机械类 数控 外文翻译 外文文献 英文文献 光电编码器的特性及应用.docx
《机械类 数控 外文翻译 外文文献 英文文献 光电编码器的特性及应用.docx》由会员分享,可在线阅读,更多相关《机械类 数控 外文翻译 外文文献 英文文献 光电编码器的特性及应用.docx(16页珍藏版)》请在冰豆网上搜索。
机械类数控外文翻译外文文献英文文献光电编码器的特性及应用
Thepropertiesandapplicationofphotoelectricencoder
Theworkingprinciple,photoelectricencoder
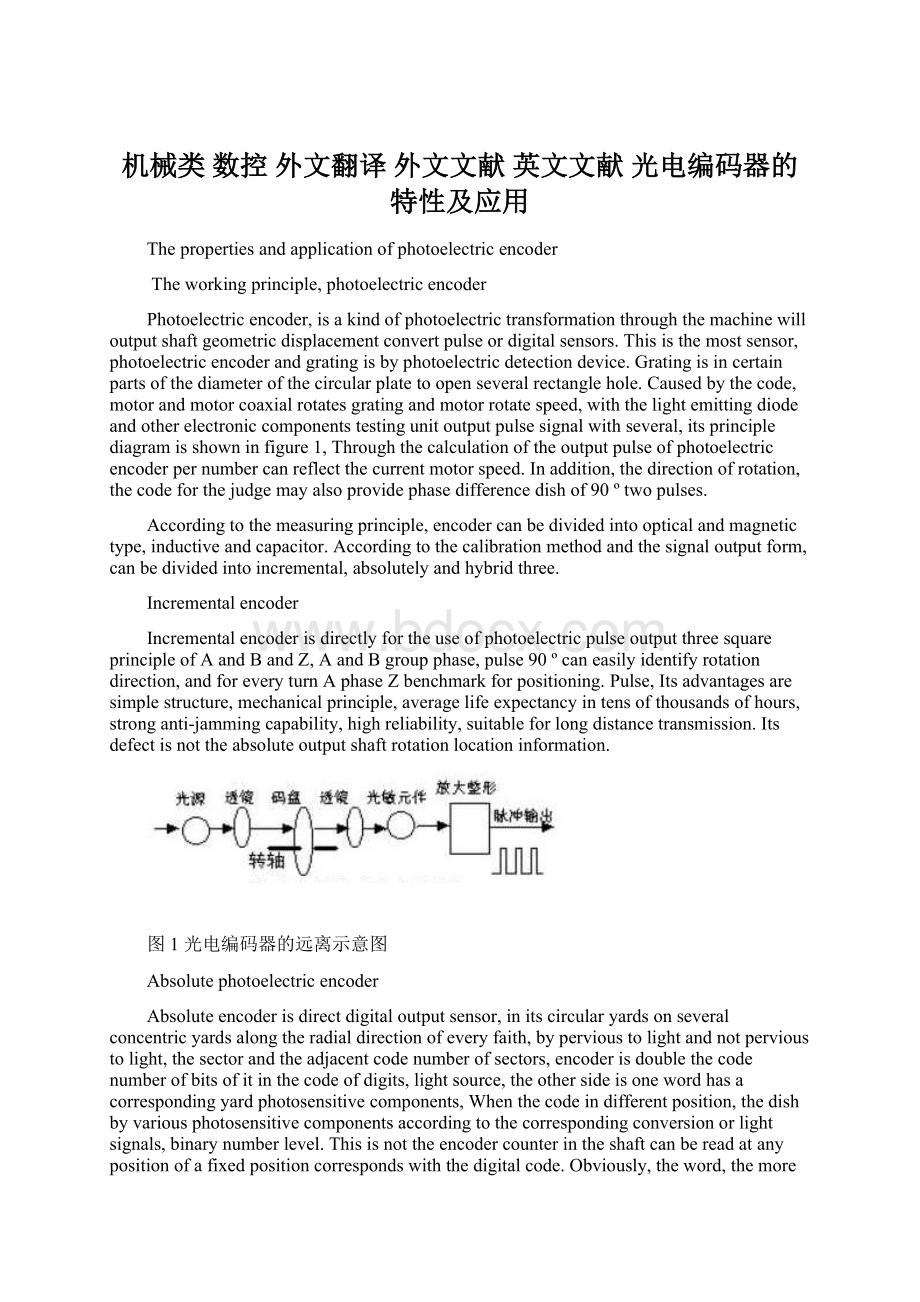
Photoelectricencoder,isakindofphotoelectrictransformationthroughthemachinewilloutputshaftgeometricdisplacementconvertpulseordigitalsensors.Thisisthemostsensor,photoelectricencoderandgratingisbyphotoelectricdetectiondevice.Gratingisincertainpartsofthediameterofthecircularplatetoopenseveralrectanglehole.Causedbythecode,motorandmotorcoaxialrotatesgratingandmotorrotatespeed,withthelightemittingdiodeandotherelectroniccomponentstestingunitoutputpulsesignalwithseveral,itsprinciplediagramisshowninfigure1,Throughthecalculationoftheoutputpulseofphotoelectricencoderpernumbercanreflectthecurrentmotorspeed.Inaddition,thedirectionofrotation,thecodeforthejudgemayalsoprovidephasedifferencedishof90ºtwopulses.
