最新MTF概论.docx
《最新MTF概论.docx》由会员分享,可在线阅读,更多相关《最新MTF概论.docx(16页珍藏版)》请在冰豆网上搜索。
最新MTF概论
【关键字】方法、地方、有效、密切、快速、了解、位置、理想、需要、能力、需求、方式、水平、分析、方向、中心
最新MTF概论
第一章:
MTF概論
1-1MTF的定義
Modulation的定義--
在這一個課程中,我們要進行的是有關鏡頭的MTF量測介紹。
MTF的英文全名是ModulationTransferFunction,翻譯成中文就是光學調制傳遞函數,它有另外一個名稱叫做ContrastTransferFunction,也就是:
對比度轉換函數。
從名稱來看,我們可以知道MTF有光學對比的概念在裡面。
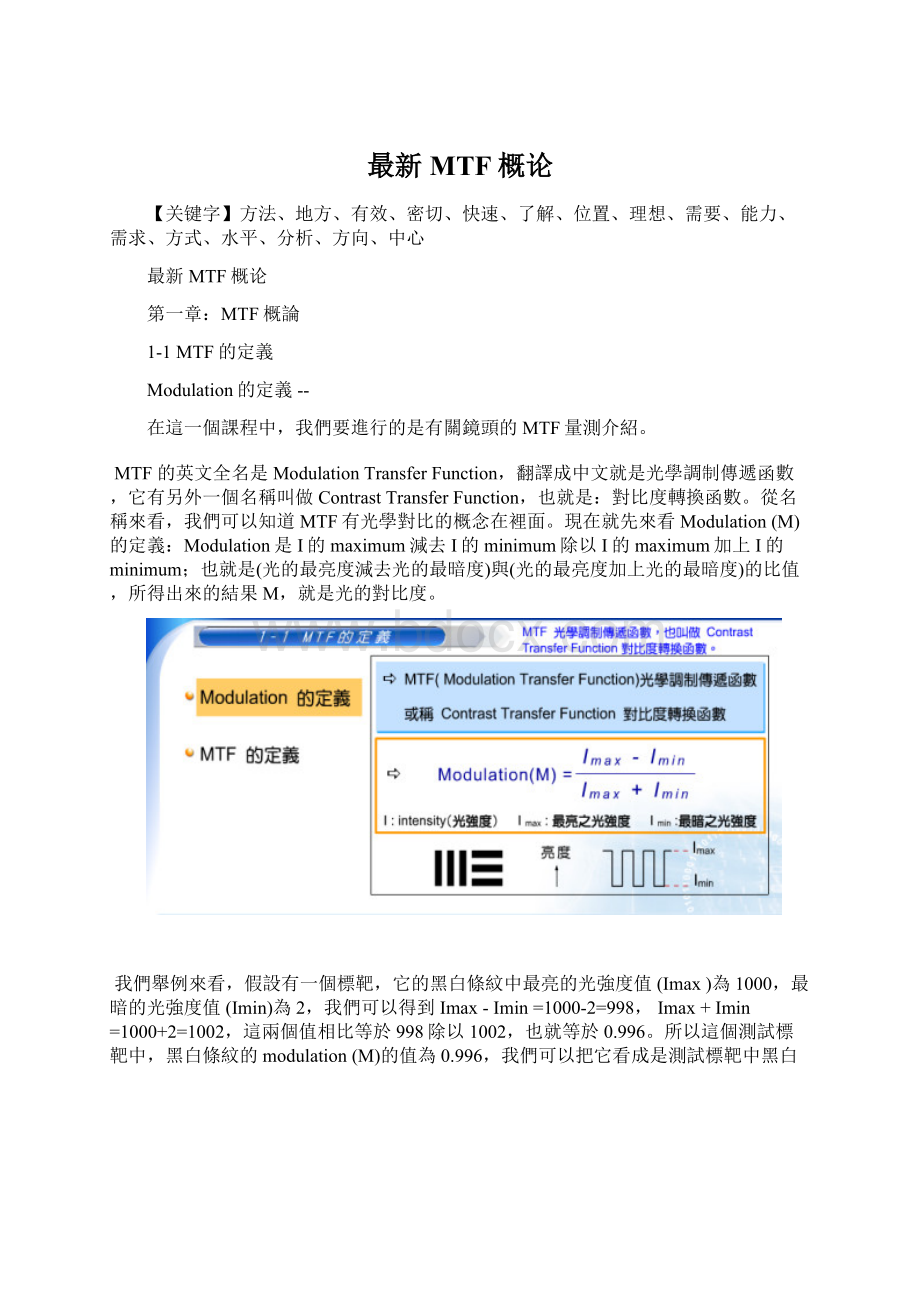
現在就先來看Modulation(M)的定義:
Modulation是I的maximum減去I的minimum除以I的maximum加上I的minimum;也就是(光的最亮度減去光的最暗度)與(光的最亮度加上光的最暗度)的比值,所得出來的結果M,就是光的對比度。
我們舉例來看,假設有一個標靶,它的黑白條紋中最亮的光強度值(Imax)為1000,最暗的光強度值(Imin)為2,我們可以得到Imax-Imin=1000-2=998,Imax+Imin=1000+2=1002,這兩個值相比等於998除以1002,也就等於0.996。
所以這個測試標靶中,黑白條紋的modulation(M)的值為0.996,我們可以把它看成是測試標靶中黑白條紋的對比值。
Modulation基本上可以看成是經過歸一化的對比值。
何謂歸一化?
歸一化指的是normalize,意思是它的最大值為1。
怎麼說呢?
就一般投影機測試而言,對比度的定義是Imax除以Imin,如果以這個例子來看,Imax=1000,Imin=2,那麼它的對比度就是(Imax/Imin)=1000/2=500。
由此例,我們可以看出歸一化的對比度(Modulation)與一般的對比度(Contrast)的定義上的不同。
然而,相同的是--它們都是對比度的表示方式。
MTF的定義--
在物空間,有物的Modulation。
