝跟踪系统
在军工方面,可以用于导弹的制导系统,激光锁定一个目标,导弹自动追踪激光的目标位置,并且根据激光位置的位置调节导弹的飞行方向。
从而实现自动制导。
二、系统功能及工作原理
系统功能:
本次课程设计目标是设计一套可对发光物体进行自动跟踪的系统,其可对视场内的发光物体(如太阳,LED,激光光斑)等实现自动跟踪,即始终将自身指向发光目标,此外系统应具有一定的抗干扰能力,可在室内环境正常工作。
图2四象限探测器工作流程图
工作原理:
用ICL8038发生的方波对光源进行调制,当光线照射四象限探测器时,通过四路I/U转换,将四象限探测器输出的电流转化成电压,通过乘法器组成的解调电路,将经过光源调制的信号解调成原信号和两个高频信号,然后经过滤波将高频波滤掉,得到原信号。
然后通过减法器和加法器算出(A+B-C-D)、(A+C-B-D)和(A+B+C+D),通过除法器将减法器的输出和加法器的输出相除,得到输出信号用输出信号驱动L298N,继而驱动转台。
详细设计方案:
1.调制激光:
利用ICL8038发生方波信号,并用该方波信号对激光光源进行调制。
后经由加了镜头的四象限探测器对于激光光源在纸上所产生的反射光信号进行探测,通过照在四象限探测器上的位置不同产生不同的光信号。
2.流压转换:
将探测到的微弱光信号通入由运放LM324组成的四路I/U转换电路,将微弱的电流信号转换成较大的电压信号,放大信号有利于之后对信号的处理。
3.解调滤波:
将ICL8038产生的方波信号与四路I/U转换电路的输出信号接入由乘法器AD633组成的四路解调电路,进行解调。
解调后的信号分别接入四路由运放UA741组成的滤波电路进行滤波,从而将高频的杂波进行滤除。
减少干扰。
4.信号处理:
将四路滤波后的信号分别通过由运放LM324组成的四路加法电路,之后将四路加法电路的输出信号根据四象限探测器上所产生的信号进行编号,将A+B与C+D两路的输出信号通入一个由运放UA741搭建的加法电路中,同时将A+B与C+D的输出,A+D与B+C的输出分别接入两个由运放UA741搭建的减法电路中,并按照A+B-C-D,A+D-B-C的方法接入减法电路的输入当中,最后通过由乘法器AD633和运算放大器OP07组成的除法电路,对于输入信号分别进行运算。
5.方向控制:
将除法电路的输出信号,经过非门电路,接入L298N所组成的运放电路中,从而实现对于控制方向的功能。
6.速率控制:
依据需求利用ICL8038搭建成一个输出为特定频率与幅值的三角波信号,并将两路除法电路的输出信号分别与该三角波信号在由LM399组成的两路比较电路中进行比较,并将比较后的信号接入L298N实现对于追踪速率的控制。
三、单元电路设计调试结果
1、矩形波调制电路
图3ICL8038产生方波原理图
用ICL8038产生的方波,通过三极管去调制激光光源,真正驱动激光光源的是VCC的电压值。
图4ICL8038产生方波波形图
实验现象:
产生的矩形波频率接近为2.5KHZ,产生的方波峰峰值为888mV左右。
图5被调制激光波形图
实验现象:
接激光三极管后的波形图在顶部有削弱,底部接近为0V,经过流压转换后,削顶的现象得到明显的改善。
图6调制激光电路连接图
2、I/V转换电路
图7I/V转化电路设计
由于I/V转换器的输出是电流值,要驱动后面的运算电路,需要将电流值转换为电压值,I/V的转换倍率取决于电阻R1的阻值的大小,输入电流为
,输出电压为
,所以
,因为四象限探测器的输出大小为uA量级,所以选用了1M的电阻。
图8I/V转化电路波形图
调试结果:
由四象限探测器接收到调制激光的光信号产生电流经I/U转换为如上图所示的信号。
图9I/V转化电路连接图
3、放大电路
图10放大电路电路设计
图11放大电路仿真结果
由于I/V转换产生的电压是负值而且电压值较小,所以用LM324分别将四路I/V转换电路输出信号反向放大三十倍。
图12放大电路波形
调试结果:
经放大后波形全部位于横轴以上,且峰值明显提高。
图13二级放大电路连接图
4、解调电路
图14解调电路(乘法器)
由于我们调制电路是对光源进行的调制,所以只需要解调电路进行解调就行了,解调电路的原理是在调制信号的基础上乘以一个原来的调制信号,当输入一个正弦时,乘以两次载波信号,就会形成如下公式:
(1)
可以看出原波形被单独出来了,但是有两个高频杂波信号叠加了上去,然后只需要进行滤波就可以了。
将高频杂波滤掉,得到的就是原信号。
图15四路解调电路
5、滤波电路
图16100Hz滤波电路电路设计
因为调制电压输出的是直流,所以应该将滤波器的截止频率做的尽量小就可以了,选取截止频率100Hz的二阶有源低通滤波器,截止频率公式
(2)
图17滤波器的截止频率仿真图
图18滤波器波形图
调试结果:
乘法电路输出的信号经低通滤波器后输出为直流电平。
表1滤波器A幅值随频率变化表
频率/HZ
50
55
60
65
70
75
80
85
90
幅值/V
10.2
10.3
10.1
10.0
10.1
10.0
10.2
9.2
8.4
频率/HZ
95
100
105
110
115
120
125
130
幅值/V
7.6
7.0
6.4
5.8
5.2
4.8
4.4
4.2
表2滤波器B幅值随频率变化表
频率/HZ
50
55
60
65
70
75
80
85
90
幅值/V
10.0
9.8
9.7
9.5
9.5
9.4
9.3
9.1
8.4
频率/HZ
95
100
105
110
115
120
125
130
幅值/V
8.4
6.9
6.3
6.0
5.2
5.0
4.4
4.1
表3滤波器C幅值随频率变化表
频率/HZ
50
55
60
65
70
75
80
85
90
幅值/V
10.4
10.4
10.0
9.8
9.8
9.6
9.0
8.5
8.2
频率/HZ
95
100
105
110
115
120
125
130
幅值/V
7.1
6.0
5.7
5.6
5.6
5.5
4.6
4.2
表4滤波器D幅值随频率变化表
频率/HZ
50
55
60
65
70
75
80
85
90
幅值/V
10.5
10.2
9.9
9.7
9.5
9.3
9.0
8.7
8.5
频率/HZ
95
100
105
110
115
120
125
130
幅值/V
7.8
7.3
6.3
6.4
5.5
4.4
4.3
4.2
表5滤波器的截止频率
A
B
C
D
截止频率
98
100
95
103
截止电压
7.2
7.5
7.0
7.8
图19滤波器A的幅频特性曲线
图20滤波器B的幅频特性曲线
图21滤波器C的幅频特性曲线
图22滤波器D的幅频特性曲线
图23四路滤波器电路连接图
6、减法电路
图24减法电路电路图
因为要得到四象限探测器的具体位置,所以要求左右象限感受的光强的差值,通过减法器可以有效的得到。
在搭建减法电路是要注意,输入阻抗应该相同,输入的电压值会由于输入阻抗的比值而产生正比关系,而且电压值是由光强影响的,所以即使光照在同样的坐标,四象限做的差值也会发生变化,和光强成正比,而为了避免光强对确定点的坐标发生影响,从而引入加法器和除法器。
表6减法器输出峰峰值
(A+D)-(B+C)
(A+B)-(C+D)
最低
-514mV
-603mV
最高
736mV
693mV
图25减法电路连接图
7、加法电路
图26加法电路电路图
加法电路要注意,两路输入信号的输入阻抗要相等,因为输入电压会受输入阻抗的影响而导致输入电压值改变。
表7加法器输出最值
A+B
C+D
A+D
B+C
A+B+C+D
Vmin
230mV
130mV
201mV
121mV
364mV
Vmax
892mV
727mV
886mV
745mV
1140mV
图27加法电路连接图
8、除法电路
图28AD633组成的除法电路
图29除法电路仿真
图30除法电路输出最小值
图31除法电路输出最大值
实验现象:
得到电压最大值6.23V,电压最小值-7.97V。
图32两路除法电路连接图
9、绝对值电路
由于除法电路输出值为正负值,不能直接控制电机正反转,且在PWM中需要与三角波进行比较,故增加绝对值电路。
图33绝对值仿真电路
图34三路绝对值连接电路
10、非门电路
图35非门电路
采用74LS14非门芯片发现当输入的负电压小于-3V后,经过非门不能输出高电平,通过查找资料发现采用传统的三极管搭建的非门电路效果比74LS14的效果好。
图36三极管搭建的两非门电路
11、三角波电路
利用三角波进行PWM调制,直接用ICL8038产生三角波,再接入绝对值电路将其横轴下半部分翻转到上边。