Accordingtothemeasuringprinciple,encodercanbedividedintoopticalandmagnetictype,inductiveandcapacitor.Accordingtothecalibrationmethodandthesignaloutputform,canbedividedintoincremental,absolutelyandhybridthree.
Incrementalencoder
IncrementalencoderisdirectlyfortheuseofphotoelectricpulseoutputthreesquareprincipleofAandBandZ,AandBgroupphase,pulse90ºcaneasilyidentifyrotationdirection,andforeveryturnAphaseZbenchmarkforpositioning.Pulse,Itsadvantagesaresimplestructure,mechanicalprinciple,averagelifeexpectancyintensofthousandsofhours,stronganti-jammingcapability,highreliability,suitableforlongdistancetransmission.Itsdefectisnottheabsoluteoutputshaftrotationlocationinformation.
图1光电编码器的远离示意图
Absolutephotoelectricencoder
Absoluteencoderisdirectdigitaloutputsensor,initscircularyardsonseveralconcentricyardsalongtheradialdirectionofeveryfaith,bypervioustolightandnotpervioustolight,thesectorandtheadjacentcodenumberofsectors,encoderisdoublethecodenumberofbitsofitinthecodeofdigits,lightsource,theothersideisonewordhasacorrespondingyardphotosensitivecomponents,Whenthecodeindifferentposition,thedishbyvariousphotosensitivecomponentsaccordingtothecorrespondingconversionorlightsignals,binarynumberlevel.Thisisnottheencodercounterintheshaftcanbereadatanypositionofafixedpositioncorrespondswiththedigitalcode.Obviously,theword,themorethehighresolution,foraNbinaryresolutioncodercodesalvermusthaveNbarcode.Currentlythereare16bitsofabsoluteencoderproducts.
Singlechannelabsolutephotoelectricshaftencoderisusingthenaturalbinaryorcircularbinary(Gregoryyards)mannerphotoelectricconversion.Absolutephotoelectricencoderandincrementalencoderdiffersnotpervioustolightonthedisk,theline,absoluteencodersmayhavegraphics,accordingtothenumberofcodereadcodeoncoding,detectionabsoluteposition.Codedesigncanusebinarycode,circulation,binarycomplement,etc.Itsfeaturesare:
CanreadAngleofabsolutecoordinatesdirectly.
Noaccumulativeerror.
Powerexcisionlocationinformationwouldbelost.Buttheresolutionisdeterminedbythebinarydigits,i.e.,precisiondependsonthemedian10,14etc.
Hybridabsoluteencoder.
Hybridabsoluteencoders,itsoutputoftwogroups:
agroupofinformation,informationfortestingpoleswithabsoluteinformationfunction,Anothergroupofincrementalencoderiscompletelywiththeoutputinformation.
PhotoelectricencoderisanAngle(angularvelocity)detectiondevice,itwillinputshaftAnglefor,usingtheprincipleofphotoelectricconvertelectricalordigitalaccordingly,smallsize,highaccuracy,highreliability,digitalinterface,etc.Itiswidelyappliedinncmachinetools,turningmachine,servodrive,robots,radarandmilitarytargetswereneededintheAngleofdeviceandequipment.
Appliedcircuitofphotoelectricencoder
EPC-755Aapplicationofphotoelectricencoder
EPC-755AphotoelectricencoderandtheuseofgoodperformanceinAnglemeasurement,displacementmeasurement,andhasstronganti-jammingcapabilityoftheoutputpulsesignalisstableandreliable,andthepulsesignalcanbeobtainedbycountingweremeasuredafterthedigitalsignal.Therefore,weinthecardrivingsimulators,steeringwheelrotationAnglemeasurementchoosesEPC-755Aphotoelectricencoder,theoutputcircuitassensors,chooseopencollectoroutputresolutionselection360pulse/circle,consideringthesteeringwheelrotationisatwo-waystreet,clockwiseandcounterclockwise,canalsoneedstotheoutputsignalphasecodertocount.Figure2showstheactualuseofphotoelectricencoderanddiscrimination,phasetwo-waycountscircuitwithaDflip-flopcircuitandtwocross-couplednandgates,with74LS1933countscircuit.
