地面平面控制测量规范标准.docx
《地面平面控制测量规范标准.docx》由会员分享,可在线阅读,更多相关《地面平面控制测量规范标准.docx(9页珍藏版)》请在冰豆网上搜索。
地面平面控制测量规范标准
平面控制测量规范
1地面平面控制网应按城市轨道交通工程建设规划网中各条线路建设先后次序,沿线路独立布设。
布网时应根据线路延伸和其他线路交叉状况,在线路延伸和交叉地段,必须有两个以上的控制点相重合。
城市近期规划与建设的城市轨道交通线路较多构成网络且原城市控制网不能满足建设需要时,宜建设一个覆盖全部线路的整体控制网。
2平面控制网由两个等级组成,一等为卫星定位控制网,二等为精密导线网,并分级布设。
3平面控制网的坐标系统应与所在城市现有坐标系统一致。
投影面高程应与城市现有坐标系投影面高程一致,若城市轨道交通工程线路轨道的平均高程与城市投影面高程的高差影响每千米大于5mm时,应采用其线路轨道平均高程作为投影面高程。
4想隧道内传递坐标和方位时,应在每个井(同)口或车站附近至少布设三个平面控制点作为联系测量的依据。
5反符合卫星定位控制网和精密导线网要求的现有城市控制网点的标石应充分利用。
6对于建成的卫星定位控制网和精密导线网应定期进行复测。
第一次复测应在开工前进行,之后应每年或两年复测1次,且应根据控制点稳定情况适当调整复测频次。
复测精度不应低于初测精度。
3.2卫星定位控制网测量
3.2.1卫星定位控制网测量前,应根据城市轨道交通线路规划设计,收集、分析线路沿线现有城市控制网的标石、精度等有关资料,并按静态相对原理进行控制网设计。
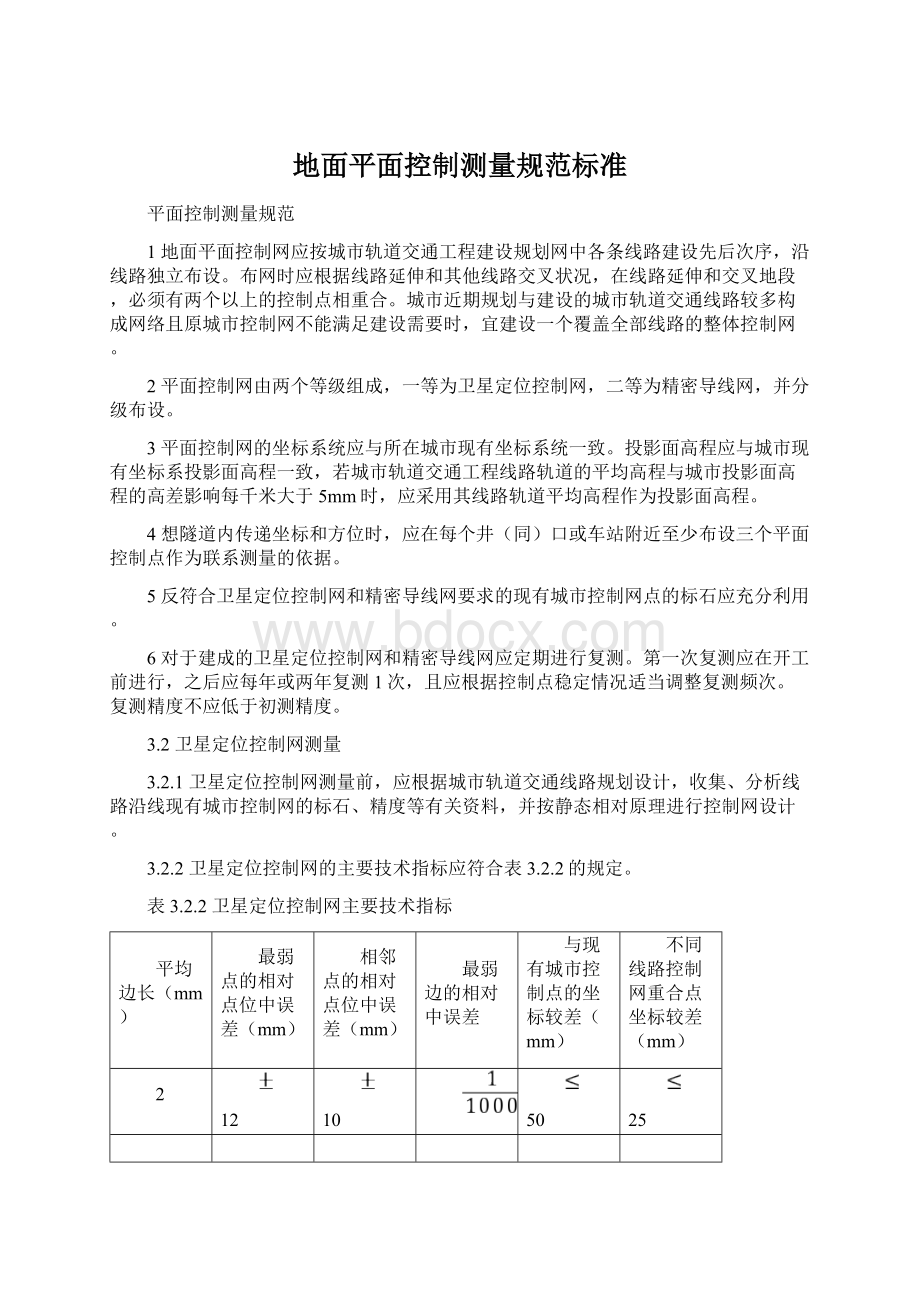
3.2.2卫星定位控制网的主要技术指标应符合表3.2.2的规定。
表3.2.2卫星定位控制网主要技术指标
平均边长(mm)
最弱点的相对点位中误差(mm)
相邻点的相对点位中误差(mm)
最弱边的相对中误差
与现有城市控制点的坐标较差(mm)
不同线路控制网重合点坐标较差(mm)
2
12
10
50
25
3.2.3卫星定位控制网相邻点间基线精度3.2.3式计算。
σ=(3.2.3)
式中σ——标准差,即基线向量的弦长中误差(mm);
a——固定误差(mm);
b——比例误差系数(1x10-6);
c——相邻点间的距离(km)。
3.2.4卫星定位控制网的布设应遵守以下原则:
1卫星定位控制网内应重合3—5个现有城市一、二等控制点,控制点应均匀布设;在不同线路交叉有联络线处或同一线路前后期工程衔接处布设2个以上的重合点,重合点坐标较差应满足表3.2.2的相关要求;
2卫星定位控制网应沿线路两侧布设,控制点宜布设在隧道出入口、竖井或车站附近,车辆段附近布设3—5个控制点,相邻控制点应满足通视要求;
3卫星定位控制网非同步独立观测时,必须构成闭合环或复合路线。
每个闭合环或附合路线中的边数不应大于6条。
3.2.5卫星定位控制点的选点应符合以下要求:
1控制点间有两个以上方向通视;
2当利用已有城市控制点时,应检查该点的稳定性及完好性;
3控制点应选在利于长久保存、施测方便和施工变形影响范围以为的地方;
4建筑上的控制点应选在便于联测的楼顶承重结构上;
5控制点附近不应有大面积的水域或电磁波反射(或吸引)强烈的物体;
