汽车焊装生产线装备夹检具设计制造.docx
《汽车焊装生产线装备夹检具设计制造.docx》由会员分享,可在线阅读,更多相关《汽车焊装生产线装备夹检具设计制造.docx(51页珍藏版)》请在冰豆网上搜索。
汽车焊装生产线装备夹检具设计制造
1、焊装夹具基本构造
1.1、焊装夹具的用途(图1-1)
焊装夹具在车身生产中的作用是:
通过夹具上的定位销(基准销)、S面型块(基准面)、夹紧臂等组件的协调作用,将工件(冲压件或总成件)安装到工艺设定的位置上并夹紧,不让工件活动位移,保证车身焊接精度的一致性和稳定性。
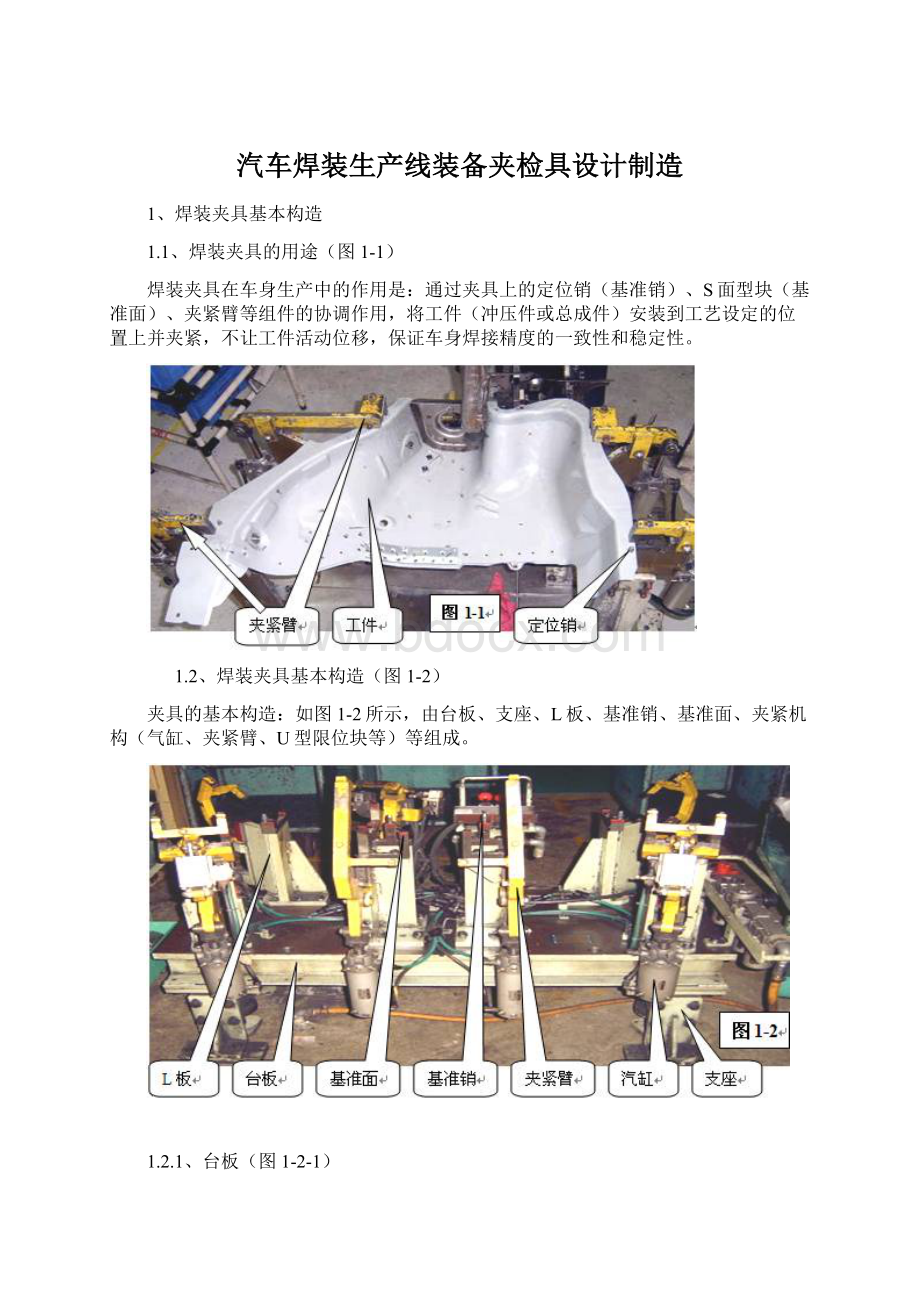
1.2、焊装夹具基本构造(图1-2)
夹具的基本构造:
如图1-2所示,由台板、支座、L板、基准销、基准面、夹紧机构(气缸、夹紧臂、U型限位块等)等组成。
1.2.1、台板(图1-2-1)
a、用途
用于安装夹具组件,上表面加工有坐标刻度线,用于夹具基准状况的检测(如:
三座标检测仪检测用)。
b、安装要求
台面应处于水平状态(工艺设计要求倾斜放置的除外),安装时用测量仪、水平仪或透明胶管灌水检查校水平。
多台连线安装的夹具(特别是采用举升自动搬送的装置),同轴度和水平度、节距应符合设计要求。
c、使用保养
保持台面清洁、无焊渣、油污、灰尘附着、无分流烧伤或撞击凸凹痕迹,座标刻度线清晰完整,严禁在台面上敲击作业。
1.2.2、支座(图1-2-2)
a、用途
用于支撑夹具台板、夹具高度调节和安放水平调整,使夹具按工艺布置要求定置安放。
b、安装要求
连接螺栓紧固可靠,调节螺杆应有垫板支撑,夹具定置调整符合要求后,要将调节螺杆螺母拧紧,若是大型夹具或连线夹具垫板应和基础预埋件可靠连接(焊接)。
c、使用保养
定期检查拧紧连接螺栓和螺杆锁紧螺母,定期检查调整台板的水平度。
1.2.3、L板(图1-2-3)
a、用途
用于安装夹具型块(S面元件)、基准销组件、夹紧机构、导向装置等夹具组件。
b、安装要求
采用高强螺栓与台板连接,并配定位销定位,同夹具组件的连接也应采用高强螺栓连接,并配定位销定位。
c、使用保养
定期检查拧紧连接螺栓(最好用记号笔做标记),定期检查定位销有否松动或脱落。
1.2.4、基准面(S面型块图1-2-4)
a、用途
将零件支承在正确的位置上,并支撑夹具夹紧机构的夹紧力。
b、安装要求
基准面型块采用高强螺栓安装在L板(或连接板)上,并用定位销定位,表面应经过调质处理,硬度在HRC48以上,一般会在基准面端部约10mm宽的部位涂红色标记,基准面应与数模相符(用三坐标仪测量)。
c、使用保养
定期检查拧紧连接螺栓(最好用记号笔做标记),定期检查定位销有否松动或脱落;保持表面清洁,无分流烧伤、碰伤痕迹、无焊渣赃物附着(见图1-2-5);夹紧状况下和工件间的间隙<0.1mm(用塞尺检查 见图1-2-6)。
(注:
S面上若有焊渣和灰尘附着,零件则不能接触到S面,不能安装到正确位置)
1.2.5、基准销(图1-2-7)
a、用途
将零件安装到正确的位置上;保持后续工序定位基准的一致性;保证产品焊接精度的一致性和稳定性。
b、安装要求
定位销一般分为固定式和活动式两类。
固定式安装时一般用陷钉锁紧,让其不能活动;活动销作业时能往复伸缩,以方便工件装卸,一般采用气缸(气动)或手推夹(手动)作动力,安装时径向摆动量应<0.2mm;销的工作段和导向段的表面硬度和粗糙度,应分别在HRC52和0.16以上,活动销导向孔应配有石墨铜衬套,以减少销的磨损和方便维修保养。
c、使用保养
①基准销表面,无分流烧伤痕迹、无焊渣赃物附着。
②活动销导向部分应润滑良好。
③对定位销的磨损状况、装配状况进行日常点检和定期检查(如图1-2-8所示:
装上工件,在夹持机构没有夹的状态下,用手板动一下工件,如能活动,应进一步检查确认以下项目)。
Ⅰ、检查固定销紧固状况(图1-2-9):
用手从销的径向和轴向搬动,若能活动(能用手转动或拔出),则不行。
Ⅱ、检查基准销工作段磨损状况(图1-2-10):
(磨损极限:
组焊工位:
销径磨损0.2mm、单面0.1mm、增打工位:
销径磨损0.5mm、单面0.25mm)。
若超过上述极限,应及时更换新销。
Ⅲ、检查活动式基准销导向段磨损状况(图1-2-11):
活动销在工作(伸出)状态下,关闭气源,从径向两个方向上推动销子,用游标卡尺测量摆动量,极限值应<0.2mm,否则,应进一步检查销和衬套的磨损状况,将超差者更换。
Ⅳ、检查定位销的有效长度(图1-2-12),用钢板尺从安装好的工件上表面测量,销伸出工件表面的直径部分必须在3-5mm之间,超过该范围应进行调整或更换新销。
1-2.6、夹紧机构(图1-2-13)
a、用途
夹紧机构(U型块、夹紧臂、汽缸或手夹、等)-用于矫正变形的工件、缩小工件间的搭接间隙,将工件夹紧固定在正确的位置上(基准面),避免焊接作业时工件错位或变形,确保工件焊接精度的稳定性。
①、U型限位块(图1-2-14):
使夹具夹紧臂(或带有基准销和S面的摆臂)处于夹紧工况时的稳定性(不让其摆动),确保定位或夹紧部位的准确性。
②、夹紧臂:
通过杠杆或四连杆的作用,将气缸(或手夹)的推力转化为夹紧臂(或摆臂)的夹紧力,实现“矫正变形的工件、缩小工件间的搭接间隙,将工件夹紧固定在正确的位置上(基准面),避免焊接作业时工件错位。
”的目标。
③、气缸(或手夹):
通过气缸(或手夹)的往复运动,实现夹具的夹紧和松开。
b、安装要求
U型限位块付(凸凹组件)的安装,U型槽侧面和安装部位侧面间隙<0.05mm,用高强内六角螺栓可靠紧固,凸凹组件啮合时不能产生碰撞(不能有异响),止动面间隙<0.1mm,用手推动夹紧臂(或摆臂)凸凹组件不能有错动;夹紧臂(或摆臂)应有足够的强度,夹紧状况下不能产生弯曲变形;气缸(或手夹)的夹紧力(气压、节流阀、缓冲阀或调节螺栓)应调整合适,夹具动作应柔和,没有明显异响,工件夹紧部位不能产生明显压痕或变形;夹紧工况下工件用手不能搬动,夹紧臂用手不能晃动。