在像空間,有成像的Modulation,我們知道Modulation其實代表的就是對比度(contrast)。
為什麼兩者的Modulation會有所差異呢?
這是因為透鏡有像差,成像品質不見得非常好的關係。
在測試標靶上,黑白分明的條紋經過透鏡投射出來的成像會比較模糊。
在這裡,物的Modulation指的就是測試標靶的黑白條紋對比度,而像的Modulation指的就是測試標靶經過透鏡成像後之黑白條紋對比度。
我們稱物的Modulation為Mo,像的Modulation為Mi,而MTF就是Mi比上Mo的值。
舉例而言,測試標靶的Modulation為0.8(我們以Mo表示),經過鏡頭成像後所得的modulation為0.4(我們以Mi來表示)。
那麼,根據定義,MTF值就是(Mi/Mo)=(0.4/0.8)=0.5。
所以,我們可以將MTF看成是鏡頭品質好壞的評估條件。
如果說,測試標靶經過某個鏡頭A成像後,它的成像品質與原先的測試標靶一樣清晰,那麼以此例而言,原先測試標靶的Modulation值(Mo)=0.8,成像最好的情況下,Modulation值(Mi)也只能達到0.8,此時,MTF將可達到1.0。
然而,一般的情況下,鏡頭因為本身擁有像差的先天不良條件,使得成像品質受限,因此成像後的Modulation值(Mi)低於原先測試標靶的Modulation值(Mo),如果測試標靶經過另一個鏡頭B成像後,Mi=0.5,那麼MTF=(Mi/Mo)=(0.5/0.8)=0.625。
如果有個儀器,事先就設定好測試標靶的Modulation值(Mo),並且可以偵測出經由鏡頭成像後的影像,並計算求得標靶成像的Modulation值(Mi),那麼,鏡頭的MTF值就可以被計算出來了。
對於鏡頭而言,像差愈大,鏡頭的光學品質愈差,MTF值愈低。
所以,對於成像用之鏡頭設計,均以MTF值為設計分析指標。
1-2MTF的重要相關概念
MTFvs.空間頻率--
MTF和黑白條紋線對的分佈密度關係十分密切。
圖A為測試標靶。
但透過光學系統成像,看到的不再是清楚的黑白條紋,我們以圖A來解釋空間頻率。
空間頻率(ν)指的就是黑白條紋線對的密度,單位為lp/mm,其中,lp代表linepair,mm代表permini-meter,表示1mm內含有多少組的黑白線對。
要如何計算黑白條紋的寬度呢?