6控制点与无线电发射装置的间距应大于200m,与高压输电线的间距应大于50m。
3.2.6卫星定位控制点均应埋设永久标石。
建筑顶上的标石可现场浇筑。
标石宜按本规范附录A中的图A.0.1、图A.0.2、图A.0.3形式和规格埋设。
标石结束后应按本规范附录A中A.0.6绘制点之记,点位标石应牢固清楚,并应办理测量标志委托保管书。
3.2.7车站、洞口和竖井附近建筑上的卫星定位控制点上宜建造三角钢架或竖立照准杆,三角钢架宜按本规范附录A中的图A.0.4规格制作。
3.2.8卫星定位控制网测量作业的基本技术要求应符合表3.2.8的规定。
表3.2.8卫星定位控制网测量作业基本技术要求
项目
要求
接收机类型
双频或单频
观测量
载波相位
接收机标称精度
(10mm+2x10-6xD)(D为相邻点间的距离)
卫星高度角(度)
15
同步观测接收机(台)
3
有效观测卫星数(颗)
4
平均重复设站数(次)
2
观测时段长度(min)
60
数据采样间隔(s)
10
点位几何图形强度因子(PDOP)
6
3.2.9作业前应对卫星定位接收机和天线等设备进行常规检查,检查内容应包括:
仪器检定结果、电池容量、光学对中器和接收机内存容量等。
3.2.10观测前应根据接收机数量、控制网设计图形以及交通情况编制作业设计,观测中可根据实际情况进行必要的调整。
3.2.11卫星定位标志应满足以下列要求:
1天线定向标志应指正北,且经整平、对中后,其对中误差应小于2mm;
2每时段观测前、后量取天线高各一次,两次互差小于3mm时,应取其两次平均值作为最后结果;
3应严格按规定的时间开机作业,保证同步观测同一组卫星;观测开始后,应及时记录或输入有关数据并随时注意卫星信号和信息存储情况;外业观测手簿应按本规范附录A中表A.0.5的内容逐项填写;
4每日观测结束后,应及时将存储介质上的数据进行拷贝,并及时将外业观测记录结果录入计算机进行数据处理。
3.2.12平差前应对观测数据进行预处理。
基线解算时,对于小于8KM的短基线必须采用双差固定解;对于8—30KM长基线可在双差固定解和双差浮点解中选择最优结果。
对周跳较多或数据质量欠佳的时段应进行删除或用分段处理后的数据进行解算。
基线解算采用卫星广播星历坐标值作为基线解的起算数据,基线解算结果中基线长度中误差输出值不应超过2倍中误差。
3.2.13卫星定位控制网外业观测的全部数据应经同步环、独立环及复测边检核,并应满足下列要求:
1同步环各坐标分量及全长闭合应满足式(3.2.13-1)—(3.2.13-5)的要求:
Wx=<
(3.2.13-1)
Wy=<
(3.2.13-2)
Wz=<
(3.2.13-3)
W=
(3.2.13-4)
W=<
(3.2.13-5)
式中N——同步环中基线边的个数;
W——环闭合差。
2独立基线构成的独立环各坐标分量及全长闭合差应满足式(3.2.13-6)——(3.2.13-9)的要求:
Wx<=2
(3.2.13-6)
Wy<=2
(3.2.13-7)
Wz<=2
(3.2.13-8)
W<=2
(3.2.13-9)
式中n——独立环中基线边的个数。
3复测基线长度较差应满足下列的要求:
ds<=2(3.2.13-10)
式中n——同一边复测的次数,通常为2.
