惯性导航原理的理解.docx
《惯性导航原理的理解.docx》由会员分享,可在线阅读,更多相关《惯性导航原理的理解.docx(17页珍藏版)》请在冰豆网上搜索。
惯性导航原理的理解
Part1.Accelerometer
Tounderstandthisunitwe'llstartwiththeaccelerometer.Whenthinkingaboutaccelerometersitisoftenusefultoimageaboxinshapeofacubewithaballinsideit.Youmayimaginesomethingelselikeacookieoradonut,butI'llimagineaball:
了解本单元,我们从加速度计开始。
当考虑加速度计通常想象成一个立方体形状的盒子里面有一个球很有助于理解。
你也可以想像别的像饼干或者一个甜甜圈,但我会想象一个球:
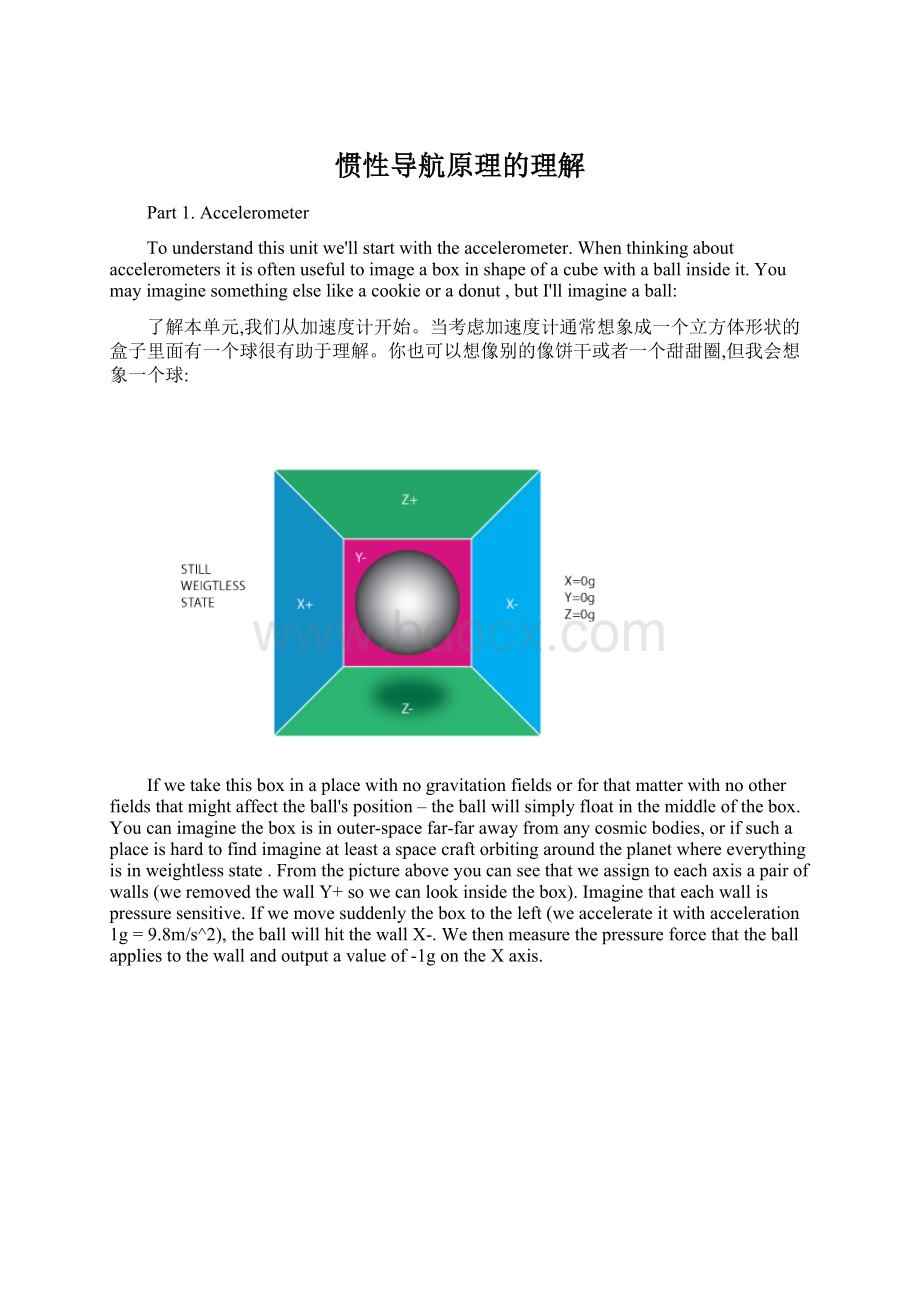
Ifwetakethisboxinaplacewithnogravitationfieldsorforthatmatterwithnootherfieldsthatmightaffecttheball'sposition–theballwillsimplyfloatinthemiddleofthebox.Youcanimaginetheboxisinouter-spacefar-farawayfromanycosmicbodies,orifsuchaplaceishardtofindimagineatleastaspacecraftorbitingaroundtheplanetwhereeverythingisinweightlessstate.Fromthepictureaboveyoucanseethatweassigntoeachaxisapairofwalls(weremovedthewallY+sowecanlookinsidethebox).Imaginethateachwallispressuresensitive.Ifwemovesuddenlytheboxtotheleft(weaccelerateitwithacceleration1g=9.8m/s^2),theballwillhitthewallX-.Wethenmeasurethepressureforcethattheballappliestothewallandoutputavalueof-1gontheXaxis.
Pleasenotethattheaccelerometerwillactuallydetectaforcethatisdirectedintheoppositedirectionfromtheaccelerationvector.Thisforceisoftencalled InertialForceorFictitiousForce .Onethingyoushouldlearnfromthisisthatanaccelerometermeasuresaccelerationindirectlythroughaforcethatisappliedtooneofit'swalls(accordingtoourmodel,itmightbeaspringorsomethingelseinreallifeaccelerometers).Thisforcecanbecausedbytheacceleration,butaswe'llseeinthenextexampleitisnotalwayscausedbyacceleration.
