ABB机器人程序指令汇总.docx
《ABB机器人程序指令汇总.docx》由会员分享,可在线阅读,更多相关《ABB机器人程序指令汇总.docx(6页珍藏版)》请在冰豆网上搜索。
ABB机器人程序指令汇总
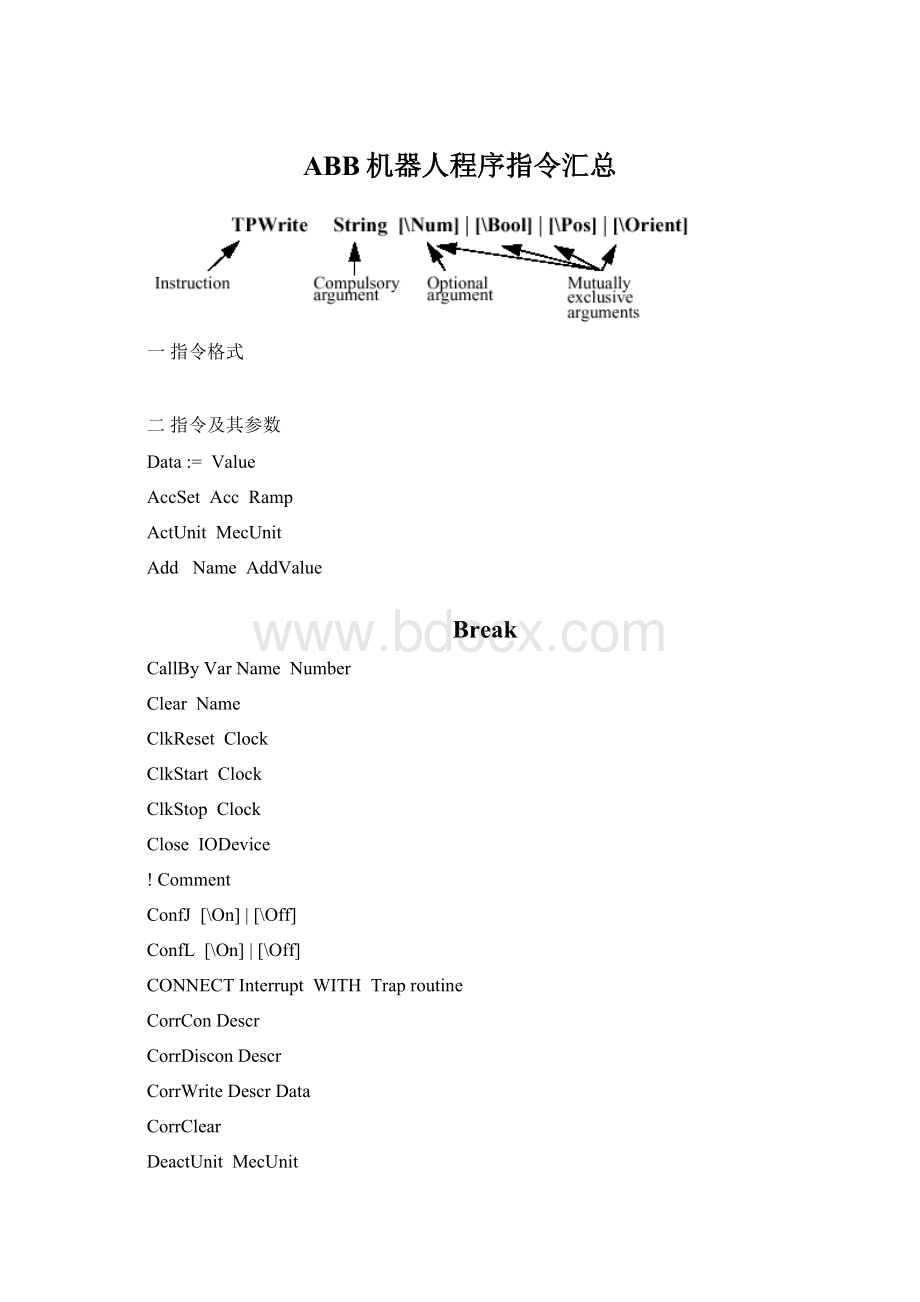
一指令格式
二指令及其参数
Data:
=Value
AccSetAccRamp
ActUnitMecUnit
AddNameAddValue
Break
CallByVarNameNumber
ClearName
ClkResetClock
ClkStartClock
ClkStopClock
CloseIODevice
!