3.2.14卫星定位控制网的平差要求应符合下列规定:
1应将全部独立基线构成闭合图形,以三维线向量及其相应方差协方差阵作为观测信息,以一点的城市现有WGS-84坐标系的三维坐标作为起算数据,在WGS-84坐标系中进行三维无约束平差,并提供WGS-84坐标系的三维坐标、坐标差观测值的总改正数、基线边长及点位和边长的精度信息。
基线差观测值的总改正数、基线边长及点位和边长的精度信息。
基线向量改正数的绝对值应满足式(3.2.14-1)——(3.2.14-3)的要求:
VΔx<=3σ(3.2.14-1)
VΔx<=3σ(3.2.14-2)
VΔx<=3σ(3.2.14-3)
2应在所使用的城市坐标系中进行约束平差及精度评定,并应输出相应坐标系中的坐标、基线向量改正数、基线边长、方位角以及相关的中误差、相对点位中误差的精度信息,转换参数及其精度信息等。
基线向量的改正数与同名基线无约束平差相应改正数的较差满足式(3.2.14-4)——(3.2.14-6)的要求:
dVΔx<=2σ(3.2.14-4)
dVΔy<=2σ(3.2.14-5)
dVΔz<=2σ(3.2.14-6)
3.2.15进行约束平差后,当卫星定位控制点与现有城市控制点的重合点的坐标较差大于本规范表3.2.2的规定时,应检查已知点是否可靠,并对约束控制点和控制方位角进行筛选后,重新进行不同约束控制点或不同约束方位角的不同组合的约束平差。
3.2.16卫星定位控制网测量结束后,应提交下列资料;
1技术设计书;
2控制点点之记及测量标志委托保管书;
3控制网示意图;
4外业观测手簿及其他记录;
5控制网平差及精度评定质料;
6控制点成果表;
7技术总结。
3.3精密导线网
3.3.1精密导线网测量的主要技术要求应符合表3.3.1的规定。
表3.3.1精密导线测量主要技术要求
平均边长
闭合环或附合导线总长度(km)
每边测距中误差
测角中误差(”)
水平角
测回数
边长测回数
方位角闭合差(”)
全长相对闭合差
相邻点的相对点位中误差
Ⅰ级全站仪
Ⅱ级全站仪
350
3~4
±4
1/60000
4
6
往返测距各2测回
±5
1/35000
±8
注:
1n为导线的角度个数,一般不超过12;
2附合导线路线超长时,宜布设节点导线网,节点间季度个数不超过8个;
3全站仪的分级标准执行本规范附录A.0.7的规定。
3.3.2精密导线网应沿线路方向布设,并应布设成附合导线、闭合导线或节点导线网的形式。
3.3.3选择精密导线点时,应符合下列要求:
1附合导线的边数宜少于12个,相邻的短边不宜小于长边的1/2,个别短边的边长不应小于100m。
2导线点的位置应选在施工变形影响范围以外稳定的地方,并应避开地下构筑物、地下管线等;
3楼顶上的导线点宜选在靠近并能俯视线路、车站、车辆段一侧稳固的建筑上;
4相邻点间以及导线点与其他相邻的卫星定位点之间的垂直角不应大于30°,视线离障碍物的距离不应小于1.5m,避免旁折光的影响。
5线路交叉及前、后期工程衔接的地方应布设适量的共用导线点。
6应充分利用现有城市控制点标石。
3.3.4在地面宜按本规范附录A中图A.0.8的规格埋设精密导线点标石,在楼顶可按本规范附录A中图A.0.3的规格埋设标石。
埋设结束后,应绘制点之记。
3.3.5导线测量前应对仪器进行常规检查与校正,同时记录检校结果。
3.3.6导线点上只有两个方向时,其水平角观测应符合以下要求:
1应采用左、右角观测,左、右角平均值之和与360°的较差应小于4”;
2前后视边长相差较大,观测需调焦时,宜采用同一方向正倒镜同时观测法,此时一个测回中不同方向可不考虑2C较差的限差。
3水平角观测一测回内2C较差,Ⅰ级全站仪为9″,Ⅱ级全站仪为13″。