IfwetakeourmodelandputitonEarththeballwillfallontheZ-wallandwillapplyaforceof1gonthebottomwall,asshowninthepicturebelow:
Inthiscasetheboxisn'tmovingbutwestillgetareadingof-1gontheZaxis.Thepressurethattheballhasappliedonthewallwascausedbyagravitationforce.Intheoryitcouldbeadifferenttypeofforce–forexample,ifyouimaginethatourballismetallic,placingamagnetnexttotheboxcouldmovetheballsoithitsanotherwall.Thiswassaidjusttoprovethatinessenceaccelerometermeasuresforcenotacceleration.Itjusthappensthataccelerationcausesaninertialforcethatiscapturedbytheforcedetectionmechanismoftheaccelerometer.
WhilethismodelisnotexactlyhowaMEMSsensorisconstructeditisoftenusefulinsolvingaccelerometerrelatedproblems.Thereareactuallysimilarsensorsthathavemetallicballsinside,theyarecalledtiltswitches,howevertheyaremoreprimitiveandusuallytheycanonlytellifthedeviceisinclinedwithinsomerangeornot,nottheextentofinclination.
Sofarwehaveanalyzedtheaccelerometeroutputonasingleaxisandthisisallyou'llgetwithasingleaxisaccelerometers.Therealvalueoftriaxialaccelerometerscomesfromthefactthattheycandetectinertialforcesonallthreeaxes.Let'sgobacktoourboxmodel,andlet'srotatethebox45degreestotheright.Theballwilltouch2wallsnow:
Z-andX-asshowninthepicturebelow:
Thevaluesof0.71arenotarbitrary,theyareactuallyanapproximationforSQRT(1/2).Thiswillbecomemoreclearasweintroduceournextmodelfortheaccelerometer.
