洗瓶机设计11.docx
《洗瓶机设计11.docx》由会员分享,可在线阅读,更多相关《洗瓶机设计11.docx(13页珍藏版)》请在冰豆网上搜索。
洗瓶机设计11
目录
1题目及设计要求……………………………………………2
1.1工作原理及工艺动作过程…………………………2
1.2原始数据及设计要求………………………………2
1.3设计方案提示………………………………………3
2设计任务………………………………………………………3
3工作循环图……………………………………………………3
4机构系统简图…………………………………………………4
5传动系统设计…………………………………………4
5.1设计说明………………………………………………4
5.2参数设计………………………………………………4
5.3设计简图………………………………………………5
6推瓶机构设计…………………………………………………5
6.1构件的设计简图………………………………………5
6.2杆组拆分方法:
………………………………………6
6.3虚参与实参的对照表…………………………………6
6.4运动过程分析…………………………………………7
7设计方案及结果的评价……………………………………10
8收获与建议…………………………………………………10
9参考文献……………………………………………………………………10
一、设计题目及要求
1.1工作原理及工艺动作过程
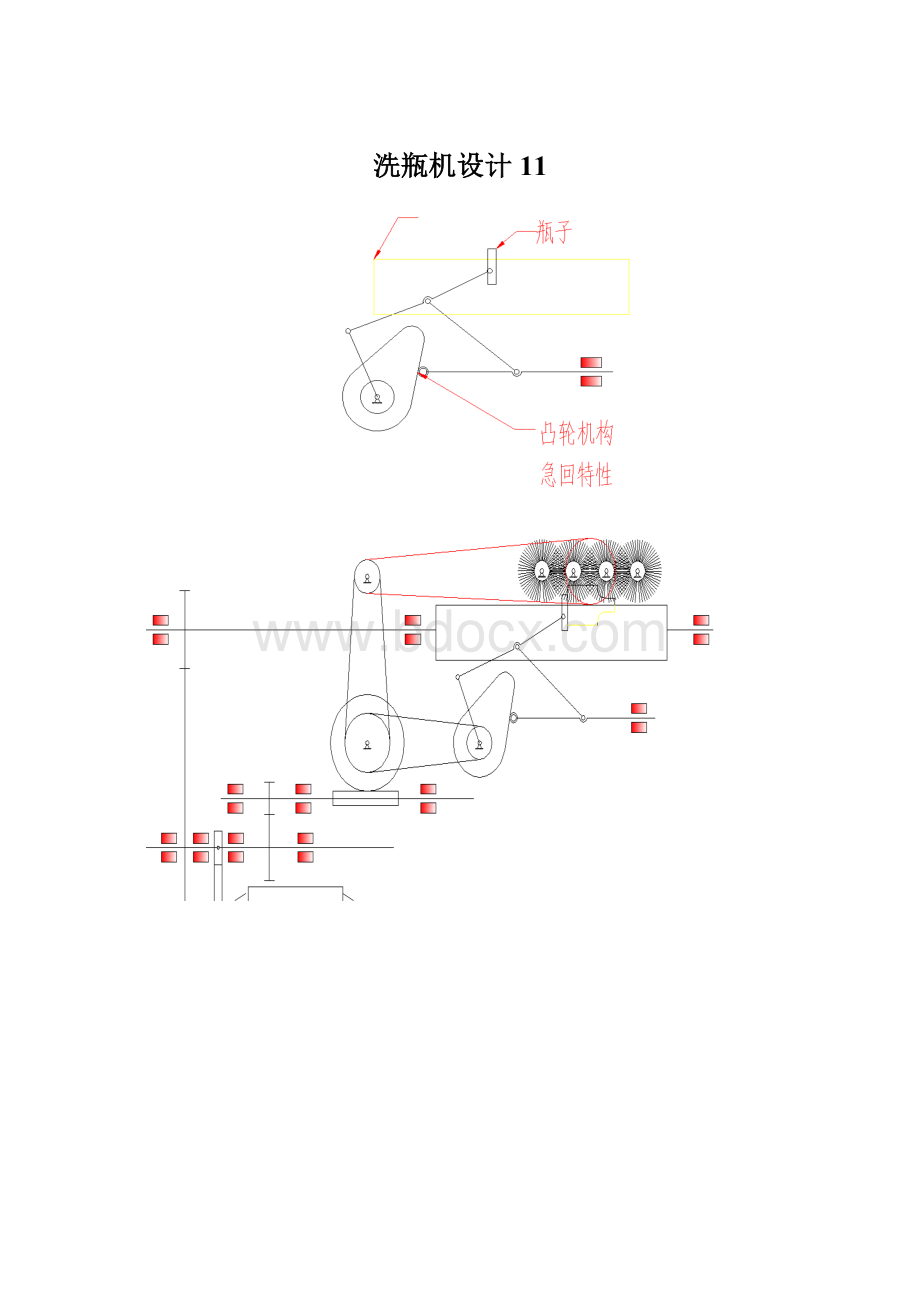
为清洗圆形瓶子的外面,把待洗的瓶子放在两个转动着的导辊上,导辊带动瓶子旋转。
当推头M把瓶推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送入导辊。
它的主要动作:
将到位的瓶子沿着导辊推动,瓶子推动过程中利用导辊转动将瓶子旋转以及将刷子转动。
图1是洗瓶机有关部件的工作情况示意图。
图1洗瓶机有关部件的位置示意图
1.2原始数据及设计要求
设计推瓶机构时的原始数据和要求为
(1)
图2推头M的可走轨迹之一
瓶子尺寸:
大端直径d=80mm,长200mm。
(2)推进距离l=600mm。
推瓶机构应使推头M以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环。
(3)按生产率的要求,推程平均速度为v=45mm/s,返回时的平均速度为工作行程的3倍。
(4)机构传动性能良好,结构紧凑,制造方便。
(5)刷子转速180r/min,电动机转速1430r/min,导辊转速20r/min,导辊直径120mm。
1.3设计方案提示
(1)推瓶机构要求推头作近似直线轨迹,回程时轨迹形状不限,但不能反向拨动下一个瓶子,可以如图2所示。
由上述运动要求,常用基本机构是不容易实现,可以采用组合机构来实现。
(2)洗瓶机构由一对同向转动的导辊和三只转动的刷子组成,可以通过机械传动系统来完成。
二、设计任务
(1)根据工艺动作顺序和协调要求拟定运动循环图;
(2)进行推瓶机构的选型,以实现洗瓶动作要求;
(3)根据选定的原动机和执行机构的运动参数拟定机械传动方案,分配传动比,并在图纸上画出传动方案图;
(4)机械运动方案的评定和选择;
(5)对执行机构进行运动尺寸计算;
(6)对执行机构进行运动分析,画出运动线图,进行运动模拟;
(7)画出机械运动方案简图;
(8)编写设计计算说明书。
三、工作循环图
工作循环图如图3.1
推头
推程
回程
下一循环
刷子
转动
停止
下一循环
导辊
转动
停止
下一循环
图3.1
四、机构系统简图
图4.1
五、传动系统设计
5.1设计说明:
(如图5.1)电机转动,经由一蜗杆带动蜗轮1,蜗轮1进过传动齿轮2带动刷子1转动,最后经由传动齿轮4、6带动刷子2、3。
(如图5.2)该图为图5.1的俯视图,蜗轮1、平面齿轮10、锥齿轮11三个齿轮共轴,蜗轮1带动三个刷子。
齿轮10经由传递齿轮9链接到齿轮8,同轴圆盘8’为推瓶机构(如图6.1)主动件。
锥齿轮11带动锥齿轮12,同轴齿轮12’带动导辊2转动,导辊1、2之间用一个传递齿轮14连接。
特别说明:
平面齿轮1和锥齿轮11为不完全齿轮,有齿和无齿的范围比例为13:
5.
5.2参数设计:
i1617=2:
1i17’1=18:
1i12=2:
1i23=2:
1i34=1:
2
i45=2:
1i56=1:
2i67=2:
1i109=5:
1i98=3:
1
i1112=1:
1i12’13=2:
1i1314=1:
1i1415=1:
1
齿轮齿数:
z16=20z17=40z17’=2z1=36z2=72z3=144
z2=72z5=144z6=72z7=72z10=20z9=100z8=300z11=40z12=40z12’=30z13=60z14=60
z15=60
5.3设计简图
图5.1
图5.2
六、推瓶机构设计
6.1构件的设计简图
设计说明:
如图6.1主动件为一个圆盘(现用
杆来代替),主动件连一个RPR杆组,
其中构件
(图6.3)为一U形杆(
避免推、回程时与刷子相撞)。
图6.1
参数设计:
构件①(图6.2)长度l1=0.1m,lAC=0.21m,l2=0.83m
6.2杆组拆分方法:
1.由以上机构的结构分析可知,本机构可分解为主动件单杆(图6.2),
、
构件组成的RPR杆组(图6.3)。
6.3虚参与实参的对照表
1)对主动件
进行运动分析,调用bark函数,求B点的运动参数。
如下表:
形式参数
n1
n2
n3
k
r1
r2
gam
t
w
e
p
vp
ap
实值
1
2
0
1
r12
0.0
0.0
t
w
e
p
vp
ap
2)调用rprk函数求
、
构件的位置角、角速度、角加速度。
形式参数
m
n1
n2
k1
k2
r1
r2
vr2
ar2
t
w
e
p
vp
ap
实值
1
2
3
2
3
0.0
&r2
&vr2
&ar2
t
w
e
p
vp
ap
3)调用bark函数求4点的运动参数。
形式参数
n1
n2
n3
k
r1
r2
gam
t
w
e
p
vp
ap
实值
2
0
4
2
0.0
r24
0.0
t
w
e
p
vp
ap
6.4运动过程分析
6.4.1说明:
根据表中数据,调用函数,进行编程,求得4点的速度与加速度值。
6.4.2主程序清单:
#include"stdio.h"
#include"graphics.h"
#include"subk.c"
#include"draw.c"
main()
{
staticdoublep[20][2],vp[20][2],ap[20][2],del;
staticdoublet[4],w[4],e[4];
staticdoublepdraw[370],vpdraw[370],apdraw[370];
staticintic;
doubler12,r24;
doublepi,dr;
doubler2,vr2,ar2;
inti;
FILE*fp;
r12=0.1;r24=0.83;
w[1]=0.27488;e[1]=0.0;del=10.0;
p[1][1]=0.0;
p[1][2]=0.0;
p[3][1]=0.0;
p[3][2]=-0.21;
pi=4.0*atan(1.0);
dr=pi/180.0;
printf("\nTheKinematicParametersofPoint4\n");
printf("NoTHETA1S4V4A4\n");
printf("degmm/sm/s/s\n");
if((fp=fopen("file1","w"))==NULL)
{
printf("Can'topenthisfile./n");
exit(0);
}
fprintf(fp,"\nTheKinematicParametersofPoint4\n");
fprintf(fp,"NoTHETA1S4V4A4\n");
fprintf(fp,"degmm/sm/s/s\n");
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(i)*del*dr-30*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rprk(1,2,3,2,3,0.0,&r2,&vr2,&ar2,t,w,e,p,vp,ap);
bark(2,0,4,2,0.0,r24,0.0,t,w,e,p,vp,ap);
printf("\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,p[4][1],vp[4][1],ap[4][1]);