注:
U型限位块付配合间隙用塞尺(厚薄规)检查。
c、使用保养
①、U型限位块(一般都涂有红色标记)凸凹组件应紧固可靠无松动,止动面上无焊渣灰尘附着;夹紧状况下,用手推动夹紧臂(或摆臂)凸凹组件不能相对错动(如有错动现象,必须进一步检查(用塞尺)止动面间的配合间隙,若间隙≥0.1mm,应作更换处理。
)。
②、作业过程中,要尽量避免焊枪(或工件)和夹具产生碰撞,以免造成夹臂变形;避免焊枪直接接触夹具组件,以免产生分流烧伤夹具组件;夹头表面不能有焊渣附着;夹紧臂各部位的连接螺栓应紧固可靠,铰链活动销部位应润滑良好;日常点检应对夹紧臂的夹紧状况进行检查(图1-2-15),夹紧状况下,用手从上下、左右方向搬动夹臂),如有松动的现象,应进一步检查夹紧机构的其他组件的状况,以确保夹具工作的可靠性。
③、气缸杆上的锁紧螺母不能有松动的现象、气缸不能有漏气、窜气现象,否则会产生夹不紧或夹不到位的现象;气缸上的节流阀、缓冲阀锁紧螺母应紧固可靠。
手夹容易疲劳松动,影响夹紧状况,日常点检中随时进行相应的调整,保持手夹操作时手感有“死点”顶紧的感觉,夹紧状况下,工件手搬无松动,夹紧臂不能用手晃动的现象。
2、气动夹具基本气动系统(图2-1)
2.1、常通气路
常通气路(压缩气源系统):
一般由压缩气源、开关(截止阀)、气动三联体(气源处理装置)、分路器等组成。
作用:
给气动装置(夹具)供给干净、压力合适、带有润滑油雾的压缩空气。
2.1.1、空气压缩机
作用:
将电机或内燃机的机械能转化为压缩空气的压力能。
a、单级活塞式压缩机(图2-1-1)
工作原理:
图2-1-1所示,当活塞从上死点向下死点移动,活塞上腔容积逐步增大,缸内压力小于大气压,空气便从进气阀门吸入气缸内,直到在冲程下死点,活塞在曲轴的带动下向上运动,进气阀关闭,活塞上腔容积逐步减小,空气被压缩,同时出气阀被打开,压缩空气进入储气罐。
这种只由一组活塞气缸的一个往复冲程就将大气压空气吸入并压缩到所需要的压力的压缩机,叫单级活塞式压缩机,通常用于需要0.3~0.7MPa压力范围的系统。
b、两级活塞式压缩机(图2-1-2)
在单级压缩机中,若空气压力超过0.6MPa,产生的过热将大大地降低压缩机的效率。
因此,工业中使用的活塞式压缩机通常是两级的。
如图2-1-2所示,压缩机由两组活塞气缸组成,第一级气缸要比第二级气缸大,工作时第一级活塞首先将吸入气缸的大气空气压缩到一定压力后,经过中间冷却器冷却后再进入第二级气缸进行二次压缩,使气压进一步增大,同时出气阀被打开,压缩空气进入储气罐。
这种压缩机相对于单级压缩机,可以提供更大压力的压缩空气,同时经过冷却器的作用压缩机的的输出温度得到控制,提高了机械效率。