Comment
ConfJ[\On]|[\Off]
ConfL[\On]|[\Off]
CONNECTInterruptWITHTraproutine
CorrConDescr
CorrDisconDescr
CorrWriteDescrData
CorrClear
DeactUnitMecUnit
DecrName
EOffsSetEaxOffsErrWrite[\W]HeaderReason
[\RL2][\RL3][\RL4]
Exit
ExitCycle
FORLoopcounterFROMStartvalueTOEndvalue
[STEPStepvalue]DO...ENDFOR
GOTOLabel
GripLoadLoad
IDeleteInterrupt
IFCondition...
IFConditionTHEN...
{ELSEIFConditionTHEN...}
[ELSE...]
ENDIF
IncrName
IndAMoveMecUnitAxis[\ToAbsPos]|[\ToAbsNum]Speed[\Ramp]
IndCMoveMecUnitAxisSpeed[\Ramp]
IndDMoveMecUnitAxisDeltaSpeed[\Ramp]
IndResetMecUnitAxis[\RefPos]|[\RefNum]|[\Short]|[\Fwd]|[\Bwd]|[\Old]
IndRMoveMecUnitAxis[\ToRelPos]|[\ToRelNum]|[\Short]|[\Fwd]|[\Bwd]Speed[\Ramp]
InvertDOSignal
IODisableUnitNameMaxTime
IOEnableUnitNameMaxTime
ISignalDI[\Single]SignalTriggValueInterrupt
ISignalDO[\Single]SignalTriggValueInterrupt
ISleepInterruptITimer[\Single]TimeInterrupt
IVarValueVarNoValue,Interrupt
IWatchInterrupt
Label:
MoveAbsJ[\Conc]ToJointPosSpeed[\V]|[\T]Zone[\Z]Tool
[\WObj]
MoveC[\Conc]CirPointToPointSpeed[\V]|[\T]Zone[\Z]Tool[
\WObj]
MoveJ[\Conc]ToPointSpeed[\V]|[\T]Zone[\Z]Tool[\WObj]
MoveL[\Conc]ToPointSpeed[\V]|[\T]Zone[\Z]Tool[\WObj]
OpenObject[\File]IODevice[\Read]|[\Write]|[\Append]|[\Bin]
PathResolValue
PDispOn[\Rot][\ExeP]ProgPointTool[\WObj]
PDispSetDispFrame
PulseDO[\PLength]Signal
RAISE[Errorno]
ResetSignal
RETURN[Returnvalue]
RewindIODevice
SearchC[\Stop]|[\PStop]|[\Sup]SignalSearchPointCirPoint
ToPointSpeed[\V]|[\T]Tool[\WObj]
SearchL[\Stop]|[\PStop]|[\Sup]SignalSearchPointToPoint
Speed[\V]|[\T]Tool[\WObj]
SetSignal
SetAOSignalValueSetDO[\SDelay]SignalValue
SetGOSignalValue
SingArea[\Wrist]|[\Arm]|[\Off]
SoftActAxisSoftness[\Ramp]
Stop[\NoRegain]
TESTTestdata{CASETestvalue{,Testvalue}:
...}
[DEFAULT:
...]ENDTEST
TPReadFKAnswerStringFK1FK2FK3FK4FK5[\MaxTime]
[\DIBreak][\BreakFlag]
TPReadNumAnswerString[\MaxTime][\DIBreak][\BreakFlag]
TPShowWindow
TPWriteString[\Num]|[\Bool]|[\Pos]|[\Orient]
TriggCCirPointToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]
ZoneTool[\WObj]
TriggIntTriggDataDistance[\Start]|[\Time]Interrupt
TriggIOTriggDataDistance[\Start]|[\Time][\DOp]|[\GOp]