假設1個mm內含有N組黑白線對,那麼,我們稱這個測試標靶的黑白線對之空間頻率(ν)=Nlp/mm,每組黑白條紋的寬度則為(1/N)mm,每條黑色條紋之寬度則為(1/2N)mm,每條白色條紋之寬度亦為(1/2N)mm。
從圖C中我們可以看出每組黑白條紋經過光學系統成像後,變得較為模糊。
一般而言,條紋愈細,對比度愈低,MTF相對的也就愈低。
此代表MTF值隨著黑白線對之空間頻率改變而有所差異。
事實上,MTF本身就是空間頻率的函數MTF(ν)。
至於為何黑白線對條紋愈密,MTF值愈低?
此乃因為光線在黑白線對邊緣造成的繞射、散射或漫射效應。
也就是少數通過白線區域的邊緣光線會偏折、跑向黑色區域,造成影像區域裡面黑不夠黑(也就是暗區不夠暗)、白不夠白(也就是亮區不夠亮)的成像問題,條紋愈密集愈造成此黑白對比度下降之情況,進而造成MTF值下降。
MTFvs.系統解像力需求--
這是系統MTF需求圖,橫軸為空間頻率,縱軸為MTF值,MTF之最大值為1。
藍色虛線代表系統要求規格,也就是說,在多少linepair的時候,必須達到多少MTF值,才能符合系統要求。
假設A曲線是某鏡頭的MTF表現,那麼,我們可以從圖中看出,在空間頻率為Nlp/mm、MTF值在0.2以上的時候,該鏡頭才符合系統標準。
現在我們來看另一張圖。
假設有兩個鏡頭:
A和B。
從圖中可看出在低頻的時候,A鏡頭的表現比B鏡頭來的好,然而,在高頻的時候,B鏡頭反而表現得比A鏡頭來的好。
但以圖中藍色虛線的系統要求規格來看,也就是在空間頻率為Nlp/mm,MTF值必須在0.2以上,這兩個鏡頭其實都在符合標準之內,都是可用的。
只是在高頻的部分,鏡頭A的對比度會比鏡頭B的對比度來得低。
再來看另一個例子。
曲線A和曲線B代表兩個不同的鏡頭。
如果以N1的需求來看,空間頻率為N1lp/mm,MTF值要求在0.2以上,這兩個鏡頭都符合標準;但是,如果有另一個需求是N2lp/mm,MTF值要求在0.3以上。
那麼,就只有鏡頭B達到合格標準了。
鏡頭對光源之擴散函數效應--
之前我們提到,物件經過光學系統,其成像會較為模糊,光源亦是如此。
當點光源通過光學鏡頭之後,由於光學鏡頭的像差品質等因素,使得點光源之成像為點光暈成像。
由CCD偵測其點光暈成像之光強度訊號,取其光強度訊號之截面圖,再與原先未經過光學鏡頭之光源訊號截面圖相比較,可了解點光源之光強度訊號經過光學鏡頭之後就被擴散了,因此我們可以說光學鏡頭對於這個光源有擴散效應,由光源與光源影像的光強度分佈曲線,可計算求得鏡頭對於此光源的擴散函數效應。
當光源透過鏡頭成像,點光源或線光源會有光暈的影像,而非清晰的點或線,我們將這個光源成像的光強度做一個剖面而得到一個函數,統稱為光源的擴散函數。
鏡頭對點光源成像的函數,我們叫做點擴散函數PointSpreadFunction,鏡頭對線光源成像的函數,我們叫做線擴散函數LineSpreadFunction。
1-3MTF的計算
MTF的計算是一個複雜的計算公式,必須搭配不同的光源做不同的計算,例如:
雷射光源與白光光源的MTF計算方式就有差異。
同時,MTF值又與空間頻率有關。
在這裡我們將之簡化,只以它的物理特性來探討。
假設我們今天使用的是狹縫光源,經過待測鏡頭,會成為一個狹縫光源影像。
我們以偵測器偵測它的光訊號,然後計算出光源的線性擴散函數,最後,經過光學傅立葉函數的轉換運算而得到OTF值的結果。
OTF為光學傳遞函數,此值包含實數與虛數兩個部份。
取其實數部分即為MTF值,取其虛數部分則為PTF值。
MTF值與空間頻率的關係可由傅立葉公式轉換計算而得,詳細的計算方式與推演過程較為繁複,不在這裡介紹。
第二章:
MTF量測系統架構
2-1InfiniteConjugate
各種光學鏡頭(組)之架構--