如果最终压力为0.7MPa,第一级通常将它压缩到若0.3MPa,然后被冷却,再输送到第二级气缸中压缩到0.7MPa,最后输出的温度可能在120℃左右。
2.1.2、气源开关(截止阀)
图2-1-3 二位三通截止阀结构图:
1-开关总成(开位)、2-开关总成(关位)、3-阀体、4-操作手轮、5-弹簧压杆、6-弹簧座、7-弹簧、8-阀门总成、9-排气阀座。
a、作用
切断或开通气动装置(夹具)的压缩气源。
b、工作原理
图2-1-3所示,当操作手轮处于1位置时,通过压杆5和弹簧座6压缩弹簧7,使阀门总成8克服其弹簧张力向下移动打开进气口,同时将排气口关闭,压缩空气进入夹具气动系统,使夹具处于工作状态。
当操作手轮处于2位置时,压杆5和弹簧座6加在弹簧7的压力消除,阀门总成8在其弹簧张力的作用下复位上移将进气口关闭,同时将排气口打开,进入夹具气动系统的压缩气源被切断,夹具气动机构的残气被排空,使夹具处于卸荷状态。
c、安装使用
开关安装时,必须注意阀体上的箭头方向应和气流方向一致,不能反装,并且应装在气动三联体的前面。
生产过程中开关处于常开状态(图2-1-3手轮在1位);日常检查保养时(清除焊渣、清扫灰尘、加油润滑、更换易损件:
如铜极板等,一切需要操作者将手伸进夹具的作业。
),作业前必须先切断(图2-1-3手轮在2位)压缩气源,并排空余气(对于二位二通开关要反复操作按钮或手柄开关),直至夹具没有动作为止,作业完毕后,要将夹具上的工具及一切杂物清理干净,确认一起作业的人员已离开夹具后,方可重新接通气源,进行生产作业。
2.1.3、气动三联体(图2-1-4)
图2-1-4所示:
气动三联体-由空气过滤器、减压阀、油雾器组成,作用是将气源压缩空气进行过滤、减压、油雾后供给气路元件。
a、空气过滤器 (图2-1-5)
Ⅰ、作用
大气中所有的空气都混有粉尘和水分,被压缩之后,水分在后冷却器和储气罐中被冷凝,但是还总有一些混在空气中。
除此以外,碳化了的油的细粒子,管子的锈斑,以及其它杂质,如密封件磨耗了的材料,呈胶状的物质,所有这些物质都会致使气动组件受害,增加橡胶密封件和零件的磨损使密封件产生膨胀和腐蚀,从而阀被卡住。
过滤器的作用就是尽可能接近在使用点前去除这些杂质,使空气得以比较清洁。
Ⅱ、工作原理
压缩空气从过滤器输入口进入后,通过导流板引起空气急速旋转。
污物、水和油的较重的粒子向外抛到过滤器杯子的内壁,然后回转下降落到底部沉积,而微粒灰尘和雾状水汽则由滤芯滤除,为阻止分离出来的液体重新回到空气流中,在滤芯下部设有阻挡板,使打旋空气下方产生一个静态区域;杯中积存的液体通过手动排水阀排放。
Ⅲ、使用保养
日常点检要检查杯底,有没有液体和沉淀物(粉尘)积存,随时排放滤杯中的积存物,滤芯因阻塞会造成压力下降,在需要更换前要定期拆洗滤芯,保持杯体内外透明清晰(注:
拆洗滤杯时必须关闭压缩气源)。
