S7300讲稿第8章.docx
《S7300讲稿第8章.docx》由会员分享,可在线阅读,更多相关《S7300讲稿第8章.docx(13页珍藏版)》请在冰豆网上搜索。
S7300讲稿第8章
第8章S7-300/400在模拟量闭环控制中的应用
8.1闭环控制与PID控制器
8.1.1模拟量闭环控制系统
1.模拟量闭环控制系统的组成
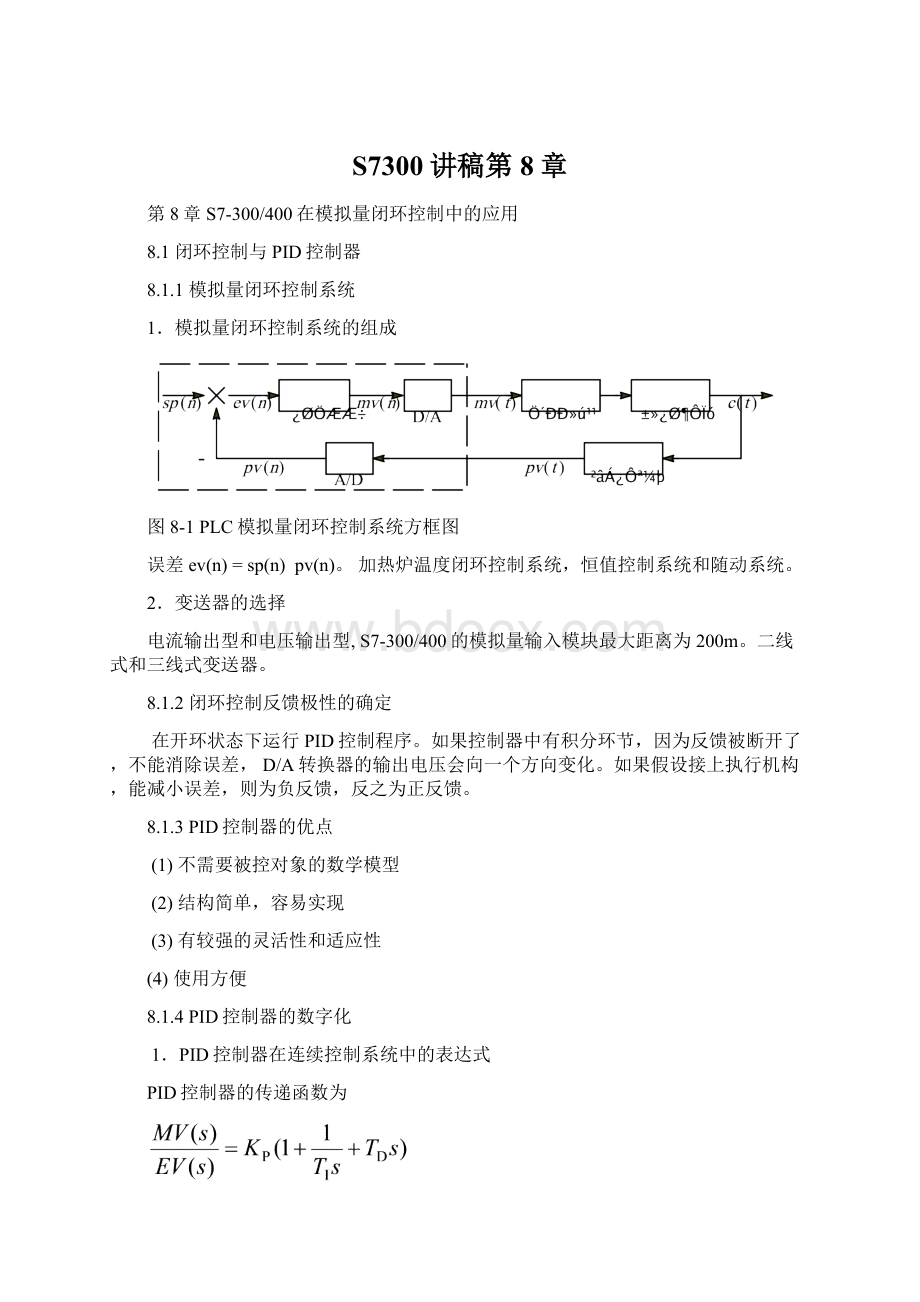
图8-1PLC模拟量闭环控制系统方框图
误差ev(n)=sp(n)pv(n)。
加热炉温度闭环控制系统,恒值控制系统和随动系统。
2.变送器的选择
电流输出型和电压输出型,S7-300/400的模拟量输入模块最大距离为200m。
二线式和三线式变送器。
8.1.2闭环控制反馈极性的确定
在开环状态下运行PID控制程序。
如果控制器中有积分环节,因为反馈被断开了,不能消除误差,D/A转换器的输出电压会向一个方向变化。
如果假设接上执行机构,能减小误差,则为负反馈,反之为正反馈。
8.1.3PID控制器的优点
(1)不需要被控对象的数学模型
(2)结构简单,容易实现
(3)有较强的灵活性和适应性
(4)使用方便
8.1.4PID控制器的数字化
1.PID控制器在连续控制系统中的表达式
PID控制器的传递函数为
模拟量PID控制器的输出表达式为
(8-1)
需要较好的动态品质和较高的稳态精度时,可以选用PI;控制对象的惯性滞后较大时,应选择PID控制方式。
2.积分部分的近似计算
简写为
,输出量
简写为
。
各块矩形的总面积为
。
3.微分部分的近似计算
将积分和微分的近似表达式代入式(8-1)
(8-2)
上式可以以化简为
(8-3)
式中的KI=KP
/TI,KD=KPTD/
,分别是积分系数和微分系数。
4.不完全微分PID
对应于微分操作的延迟时间TM_LAG。
不完全微分PID的传递函数为
5.死区特性在PID控制中的应用
8.1.5使用系统功能块实现闭环控制
本章主要介绍用于CPU31xC的PID控制的系统功能块SFB41~SFB43。
1.SFB41~SFB43的调用
计算频率越高,单位时间的计算量越多,能使用的控制器的数量就越少。
2.PID控制的程序结构
应在OB100和在循环中断OB35中调用SFB41~43。
执行OB35的时间间隔(ms)即PID控制的采样周期
。
8.2连续PID控制器SFB41
SFB“CONT_C”可以作为单独的PID恒值控制器,或在多闭环控制中实现级联控制器、混合控制器和比例控制器。
SFB41可以用脉冲发生器SFB43进行扩展,产生脉冲宽度调制的输出信号,来控制比例执行机构的二级或三级(twoorthreestep)控制器。
8.2.1设定值与过程变量的处理
PV_R=PV_PER×100/27648
PV_NORM的输出=PV_R×PV_FAC+PV_OFF
8.2.2PID控制算法
引入扰动量DISV(disturbance)可以实现前馈控制。
SFB“CONT_C”有一个初始化程序,在输入参数COM_RST(完全重新起动)设置为1时该程序被执行。
在初始化过程中,如果I_ITL_ON(积分作用初始化)为1状态,将输入I_ITLVAL作为积分器的初始值。
INT_HOLD为1时积分操作保持,积分输出被冻结。
8.2.3控制器输出值的处理
在手动模式时如果令微分项为0,将积分部分(INT)设置为LMN–LMN_P–DISV,可以保证手动到自动的无扰切换,即切换时控制器的输出值不会突变,DISV为扰动输入变量。