|[\AOp]SetValue[\DODelay]|[\AORamp]
TriggJToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]ZoneTool[\WObj]
TriggLToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]ZoneTool[\WObj]
TuneServoMecUnitAxisTuneValue
TuneServoMecUnitAxisTuneValue[\Type]
UnLoadFilePath[\File]
VelSetOverrideMax
WaitDISignalValue[\MaxTime][\TimeFlag]
WaitDOSignalValue[\MaxTime][\TimeFlag]
WaitTime[\InPos]TimeWaitUntil[\InPos]Cond[\MaxTime][\TimeFlag]
WHILEConditionDO...ENDWHILE
WriteIODeviceString[\Num]|[\Bool]|[\Pos]|[\Orient][\NoNewLine]
WriteBinIODeviceBufferNChar
WriteStrBinIODeviceStr
WZBoxDef[\Inside]|[\Outside]ShapeLowPointHighPoint
WZCylDef[\Inside]|[\Outside]ShapeCentrePointRadius
WZDisableWorldZone
WZDOSet[\Temp]|[\Stat]WorldZone[\Inside]|[\Before]
SignalSetValue
WZEnableWorldZone
WZFreeWorldZone
WZLimSup[\Temp]|[\Stat]WorldZoneShape
WZSphDef[\Inside]|[\Outside]ShapeCentrePointRadius
三函数及其参数
Abs(Input)
ACos(Value)
AOutput(Signal)
ArgName(Parameter)
ASin(Value)
ATan(Value)
ATan2(YX)
ByteToStr(ByteData[\Hex]|[\Okt]|[\Bin]|[\Char])
ClkRead(Clock)CorrRead
Cos(Angle)
CPos([Tool][\WObj])
CRobT([Tool][\WObj])
DefDFrame(OldP1OldP2OldP3NewP1NewP2NewP3)
DefFrame(NewP1NewP2NewP3[\Origin])
Dim(ArrParDimNo)
DOutput(Signal)
EulerZYX([\X]|[\Y]|[\Z]Rotation)
Exp(Exponent)
GOutput(Signal)
GetTime([\WDay]|[\Hour]|[\Min]|[\Sec])
IndInposMecUnitAxis
IndSpeedMecUnitAxis[\InSpeed]|[\ZeroSpeed]
IsPers(DatObj)
IsVar(DatObj)
MirPos(PointMirPlane[\WObj][\MirY])
NumToStr(ValDec[\Exp])
Offs(PointXOffsetYOffsetZOffset)
OrientZYX(ZAngleYAngleXAngle)
ORobT(OrgPoint[\InPDisp]|[\InEOffs])
PoseInv(Pose)
PoseMult(Pose1Pose2)
PoseVect(PosePos)
Pow(BaseExponent)Present(OptPar)
ReadBin(IODevice[\Time])
ReadMotor[\MecUnit]Axis
ReadNum(IODevice[\Time])
ReadStr(IODevice[\Time])
RelTool(PointDxDyDz[\Rx][\Ry][\Rz])
Round(Val[\Dec])
Sin(Angle)
Sqrt(Value)
StrFind(StrChPosSet[\NotInSet])
StrLen(Str)
StrMap(StrFromMapToMap)
StrMatch(StrChPosPattern)
StrMemb(StrChPosSet)
StrOrder(Str1Str2Order)
StrPart(StrChPosLen)
StrToByte(ConStr[\Hex]|[\Okt]|[\Bin]|[\Char])
StrToVal(StrVal)
Tan(Angle)
TestDI(Signal)
Trunc(Val[\Dec])
ValToStr(Val)
 升级会员
升级会员 