在進行MTF量測之前,必須先了解待測鏡頭所使用之光學系統安排。
依照其設計需求安排好量測架構,方能進行後續的量測動作。
光學鏡頭系統設計,基本上架構的安排可分為三種:
第一種是無窮共軛系統(InfiniteConjugate),光線從無窮遠的方向射入鏡頭,然後聚焦到某一點,典型的例子就是照相機鏡頭對遠方物體拍照的使用情況。
第二種是有限共軛系統(FiniteConjugate),表示鏡頭的物、像都在有限的距離範圍內。
典型的例子是投影機光學鏡頭,它的物指的是LCD面板,它的像--就是我們所看到的螢幕畫面,是在有限的數公尺範圍內。
最後一種是無焦系統(AfocusSystem),無窮遠的平行光射入鏡頭,經過此無焦鏡頭系統之後,也是平行光射出,並沒有一個聚焦點,最好的例子就是天文望遠鏡。
我們在測量MTF值時,就必須考慮不同的光學系統架構以安排符合此光學系統設計之量測架構。
Infinite-Conjugate量測架構--
這是實際的MTF量測系統架構。
我們先來看InfiniteConjugate(無窮共軛系統)的量測架構。
光源經過反射鏡1反射到準直拋物面鏡2,經過拋物面鏡2反射而出的光源成為平行光,此平行光入射至反射鏡3,再被反射面鏡3反射進入待測鏡頭,然後聚焦成像。
我們可經由顯微鏡系統觀察其成像,此時,顯微鏡利用偵測器偵測光源成像的光亮度和分佈圖,經過計算轉換,即可得到MTF值。
Infinite-Conjugate量測架構圖示--
我們以圖示再做一次說明。
狹縫光源位於離軸拋物面鏡的焦點上,狹縫光源將光入射至小的反射鏡(M1),然後反射到離軸的拋物面反射鏡(M2),經由此離軸拋物面鏡反射後之光源為平行光,再反射到大的平面反射鏡(M3),光源通過待測鏡頭,成像到顯微物鏡上,之後,利用光偵測器偵測光訊號強度,再經過一些數學計算得到MTF值。
2-2Two-FiniteConjugate
Two-FiniteConjugate量測架構--
現在我們再來看有限共軛系統(2-finiteConjugate)的架構是如何安排的呢?
狹縫光源入射至待測鏡頭,此時之狹縫光源為一個發散光源,並沒有經過拋物面鏡,所以入射至鏡頭之狹縫光源為發散之線光源,而非平行光源。
此狹縫光源與鏡頭之間的距離必須依照設計值而安排。
狹縫光源通過鏡頭之後成像,再經由顯微物鏡放大倍率成像於CCD光偵測器上。
我們以CCD偵測器偵測光訊號強度,經過電腦的公式轉換運算,即可得到MTF值。
Two-FiniteConjugate量測架構圖示--
我們以圖示來做說明。
光源入射至待測鏡頭,然後經過CCD偵測器偵測成像之光訊號,經過取像與電腦程式運算,測得MTF值。
但為了測試不同視場之MTF值,量測人員會將光源移動。
比方說,要測試1-field最大視場角之MTF值,便需要將光源移到圖中所示1-field位置處,然後待測鏡頭以能接收到的光源來做光亮度的偵測,經過取像與電腦程式運算後求得1-field視場之MTF值。
第三章:
MTF量測考量
3-1狹縫寬度選取
MTF量測儀之狹縫光源模組--
在進行MTF量測的時候,有幾個地方需要特別考量,比方說狹縫光源的狹縫寬度選取,還有光學架構的安排,MTF量測的正確性和影響MTF量測值的差異性也都必須注意。
現在我們一一來看。
這是一個MTF量測儀的狹縫光源模組。
在前方的位置有一個旋轉盤的機制,利用旋轉選取不同寬度的狹縫光源。
後方的濾波片置放架則可放置藍光、紅光或綠光的濾波片。
光源透過聚光鏡組將光發散或聚焦以增強或減弱量測MTF值之光亮度。
狹縫寬度之計算方法--
狹縫寬度的選取是根據計算而來的,此表僅供參考,基本上,系統會幫我們計算出最適合的狹縫寬度,我們只需要依照所建議的選取即可。
但是為什麼需要知道狹縫寬度呢?