b、压力调节阀(减压阀图2-1-6)
Ⅰ、作用
气动夹具的工作气压是在夹具设计时就设定好的,减压阀的作用就是将气源的压力调节(减低)至和设定压力相符,确保夹具稳定可靠的工作。
若压力大于设定值时,会增加气动元件和夹具的磨损,甚至使夹臂疲劳变形、工件被夹变形等;若压力小于设定值时会造成夹具夹紧力不足,造成夹具动作缓慢,效率低下,甚至出现夹不紧、夹不到位的现象,造成焊接飞溅增大和车身精度不稳定等问题。
Ⅱ、工作原理
图2-1-6为膜片式减压阀的结构图,当顺时针旋转手轮时调压弹簧将阀门打开,让气流从初始压力P1输入口到二次压力P2的输出口,同时通过阻尼孔使输出压力作用于膜片上,当回路连接输出口到达设定压力,则内里的空气作用于膜片上而产生一提升力相对于弹簧力。
如果流量下降,P2就稍微增加,也增加了作用在膜片上相对于弹簧力的力,膜片和阀随即提升,同时膜片的提升使溢流座打开,超量的压力可通过减压阀体的盖上孔排出,直到与弹簧力再次平衡,空气流量通过阀将会减少,直到它的消耗量和输出压力保持平衡为止。
如果流量增加,P2就稍微减小,这个减小使作用在膜片上的力相对弹簧力减少,膜片和阀下降,直到再次与弹簧力相平衡一致。
这样增加的空气流量通过阀直到它的消耗量和输出压力保持平衡为止。
夹具气路所使用的多属于溢流减压阀,工作过程中会从溢流孔排出少量气体,所以不能用于有害工作介质的气路中,没有空气消耗时,阀是关闭的。
压力表指示的压力为输出P2的压力。
Ⅲ、使用保养
夹具气路工作压力不能随意调节,减压阀调节手轮应处于锁紧状态;气压表应灵敏准确。
c、油雾器(图2-1-7)
Ⅰ、作用
将油杯里的润滑油按一定的计量要求给气路供油,并使之形成油雾后,随着压缩空气的流动到各气动元件,在机械运动表面形成油膜,达到润滑作用。
Ⅱ、工作原理
图2-1-7所示,当压缩空气进入(A),分为两个通道。
空气大部分越过阻尼叶片从输出口输出,同时也经过一个单向阀进入油杯上腔。
当没有流量时(没有消耗空气),存在于杯内油的表面、油管和视油器内压力相同,当然不会产生油的移动。
当空气流量通过油雾器时,由于阻尼叶片限制,导致输入与输出间压力降,流量越大压力降越大。
因为视油器由毛细管连接到阻尼叶片之后的低压区域(喉管原理),视油器内的压力比杯内低,这个压力不同的差压使油从管内上升,通过单向阀和油量调节阀后进入视油器,一旦油进入视油器,油通过毛细管渗入到在最高气流(喉管原理)的地方,油滴被高速气流打碎雾化后均匀地与空气混合,并随气流由出口输出,送入气动系统。
阻尼叶片是由柔性材料制成,当流量增加时可弯曲使流过通路增宽,自动地调节压力降和保持恒定的油雾混合;空气单向阀使不切断气源的情况下,也可以进行加油。
Ⅲ、使用保养