图2光电编码器鉴相计数电路
Whenthephotoelectricencoderclockwise,channel,AleadingchanneloutputwaveformofoutputwaveformB90°,Dflip-flopoutputwaveformW1)forQ(highlevel,Q(W2)forlow-levelwaveformcross-couplednandgates,open,countingpulsewaveformW3)by(bidirectional,sendtothe74LS193counterCUinputpulses,addcount,Atthistime,below,itsoutputcross-couplednandgatescloseforhighlevel(waveformW4).Whenthephotoelectricencodercounter-clockwise,channelAoutputwaveformofoutputwaveformdelaythanchannelB90°,Dflip-flopoutputwaveformW1)forQ(lowlevel,Q(W2)forhighlevelwaveform,theoutputcross-couplednandgatesclose,highlevel(waveformW3),Now,twocross-couplednandgatesopen,countingunderimpulsivethrough(waveformW4),sendtotwo-way74LS193counterreducedinputpulses,CD.Subtraction.
Steeringwheelclockwiseandcounter-clockwise,themaximumrotationAnglefortwolaps,chooseresolutionfor360pulse/circleoftheoutputpulsecoder,itsbiggestfor900,Actualusethreeslicesofcountscircuit74LS193componentinthesystemofinitialization,thesignalreset(CLR),theinitialsetfor800H,namely2048(LD);thesignal,So,whenthesteeringwheelclockwise,counttheoutputcircuitfor2048~2948,whensteeringcounter-clockwise,counttheoutputcircuitfor2048-804,D0outputdatacountscircuitD11~todataprocessingcircuit.
Inpractice,thesteeringwheelfrequentlymadeclockwiseandcounterclockwiserotation,becauseexistence,worklongerquantizationerrorafteraperiodoftime,thesteeringwheelwhentheoutputofacircuittocount,butmaynot2048severalwordsdeviation,Tosolvethisproblem,weaddedasteeringwheeltodetectcircuits,systems,dataprocessingcircuitafterworkontheoperationstateinthesimulator,systemtestintheback,ifdetectioncircuitinthebackwheel,andcountscircuitinthedataoutput,butnottocount2048resetcircuit,andtheinitialreset.
Photoelectricencodergravitymeasurementinstrumentintheapplication
Therotaryphotoelectricencoder,theshaftandgravitymeasuringinstrumentforknobshaft.Gravitymeasurementoftheangulardisplacementvolumeknobcompensationforasignalistransformed,Rotaryphotoelectricencoderandabsoluteencodertwopointsandincrementalencoder.
Incrementalencoderistheoutputpulseform,itscodeplatesensorthanabsoluteencodercodeeasiertodiskandhigherresolution.Generallyneedonlythreebarcode,here'scodehasnotactuallyhadwordofabsoluteencodercode,butproducecountingpulse.It'scodeofWaiDaoandmiddlewayhasthesamenumberofuniformdistributionofnotpervioustolightandsector(raster),butistwosectormutualstaggerhalfarea.Whenthecodesalver,turningtheoutputsignalisAdifferencefor90°withBinthepulsesignalandonlyonethirdoftheslitperviouswordcodegeneratedbythepulsesignal(itasthebenchmarkcodesalverposition,toprovideaninitialcountingsystemofzerosignal).FromA,Btwooutputsignalphaserelationship(aheadorbehind)canjudgethedirectionofrotation.Graph3by(a),whenthecodedishisaword,pulsethanBgroundPI/2,andreverse,awordthanBlaggingwayspulsesPI/2.Figure3.(b)isApracticalcircuit,useAwordofplasticwavealongthesteady-stateproducessingletriggerwordandbarepulsewavephase'and'plasticdisc,whenthecodeisonlypositivemouthpulseoutput,whereasonlyreversemouthpulseoutput.Therefore,theincrementoftheoutputpulsecoderisaccordingtothesourceandpulsecounttodeterminethedirectionandthecodesalver.RelativeangularUsually,iftheencoderhasN(yards),itsoutputsignalphasedifferenceofPI/N,maycountforthenumberoftimesthegrating2Npulse,N=2.Figure3circuitfaultsaresometimesmistakepulse,thiserrorinasignalinahigh"or"low",and"levelothersignalisin"high"and"low"andchangeofstate,thoughcodesalver,butwillproduceashiftintheoutputpulse.Forexample,codesalverormanualalignmentoccursjitterposition(belowcansee,inspringgravimetersmeasurementwillhavethiskindofcase).
图3增量光电编码器基本波形和电路
图4四倍计数方式的波形和电路
Figure4isacanpreventerrorandcanimprovetheresolutionofthepulsefrequencysubdivisioncircuitfourtimes.Here,thefunctionofmemoryisDflip-flopandclockgenerator.Figure4shows,byeverytwoDflip-flop,sotakeintheclockpulse,theintervaloftwoQend(suchasthecorrespondingB74LS1752,7foot)maintaintwoclockperiod,ifbothinputstatus,saidthechangein,Otherwise,canaccordingtotherelationshipbetweenthechangesfromtheparty,whichis"to"or"backward"outputpulse.Whenawordbecauseofhighvibrationinthe'','low",willchangebetweenreciprocatingalternate"positive"and"backward"pulse,thetwocounteronthenumberandreplac
 升级会员
升级会员 