fprintf(fp,"\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,p[4][1],vp[4][1],ap[4][1]);
pdraw[i]=p[4][1];
vpdraw[i]=vp[4][1];
apdraw[i]=ap[4][1];
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw1(del,pdraw,vpdraw,apdraw,ic);
}
6.4.3运行结果(图6.4)与图象(图6.5):
TheKinematicParametersofPoint4
NoTHETA1S4V4A4
degmm/sm/s/s
1-30.000-0.3080.0110.025
2-20.000-0.2970.0240.017
3-10.000-0.2790.0320.011
40.000-0.2570.0380.007
510.000-0.2310.0420.005
620.000-0.2040.0440.003
730.000-0.1760.0450.001
840.000-0.1470.0460.001
950.000-0.1170.0460.000
1060.000-0.0880.046-0.000
1170.000-0.0590.046-0.000
1280.000-0.0290.046-0.000
1390.0000.0000.0460.000
14100.0000.0290.0460.000
15110.0000.0590.0460.000
16120.0000.0880.0460.000
17130.0000.1170.046-0.000
18140.0000.1470.046-0.001
19150.0000.1760.045-0.001
20160.0000.2040.044-0.003
21170.0000.2310.042-0.005
22180.0000.2570.038-0.007
23190.0000.2790.032-0.011
24200.0000.2970.024-0.017
25210.0000.3080.011-0.025
26220.0000.310-0.008-0.036
27230.0000.296-0.036-0.051
28240.0000.262-0.074-0.067
29250.0000.200-0.120-0.074
30260.0000.110-0.162-0.053
31270.0000.000-0.180-0.000
32280.000-0.110-0.1620.053
33290.000-0.200-0.1200.074
34300.000-0.262-0.0740.067
35310.000-0.296-0.0360.051
36320.000-0.310-0.0080.036
37330.000-0.3080.0110.025
(图6.4)
(图6.5)
七、设计方案及结果的评价
该机构的传动比为2.6,推头推程的平均速度为45mm/s,速度波动不大,基本符合要求,且推程近乎直线,推头机构设计简单,合理。
传动系统为间歇机构,节省能源,大多采用齿轮机构,传动比精度高。
但也有不足之处:
某些尺寸搭配不太合理,有些齿轮间传动比也不太合理。
因为是第一次设计,所以对设计的一些常识还不是很了解,但我相信我会在今后设计的路上逐渐丰满自己的羽翼!
八、收获与建议
收获:
经过这次亲身体验机械原理课程设计我明白了很多东西。
首先,机械设计并不是一件简单的工作,在一定要求下设计一种机构也不是想象中的那么容易。
其次,使我正视了机械设计工作者应该具备的严谨的态度。
再次,使我树立了信心,要努力学好机械各专业。
建议:
对第一次搞设计的同学提供更多的帮助,最好能以某一设计为课本,给同学们全面讲解该怎样入手,该以如何步骤来进行机械设计。
九、参考文献
1王淑仁主编.机械原理课程设计.北京:
科学出版社,2006
2孙志礼,黄秋波,闫孙涛,马星国主编.机械设计.北京:
科学出版社,2008
3李树军主编.机械原理.沈阳:
东北大学出版社,2006
 升级会员
升级会员 