Inthepreviousmodelwehavefixedthegravitationforceandrotatedourimaginarybox.Inlast2exampleswehaveanalyzedtheoutputin2differentboxpositions,whiletheforcevectorremainedconstant.Whilethiswasusefulinunderstandinghowtheaccelerometerinteractswithoutsideforces,itismorepracticaltoperformcalculationsifwefixthecoordinatesystemtotheaxesoftheaccelerometerandimaginethattheforcevectorrotatesaroundus.
Pleasehavealookatthemodelabove,Ipreservedthecolorsoftheaxessoyoucanmakeamentaltransitionfromthepreviousmodeltothenewone.Justimaginethateachaxisinthenewmodelisperpendiculartotherespectivefacesoftheboxinthepreviousmodel.ThevectorRistheforcevectorthattheaccelerometerismeasuring(itcouldbeeitherthegravitationforceortheinertialforcefromtheexamplesaboveoracombinationofboth).Rx,Ry,RzareprojectionoftheRvectorontheX,Y,Zaxes.Pleasenoticethefollowingrelation:
R^2=Rx^2+Ry^2+Rz^2 (Eq.1)
whichisbasicallytheequivalentofthe Pythagoreantheoremin3D.
RememberthatalittlebitearlierItoldyouthatthevaluesofSQRT(1/2)~0.71arenotrandom.Ifyouplugthemintheformulaabove,afterrecallingthatourgravitationforcewas1gwecanverifythat:
1^2=(-SQRT(1/2))^2+0^2+(-SQRT(1/2))^2
simplybysubstitutingR=1,Rx=-SQRT(1/2),Ry=0,Rz=-SQRT(1/2)in Eq.1
Afteralongpreambleoftheorywe'regettingclosertoreallifeaccelerometers.ThevaluesRx,Ry,Rzareactuallylinearlyrelatedtothevaluesthatyourreal-lifeaccelerometerwilloutputandthatyoucanuseforperformingvariouscalculations.
Beforewegettherelet'stalkalittleaboutthewayaccelerometerswilldeliverthisinformationtous.Mostaccelerometerswillfallintwocategories(大多受加速度计可以分为以下两类):
digitalandanalog.Digitalaccelerometerswillgiveyouinformationusingaserialprotocol(协议)likeI2C,SPIorUSART,whileanalogaccelerometerswilloutputavoltagelevelwithinapredefinedrangethatyouhavetoconverttoadigitalvalueusinganADC(analogtodigitalconverter)module.IwillnotgointomuchdetailabouthowADCworks,partlybecauseitissuchanextensivetopicandpartlybecauseitisdifferentfromoneplatformtoanother.Somemicrocontrollerwillhaveabuilt-inADCmodulessomeofthemwillneedexternalcomponentsinordertoperformtheADCconversions.NomatterwhattypeofADCmoduleyouuseyou'llendupwithavalueinacertainrange.Forexamplea10-bitADCmodulewilloutputavalueintherangeof0..1023,notethat1023=2^10-1.A12-bitADCmodulewilloutputavalueintherangeof0..4095,notethat4095=2^12-1.
Let'smoveonbyconsideringasimpleexample,supposeour10bitADCmodulegaveusthefollowingvaluesforthethreeaccelerometerchannels(axes):
AdcRx=586
AdcRy=630
AdcRz=561
EachADCmodulewillhaveareferencevoltage,let'sassumeinourexampleitis3.3V.Toconverta10bitadcvaluetovoltageweusethefollowingformula:
VoltsRx=AdcRx*Vref/1023
Aquicknotehere:
thatfor8bitADCthelastdividerwouldbe255=2^8-1,andfor12bitADClastdividerwouldbe4095=2^12-1.