因為我們必須確保光源的寬度要足夠小,才可被看成是狹縫光源。
這張表是擷取自儀器操作手冊的資料。
對於2-finiteConjugate有限共軛系統,影響狹縫光源寬度選取的參數有:
物距(L1)、像距(L2)、顯微物鏡放大倍率(M),狹縫寬度之單位是um。
狹縫寬度的選取必須小於(20/M)*(L1/L2)才可算是狹縫光源。
由公式可看出狹縫光源距離待測鏡頭愈近,狹縫寬度的要求就愈細,才能符合狹縫光源的要求。
對於InfiniteConjugate無窮共軛系統而言,狹縫寬度必須小於fc除以ft乘以20除以M。
其中,fc是離軸拋物面鏡的有效焦距,ft為待測鏡頭的有效焦距,M為顯微物鏡的放大倍率。
3-2光學架構
光學架構之安排--
剛剛我們提到了基本的三種光學架構安排考量,分別是:
無窮共軛系統、有限共軛系統和無焦系統。
除此之外,在進行MTF量測時,量測人員必須依據鏡頭的光學設計來安排其他相關元件位置的擺放,以符合光學設計的光路架構需求。
以圖A:
投影機鏡頭為例。
光源從LCDpanel,經過聚焦鏡片,在通過濾波片和X-Cube之後,從投影機鏡頭投射出來。
濾波片和X-Cube以及LCD面板均為進行光學鏡頭設計時所包含在內的光學元件。
鏡頭至LCDpanel成像處所經路徑之各項元件均屬於成像元件,所以量測時必須同時安排置放這些元件,才不會造成不正確之MTF量測。
缺其中任何一個光學元件均會使MTF量測值大幅降低。
從圖上我們可以看出所有光學元件都很對稱地通過光軸,這種架構就稱為On-Axis架構,而該光學成像就稱為On-AxisImage。
在On-AxisImage中,由中心點到A點的距離就是設計值中的1-field距離。
如果光學元件的中心軸並沒有在光軸上,那我們稱這種架構為Off-Axis的架構,它所呈現的影像就叫Off-AxisImage,由B點到A點的距離就是設計值中的1-field距離。
從畫面上我們可以看出上下圖之間的差異。
在下面的圖B當中,LCD面板位於系統光軸的下方,x-Cube也置放於光軸偏下方之位置,此為典型的off-axis(離軸)光學架構安排。
在進行MTF量測時,我們也必須依照光學設計去安排這些光學元件,才能符合離軸光學系統之MTF量測需求。
3-3正確量測之考量因素
MTF量測是否正確,有幾個注意事項:
第一個是必須依照MTF量測儀之要求,輸入正確的光學規格需求,例如鏡頭的有效焦距、F-number、波長、選取之狹縫寬度、物像距、視場角、物高、像高,還有主要空間頻率,尤其是空間頻率,因為我們需根據此空間頻率找到最佳的成像位置。
第二個注意事項是在量測時,必須依據待測鏡頭的光學設計架構來安排量測的光學架構,將所有設計時的光學元件全部置放上去。
第三個是夾治具的製作。
因為不同的鏡頭所要求的夾治具也不一樣,在設計夾治具時,必須考慮光源到成像面的各個光學元件,避免擋住光線,造成錯誤的量測。
最後一個是光學量測架構之光路調校,也是MTF量測時需特別注意的。
3-4影響量測值的因素
影響MTF量測值的差異性有哪些因素呢?