LMN=LMN_LIM×LMN_FAC+LMN_OFF
LMN_PER=LMN×27648/100
8.3步进PI控制器SFB42
8.3.1步进控制器的结构
SFB42“CONT_S”(步进控制器)用开关量输出信号控制积分型执行机构,电动调节阀用伺服电机的正转和反转来控制阀门的打开和关闭,基于PI控制算法。
SFB42的初始化程序在输入参数COM_RST为1时执行。
图中的三级(Threestep)元件具有带滞环的双向继电器非线性特性。
图8-6有位置反馈信号的步进控制系统
图8-7中用模拟的阀门位置信号来代替实际的阀门位置反馈信号。
参数MTR_TM是执行机构从一个限位位置移动到另一个限位位置所需的时间。
图8-7使用模拟的位置反馈信号的步进控制系统
积分器对图8-7中A点处的信号±100.0/MTR_TM积分的分量可以用来模拟阀门开度(位置)的变化情况。
三级元件的输入信号中有3个分量:
(1)ER*GAIN,为PI控制器中的比例分量;
(2)ER*GAIN/TI经积分器积分后的信号,为PI控制器中的积分分量;
(3)A点的信号积分后,得到的模拟的阀门开度(位置)信号。
1.对设定值、过程变量和误差的处理与SFB41的完全相同。
2.PI步进算法与脉冲的生成
脉冲发生器PULSEOUT保证最小脉冲时间PULSE_TM和最小断开时间BREAK_TM,以减小执行机构的磨损。
3.手动模式
手动与自动的切换过程是平滑的。
4.控制阀的极限位置保护
8.4脉冲发生器SFB43
8.4.1脉冲发生器的功能与结构
SFB43“PULSEGEN”(脉冲发生器)与连续控制器“CONT_C”一起使用,构建脉冲宽度调制的二级(twostep)或三级(threestep)PID控制器。
图8-9PLC模拟量闭环控制系统方框图
脉冲列的该恒定周期(PER_TM)等于PID控制器的采样周期CYCLE。
假设脉冲周期PER_TM是SFB43处理周期CYCLE的N倍(见图8-10),建议N≥20。
控制值的精度为(100/N)%。
每个周期输出的脉冲宽度与输入变量INV成正比,设N=20,如果输入变量为最大值的30%,则前6次调用(20次调用的30%)SFB43时正脉冲输出QPOS为1状态。
其余14次调用(10次调用的70%)时输出QPOS为0状态。
2.自动同步
如果输入INV发生了变化,并且对SFB43的调用不在输出脉冲的第1个或最后两个调用周期中,将进行同步。
脉冲宽度被重新计算,并在下一个周期开始输出一个新的脉冲。
图8-11PULSEGEN框图
3.运行模式的参数设置
可以组态为三级输出、双极性二级输出或单极性二级输出。
表8-3运行模式的参数设置
操作模式
MAN_ON
STEP3_ON
ST2BI_ON
三级控制
FALSE
TRUE
Any
双极性二级控制,控制范围
-100%~100%
FALSE
FALSE
TRUE
单极性二级控制,控制范围
0%~100%
FALSE
FALSE
FALSE
手动模式
TRUE
Any
Any
4.二级控制或三级控制中的手动模式
表8-4手动模式的输出信号
POS_P_ON
NEG_P_ON
QPOS_P
QNEG_P
三级控制
FALSE
FALSE
FALSE
FALSE
TRUE
FALSE
TRUE
FALSE
FALSE
TRUE
FALSE
TRUE
TRUE
TRUE
FALSE
FALSE
二级控制
FALSE
Any
FALSE
TRUE
TRUE
Any
TRUE
FALSE