图37ICL8038产生三角波电路原理
图38ICL8038产生三角波波形图
图39三角波经绝对值电路产生波形
图40ICL8038产生三角波连接电路
12、比较电路
将产生的三角波与除法电路后的绝对值电路进行比较产生PWM,比较电路如下图所示
图41比较电路仿真
图42PWM波形(窄)
图43PWM波形(宽)
图44PWM产生电路连接
13、L298N电路
图45L298N电机驱动电路
四、整体电路搭建图
图46整体电路连接图
五、整体电路功能
本次课程发光物自动跟踪整体电路设计和搭建均已完成,整体电路可以做到如下功能:
1.通过探测视场内发光物体的位置,驱动电机跟踪发光物体;
2.系统具有一定的抗环境光干扰能力;
3.通过改进最终跟踪目标距离在105cm左右;
存在的缺陷与不足:
开始设计的是四路跟踪探测,但最终只有一维达到了课程设计目标,另外一维主要问题表现在探测距离在50cm左右,且在无光环境时能自行转动,当调节其分压大小使其能在无光环境下静止时,发现其探测距离也减小。
六、小组课程设计总结
本次课设,我主要在其中负责小组成员的任务分配,统筹协调,调试小组成员所搭建的电路,遇到问题时召集小组成员进行讨论,找到解决方法,例如在非门电路中,想到了在电工电子课程中学到的三极管搭建非门的方法,取代了原来借的芯片,并实际调试出较好的性能。
在解决探测距离不足时,想到了提高二级的放大倍数,并通过改变绝对值电路后的分压值,使电机的转速合适。
我在本次课程设计中负责搭建了方波调制电路、I/V转换电路、解调电路、减法电路、绝对值电路。
本次课设我受益匪浅,从同学那里学到了很多只有通过动手实践才能学到的东西。
跟之前的自己比,在连线上比以前熟练了许多,领悟到了布局合理的重要性,知道了自学的重要性,学会了看芯片的datasheet。
几位同学都比我会的多、懂得多,我非常愧疚自己没能帮上大忙,只能做一些简单的事。
我明白了自己想要的是什么,也明白了自己该做什么。
我在本次课设中,主要进行数据记录并填写学习进度计划表,并对一部分电路进行了调试,整体电路出现问题,进行逐步排查解决问题。
遇到了一些问题,首先是电路连线出错,这就需要耐心和认真的态度去做好课设,还要就是整体电路不能正常工作时,要进行分步电路检查,通过示波器对应的波形来判断部分电路是否正常。
这次课设带给我的感受,知道了一些基本电路的原理知识,明白了激光自动跟踪系统的流程,一个复杂的系统是由一个一个的单元部分构成的,部分电路的功能实现和效能,决定了总体电路成功与否和其能到达的性能高低,而且要敢于尝试不同的方法去实现同一个目标,并进行比较选择最适的方法解决问题。
本人在此次课设中主要负责滤波电路,放大电路和三角波电路的搭建,结题报告的编写。
本次课设,收获颇深,感触良多,从方波产生到PWM功率调制,学会设计许多电路。
在搭建放大电路时我曾遇到直流分量无法消去的问题,于是我把原本的放大电路改进为交流放大电路,解决了这个问题。
虽然后续又因为产生了波形相位移动的问题无法解决又改回了原方案,但发现问题解决问题分析问题的过程的经验是宝贵的。
我在此次课设中主要负责答辩及ppt的制作、加减法和除法电路及固定配件的搭建和所有焊接部分。
在此次课设中相比于之前现代电子课程中学到的,此次课设中我则是更加针对于PWM的使用有更大的进步。
并且学到用三角波比较来控制电机速度等等。
并且在电路调试的过程中更加理解了整个电路搭建的原理,因为每次出错误必定是局部出现问题,导致整体出错,所以要依次排错。
从而使得电路原理更加熟记于心。
并且通过各种方法排除错误,拓宽了思维,使其不局限于书本。
并且学到了很多宝贵的电路搭建和电路设计经验。
七、实际用到器件
表8实际用到器件
序号
电路名称
名称
数量
名称
数量
1
方波调制电路
ICL8050
1
激光照射灯
1
2
I/U转换电路
LM324
1
四象限探测器
1
3
解调电路
AD633
4
4
滤波电路
UA741
4
5
减法电路
UA741
2
6
加法电路
UA741
5
7
除法电路
AD633
2
OP07
2
8
绝对值电路
UA741
6
9
非门电路
8050三极管
2
10
比较电路
LM339
1
11
电机电路
12V直流电机
2
L298N
1
 升级会员
升级会员 