油雾器必须使用专用的气体润滑油(艾志机械652EN);出油量必须调整合适,出油太多不但会造成浪费,还会污染环境,出油量太少会造成润滑不良,损害设备,一般要求汽缸动作30±5缸次出一滴油;定期清洁保养,保持杯体内外清洁透明,刻度清晰,没有油垢附着,及时加油补充,确保杯内油量在下刻度线之上。
2.1.4、分路器
作用是将主气路分成多条支路,使气动系统各个回路能平衡工作。
因结构简单这里不作介绍。
2.2、控制气路(图2-2)
控制气路(气路控制系统):
一般由手操作阀、行程阀或行程感应器、换向阀(有手动、气控、电磁换向等)组成,作用:
通过方向控制阀开放,关闭或切换阀内部机构的连接来确定气口间的气流,按夹具的工作程序给工作气路(执行机构)分配压缩空气,使夹具按设定的工作程序协调、准确的工作。
2.2.1、手动操作阀(开关)
Ⅰ、作用
手动操作阀通常是在机械操作阀上附加一个适用手动操作的头部而实现的(如:
操作手柄和操作按钮)。
手动操作阀是单稳态的阀(弹簧复位),多采用二位二通截止阀(无排气手柄操作)或二位三通截止阀(有排气按钮操作,如:
图2-2-1所示)。
一般用于启动、停止和别的操作气动控制装置的地方。
Ⅱ、工作原理(图2-2-1)
图2-2-1所示为按钮式3/2操作阀(截止阀),当按钮处在非操作位置(a)时,在复位弹簧力的作用下,阀门处在关闭状态,输入通道和输出通道被阀门阻断,输出通道处于排气卸荷状态,输出端压缩空气通过阀杆的排气口排出。
当按钮处在操作位置(b)时,在外力的作用下,阀门克复弹簧的作用力向下移动,将阀门打开,同时将排气口关闭,气流从输入口P流向输出口A.气动装置进入工作状态。
松开按钮,在复位弹簧力的做用下阀恢复(a)状态,等待下各工作循环。
Ⅲ、使用保养
按钮应操作灵活,复位干脆彻底,没有漏其现象。
2.2.2、行程阀(机械操作阀图2-2-2)
Ⅰ、作用
在自动化机器中,机械操作阀的作用是给气动装置控制系统发送运动机械的行程(位置)信号或给换向阀供给控制气源,实现工作循环的自动控制(如图2-2-2所示)。
Ⅱ、工作原理
行程阀的结构和手操作阀是一样的,所不同的是由手动的按钮变成机械操作的滚轮杠杆(或滚轮柱塞),当机械运动的行程使凸轮压到行程阀的滚轮杠杆时(图2-2-3所示),阀门被打开,同时
将排气口关闭,气流从输入口P流向输
出口A(图2-2-1所示),给气动装置
控制系统发送运动机械的行程(位置)
信号或给换向阀供给控制气源。
当机械
运动的行程使凸轮离开行程阀的滚轮杠
杆时阀门关闭,同时将排气口打开排气。
这样反复循环,从而实现机械运动的自
动控制。
Ⅲ、使用保养
行程阀及凸轮的安装螺栓必须紧固可靠,不能有松动的现象;凸轮行程压合滚轮杠杆时必须使阀门完全打开又不致于压的太过,脱离时必须完全彻底,不能半脱半离,阀杆复位必须灵敏到位。
2.2.3、换向阀(图2-2-4)
Ⅰ、作用
换向阀按控制方式的不同(图2-2-4所示),分为手动换向阀、气动换向阀、电磁换向阀、先导式电磁阀(电-气换向阀)等。