5.初始化
SFB“PULSGEN”的初始化程序在输入参数COM_RST为1时运行。
8.4.2三级控制器
表8-5三级温度控制输出信号的状态
输出信号
加热
执行机构关闭
冷却
QPOS_P
TRUE
FALSE
FALSE
QNEG_P
FALSE
FALSE
TRUE
图8-12三级控制器的对称曲线
比率系数用于改变正脉冲宽度和负脉冲宽度之比。
例如在热处理中,用于补偿电加热和水冷却的不同时间常数,取值范围为0.1~10.0,比率系数通常为1。
图8-12为比率系数为1的三级控制器的对称曲线。
将单位为%的输入变量INV与周期时间PER_TM相乘,可以计算出正、负脉冲宽度:
脉冲宽度=INV×PER_TM/100(8-5)
2.最小脉冲/最小中断时间
防止因短促的接通/断开时间降低开关元件和执行机构的使用寿命。
8.4.3二级控制器
二级(two-step)控制只用PULSEGEN的正脉冲输出QPOS_P控制I/O执行机构。
图8-13-100%~100%的双极性控制值二级控制图8-140%~100%的单极性控制值二级控制
如果在控制闭环中二级控制器的执行脉冲需要逻辑状态相反的开关量信号,可以用QNEG_P输出负的输出信号。
表8-6两个输出量的二级控制
脉冲
执行机构打开
执行机构关闭
QPOS_P
TRUE
FALSE
QNEG_P
FALSE
TRUE
8.5PID控制器的参数整定方法
8.5.1PID控制器的参数与系统动静态性能的关系
比例作用:
与e(k)在时间上一致,调节及时。
KP↑→ess↓,精度↑;σ%↑,稳定性↓;tr↓,上升加快。
Ⅰ型系统对阶跃输入无差,恒值控制时KP可调小些。
积分作用:
只要误差不为零,u(k)就会变化,直到误差为0,可以消除阶跃响应的稳态误差。
90度滞后相角,不利于稳定性,很少单独使用。
TI↑,→积分作用↓,σ%↓,消除误差的速度减慢。
微分作用:
e不大,但de/dt可能较大,微分作用反映变化的趋势,提前给出较大的调节作用,较比例调节更为及时,提前预报。
Td↑,→σ%↓,抑制高频干扰的能力↓。
Td过大,在输出接近稳态值时上升缓慢。
选取采样周期TS时,应使它远远小于系统阶跃响应的纯滞后时间或上升时间。
表8-7采样周期的经验数据
被控制量
流量
压力
温度
液位
成分
采样周期(s)
1~5
3~10
15~20
6~8
15~20
8.5.2确定PID控制器参数初值的工程方法
扩充响应曲线法:
(1)断开系统的反馈,令PID控制器为KP=1的比例控制器,在系统输入端加一个阶跃给定信号,测量并画出广义被控对象(包括执行机构)的开环阶跃响应曲线。
(2)在曲线上最大斜率处作切线,求得被控对象的纯滞后时间τ和上升时间常数T1。
(3)求出系统的控制度。
控制度=
(4)根据求出的τ,T1和控制度的值,查表8-8,求得PID控制器的KP,TI,TD和TS,采样周期TS也可以参考表8-7选取。
表8-8扩充响应曲线法参数整定表
控制度
控制方式
KP
TI
TD
TS
1.05
PI
PID
0.84T1/
1.15T1/
3.4
2.0
-
0.45
0.1
0.05
1.2
PI
PID
0.78T1/
1.0T1/
3.6
1.9
-
0.55
0.2
0.16
1.5
PI
PID
0.68T1/
0.85T1/
3.9
1.62
-
0.65
0.5
0.34
2.0
PI
PID
0.57T1/
0.6T1/
4.2
1.5
-
0.82
0.8
0.6
 升级会员
升级会员 