同一方向值各测回较差,Ⅰ级全站仪为6″,Ⅱ级全站仪为9″。
3.3.7在精密导线网节点或卫星定位控制点上观测水平角时,应符合以下要求:
1在附合导线两端的卫星定位控制点上观测时,宜联测两个卫星定位控制点方向,夹角的平均观测值与卫星定位控制点坐标反算夹角之差应小于6″;
2方向数超过3个时宜采用方向观测法,方向数不多于3个时可不归零;
3方向观测水平角观测的技术要求应符合表3.3.7的规定。
表3.3.7方向观测法水平角观测技术要求(″)
全站仪的等级
半测回归零差
一测回内2C较差
同一方向
各测回较差
Ⅰ级全站仪
6
9
6
Ⅱ级全站仪
8
13
9
3.3.8附合精密导线或精密导线环的方位角闭合差(Wβ),不应大于下式计算的值
Wβ=±2mβ
(3.3.8)
式中mβ—本规范表3.3.1中的测角中误差(″);
n—附合导线或导线环的角度个数。
3.3.9精密导线网测角中误差(M0)应按下式计算:
M0=±
(3.3.9)
式中fβ—附合导线或闭合导线环的方位角闭合差;
n—附合导线或导线环的角度个数
N—附合导线或闭合导线环的个数
3.3.10精密导线网测距时应符合下列要求:
1距离测量除应符合本规范表3.3.1的要求外,还应符合表3.3.10的规定:
表3.3.10距离测量限差技术要求(mm)
全站仪的等级
一测回中读数间较差
单程各测回间较差
往返测或不同
时段结果较差
Ⅰ级全站仪
3
4
2*(a+bd)
Ⅱ级全站仪
4
6
注:
1(a+bd)为仪器标称精度,a为固定误差,b为比例误差,d为距离测量值(以千米计);
2一测回指照准目标一次读数4次。
2测距时应该读取温度和气压,测前、测后各读取一次,取平均值作为测站的气象数据。
温度读至0.2°C,气压读至50Pa。
3.11.3精密导线网边长应按下列要求进行改正:
1气象改正,根据仪器提供的公式进行改正;也可将气象数据输入全站仪内自动改正。
2仪器加、乘常数改正值S,应按下式计算:
S=S0+S0*K+C(3.3.11-1)
式中S0—改正前的距离;
C—仪器加常数;
K—仪器乘常数。
3利用垂直角计算水平距离D时应按下式计算:
D=S*cos(α+f)(3.3.11-2)
F=(1-K)ρS*cosα/(2R)(3.3.11-3)
式中α—垂直角观测值;
K—大气折光系数;
S—经气象及加、乘常数改正后的斜距(m);
R—地球平均曲率半径(m);
f—地球曲率和大气折光对垂直角的修正量(″);
ρ—弧与度的换算常数,ρ=206265(″)。
3.3.12精密导线网测距边的高程归化和投影改化,应符合下列规定:
1归化到城市轨道交通线路测区平均高程面上的测距边长度D,应按下式计算:
D=D′0[1+(Hp-Hm)/R](3.3.12-1)
式中D′0—测距两端点平均高程面上的水平距离(m);
Rm—参考椭球体在测距边方向法截弧的曲率半径(m);
Hp—现有城市坐标系统投影面高程或城市轨道交通工程线路的平均高程(m)。
2测距边在高斯投影面上的长度Dz,应按下式计算:
Dz=D[1+Ym^2/(2*Rm^2)+△Y^2/(24*Rm^2)](3.3.12.-2)
式中Ym—测距边两端点横坐标平均值(m);
Rm—测距边中点的平均曲率半径(m);
△Y—测距边两端点近似横坐标的增量(m)。
3.3.13精密导线网计算应采用严密平差方法,其精度应符合规范表3.3.1的规定。
3.3.14精密导线网测量结束后,应提交下列资料:
1技术设计书;
2外业观测记录与内业计算成果;
3导线网示意图;
4导线点点之记;
5导线点坐标及其精度评定成果表;
6技术总结。
 升级会员
升级会员 