其作用是改变气流通道,使气体流动方向发生变化。
从而改变气动执行元件(如:
气缸)的运动方向。
Ⅱ、工作原理(以气动换向阀为例)
气动换向阀是利用气体压力来使主阀阀芯(滑柱)轴向运动,从而使气体改变流向的一种控制阀。
图2-2-5是二位五通气动换向阀结构图,当控制气路给气控口“PB”输入一个压力气流(一般为短的压力脉冲),滑柱向右移动,输入口“P”和输出口“B”接通,执行机构(气缸)“B”腔给气,同时“P”“A”通道被关闭,“A”腔和排气口“EA”接通排气,阀会保持在这操作位置上直到相对的控制气路给气控口“PA”输入一个压力气流(短的压力脉冲),滑柱向左移动,输入口“P”和输出口“A”接通,气流实现换向,执行机构(气缸)“A”腔给气,同时“P”“B”通道关闭,“B”腔和排气口“EB”接通排气,完成一个工作循环。
Ⅲ、使用保养
因为滑柱和阀套的摩擦力较小,为避免滑柱自动滑动,阀必须水平安装;为保证滑柱滑动灵活、换向可靠,压缩空气必须清洁和带有充分的润滑油雾;停止操作的工况下,排气口不能有漏气、窜气的现象。
注:
电磁换向阀是利用电磁力来使主阀阀芯(滑柱)轴向运动,实现气流换向的(适用于小流量气动回路)。
而先导式电磁换向阀是利用电磁力来控制先导阀,先导阀打开后的气体压力使主阀阀芯(滑柱)轴向运动,实现换向(适用于大流量气动回路和自动化控制系统)。
手动换向阀是利用人力操作手柄来使主阀阀芯(滑柱)轴向运动,实现换向(适用于自动化程度不高的气动装置)。
2.3、工作气路(执行机构图2-3)
工作气路(执行机构):
一般由气缸、节流阀等组成,作用是将压缩空气的压力能转变为机械能的元件,它驱动夹具相关机构作直线运动、摆动或回转运动,并输出力和力矩。
使夹具按照设定的速度对工件的定位、夹紧、松开等功能。
2.3.1、气缸(图2-3-1)
Ⅰ、作用
气缸按其用途或结构的不同,有单作用气缸、双作用气缸、摆旋转气缸等,作用都是将压缩空气的压力能转变为机械能的元件,它驱动相关机构作直线运动、摆动或回转运动,并输出力和力矩。
Ⅱ、工作原理(双作用气缸)
图2-3-1所示是一个带气缓冲的双作用气缸结构图,当压缩气流从进气口“A”进入气缸左腔时(此时在换向阀的作用下,进气口“B”处于排气状态),活塞在气压的作用下,带动活塞杆回缩,夹紧臂进行打开行程(图2-3所示),当活塞到达行程末端,缓冲套插入缓冲密封区时,主排气通道被封闭,空气只能通过缓冲通道经调节阀排出,使活塞降速,夹紧臂的打开速度变得缓慢,直到打开行程结束。
在控制气路的作用下,当压缩气流变向从进气口“B”进入气缸右腔时(此时在换向阀的作用下,进气口“A”处于排气状态),活塞在气压的作用下,带动活塞杆伸出,夹紧臂转为夹紧行程(图2-3所示),当活塞到达行程末端,缓冲套插入缓冲密封区时,活塞进入缓冲行程,夹紧臂的夹紧速度变得柔和,避免速度过快产生冲击力而损害工件和夹具,直至夹紧行程结束。