Applyingthisformulatoall3channelsweget:
VoltsRx=586*3.3V/1023=~1.89V(weroundallresultsto2decimalpoints)
VoltsRy=630*3.3V/1023=~2.03V
VoltsRz=561*3.3V/1023=~1.81V
Eachaccelerometerhasazero-gvoltagelevel,youcanfinditinspecs,thisisthevoltagethatcorrespondsto0g.Togetasignedvoltagevalueweneedtocalculatetheshiftfromthislevel.Let'ssayour0gvoltagelevelisVzeroG=1.65V.Wecalculatethevoltageshiftsfromzero-gvoltageasfollows:
:
DeltaVoltsRx=1.89V–1.65V=0.24V
DeltaVoltsRy=2.03V–1.65V=0.38V
DeltaVoltsRz=1.81V–1.65V=0.16V
WenowhaveouraccelerometerreadingsinVolts,it'sstillnoting(9.8m/s^2),todothefinalconversionweapplytheaccelerometersensitivity,usuallyexpressedinmV/g.LetssayourSensitivity=478.5mV/g=0.4785V/g.Sensitivityvaluescanbefoundinaccelerometerspecifications(规格).Togetthefinalforcevaluesexpressedingweusethefollowingformula:
Rx=DeltaVoltsRx/Sensitivity
Rx=0.24V/0.4785V/g=~0.5g
Ry=0.38V/0.4785V/g=~0.79g
Rz=0.16V/0.4785V/g=~0.33g
Wecouldofcoursecombineallstepsinoneformula,butIwentthroughallthestepstomakeitclearhowyougofromADCreadingstoaforcevectorcomponentexpresseding.
Rx=(AdcRx*Vref/1023–VzeroG)/Sensitivity (Eq.2)
Ry=(AdcRy*Vref/1023–VzeroG)/Sensitivity
Rz=(AdcRz*Vref/1023–VzeroG)/Sensitivity
Wenowhaveall3componentsthatdefineourinertialforcevector,ifthedeviceisnotsubjecttootherforcesotherthangravitation,wecanassumethisisthedirectionofourgravitationforcevector.IfyouwanttocalculateinclinationofdevicerelativetothegroundyoucancalculatetheanglebetweenthisvectorandZaxis.Ifyouarealsointerestedinper-axisdirectionofinclinationyoucansplitthisresultinto2components:
inclinationontheXandYaxisthatcanbecalculatedastheanglebetweengravitationvectorandX/Yaxes.Calculatingtheseanglesismoresimplethanyoumightthink,nowthatwehavecalculatedthevaluesforRx,RyandRz.Let'sgobacktoourlastaccelerometermodelanddosomeadditionalnotations:
TheanglesthatweareinterestedinaretheanglesbetweenX,Y,ZaxesandtheforcevectorR.We'lldefinetheseanglesasAxr,Ayr,Azr.Youcannoticefromtheright-angletriangleformedbyRandRxthat:
cos(Axr)=Rx/R,andsimilarly:
cos(Ayr)=Ry/R
cos(Azr)=Rz/R
Wecandeductfrom Eq.1 thatR=SQRT(Rx^2+Ry^2+Rz^2).
Wecanfindnowouranglesbyusingarccos()function(theinversecos()function):
Axr=arccos(Rx/R)
Ayr=arccos(Ry/R)
Azr=arccos(Rz/R)
We'vegonealongwaytoexplaintheaccelerometermodel,justtocomeuptotheseformulas.Dependingonyourapplicationsyoumightwanttouseanyintermediateformulasthatwehavederived.We'llalsointroducethegyroscopemodelsoon,andwe'llseehowaccelerometerandgyroscopedatacanbecombinedtoprovideevenmoreaccurateinclinationestimations.
Butbeforewedothatlet'sdosomemoreusefulnotations:
cosX=cos(Axr)=Rx/R
cosY=cos(Ayr)=Ry/R
cosZ=cos(Azr)=Rz/R
Thistripletisoftencalled DirectionCosine ,
 升级会员
升级会员 