第一個是MTF之計算模型,不同的計算類型會產生不同的結果;其次,因為不同系統對濾波片的頻寬要求不同,MTF量測值也會有所差異;還有成像位置選取和成像面的傾斜度也會對MTF量測值產生影響,比方說垂直於光軸的成像面和傾斜於光軸的成像面所量測出來的MTF值就不一樣。
第四章:
量測分析vs.量測結果
4-1ThroughFocus之MTF量測
MTF量測結果--
我們以某鏡頭的TangentialMTF值和SagittalMTF值來解釋其量測結果。
先看TangentialMTF值的這張圖表,橫座標為空間頻率,縱座標為MTF值,不同顏色的曲線代表不同的視場。
以零視場的這條曲線來看,在100lp/mm時,MTF值為0.5;但最大視場,也就是1視場的這條曲線,則可看出在100lp/mm時,MTF值已經降到0.1以下。
但在Sagittal方向的最大視場表現的還不錯,在100lp/mm時,仍有0.3以上的MTF值。
從這兩張圖我們可以得到一個結論,就是該鏡頭的Sagittal方向表現的要比Tangential方向還要好。
ThroughFocus之MTF量測結果--
這張圖是記錄了不同視場下的ThroughFocusMTF值,同時包含Tangential與Sagittal方向。
在記錄時,量測人員會將鏡頭前後移動,然後記錄每一個位置點的MTF值。
以這張圖來看,MTF值較高的曲線大都集中在-0.03um的位置,所以這個位置的MTF值最好;換句話說,就是該鏡頭的最佳成像位置。
相對的,我們也可以從這張圖知道不同視場的不同成像位置,而去推斷場曲的變化。
4-2Distortion(畸變)之量測
鏡頭之DISTORTION量測--
畸變是不需要儀器也能用肉眼直接觀察的一種像差現象,比方說,電視的畫面成像是否扭曲,投影機投射出來的影像是否變形。
那要如何知道畸變的程度呢?
首先,從中心點到影像最外圍頂點的距離我們稱它為m,從中心點到理想方格的頂點的距離為G,畸變的程度計算就是將m減去G除以G,再乘上百分比所得到的結果。
畸變分為兩種,針形畸變和桶形畸變。
針形畸變的計算結果是正的,桶形畸變所得的結果則是負的。
此計算畸變之方式為針對鏡頭設計者而言。
鏡頭之DISTORTION量測結果--
圖A是某鏡頭在廣角和望遠的不同視場下的畸變測量結果,我們將這些數據記錄畫出如圖B的圖表,橫座標為畸變程度,縱座標為視場高度,從圖表中便可清楚看出不同視場的畸變變化。
TV之Distortion量測--
之前所提到測量畸變程度的方法主要是提供給鏡頭設計人員設計用,但是對於電視機、投影機等的畸變程度,我們有一個更快速的量測計算公式。
假設畸變形狀的左右高度分別為V1和V2,上下寬度分別為H1和H2,而正常理想的方格長寬分別為X和Y。
從這些數據,我們可以計算垂直方向的畸變程度,就是V1加上V2、除以2、減去Y、再除以Y、乘上百分比得到的結果。
同理,依照公式也可計算出水平方向畸變的畸變百分比為(H1+H2)/2減去X,再除以x、乘上百分比即可得到量測結果。
4-3橫向色差之量測
橫向色差--
何謂橫向色差?
當白光射入鏡頭,由於折射能力的不同,紅光、藍光、綠光的成像位置會落在不同的地方。
以這張圖來看,紅光落在綠光之上,因此,紅光和綠光的橫向色差就是紅光位置減去綠光位置所得到的結果。
橫向色差之量測結果--
我們以藍光和紅光的橫向色差做例子。
首先,將不同視場的色差值記錄下來,如表一。
再將這些數據化成曲線圖。
從曲線圖中我們可看到在零視場時,紅光和藍光已經有3um的橫向色差,所以我們可以推測鏡頭有可能沒有置放好。
總而言之,橫向色差的量測,就是分別紀錄R、G、B的成像點位置,再計算其成像位置差異即可。
 升级会员
升级会员 