气缸完成一个工作循环。
这种缓冲气缸两端部都装有主排气节流阀和缓冲排气节流阀,分别和主排气通道和缓冲排气通道连接,通过可调节主排气节流阀可以改变活塞的运动速度(这种阀对进气也有节流作用),通过可调节缓冲排气节流阀可以改变活塞进入缓冲行程的运动速度。
Ⅲ、使用保养
作业过程中,要避免焊枪(或工件)和气缸及附件产生碰撞和发生接触分流现象;气缸不能有漏气、窜气现象,否则会产生夹不紧或夹不到位的现象;气缸上的节流阀、缓冲阀锁紧螺母应紧固可靠;压缩空气必须清洁和带有充分的润滑油雾,确保气缸润滑良好。
2.3.2、节流阀(图2-3-2)
Ⅰ、作用
图2-3-2所示是工作气路上常用的不同结构的节流阀,都是通过调节开度来控制气动回路中压缩空气的流量(一般多控制排气流量),从而调节汽缸活塞的运动速度,使夹具相关机构的机械动作变得柔和、准确、协调。
Ⅱ、工作原理(图2-3-3)
图2-3-3所示,是一个节流阀的结构图,一个阀体内有一个单向阀和一个可变节流阀,a图中,空气自由地流向气缸,在b图中,气流经过有节流阀的通道流向排气口。
如(C)图所示,当压缩空气从“A”向“B”流动过程中,一个通道被阀内的单向阀堵死,气流只能经过调节阀节流后流向“B”,因此,通过调整节流阀来改变排气流量,从而改变活塞的运动速度;当压缩空气从“B”向“A”时,气流可以畅通无阻的通过单向阀通道流向“A”,只有少量经过节流阀,因此。
气流进入气缸时,没有受到节流阀的影响。
Ⅲ、使用保养
节流阀安装调试合适后要将锁紧螺母拧紧,日常点检要作拧紧检查,必要时要重新调整,要避免焊枪(或工件)和阀体发生碰撞。
3、其他
3.1、活动轴、导轨机构
对夹具上的活动轴(或铰链销)、导轨等滑动机构,要及时清理油污及附着物,使表面无焊渣附着,没有碰伤、划伤、烧伤凸痕,要定期检查加油,使润滑油清新干净;配合间隙符合要求(在机构夹紧U型限位块闭合的状态下,用手摇晃相关机构,晃动量应小于规定标准。
3.2、夹具状况定检
按照《工装管理规定》,夹具使用者应能配合专业人员,按《夹具定期检查表》的要求对夹具进行定期检查,并提供夹具使用情况的相关信息。
附:
《夹具定期检查表》
4、常用气动回路介绍
气动的基本回路实质是阀的组合,其作用是完成一定功能。
现在已有了一定数量的能完成基本功能的气动回路,即使最复杂的气动回路也能由这些基本回路组成。
4.1、流量放大回路(图4-1)
大气缸需要大的空气流量,
为避免手动操作大流量的换向
阀,如图4-1所示(图①为小流
量的3/2手动操作阀,图②为气
控大流量的5/2换向阀)用较小
的手操作阀操纵大流量的气控换
向阀。
这种功能通常就叫做“流
量放大”。
它通常用于远距离控制:
大流量阀接近气缸,而小流量阀
设置在便于操作的控制板上。
4.2、信号切换回路(图4-2)
用流量放大回路的原理来切
换操作阀的功能从常通到常闭或
相反
 升级会员
升级会员 