规律型点的坐标.docx
《规律型点的坐标.docx》由会员分享,可在线阅读,更多相关《规律型点的坐标.docx(13页珍藏版)》请在冰豆网上搜索。
规律型点的坐标
规律型:
点的坐标精选题37道
一.选择题(共17小题)
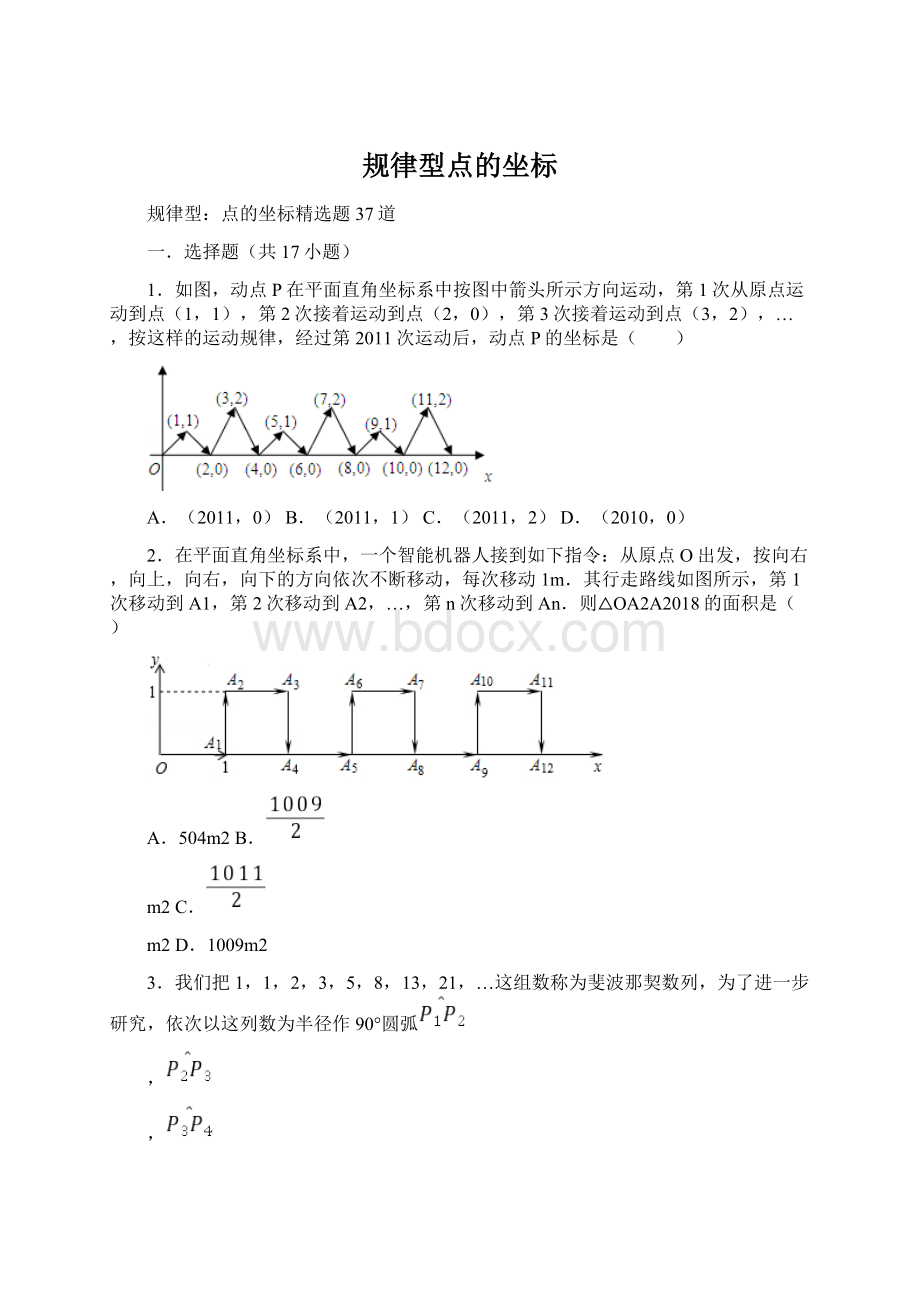
1.如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2011次运动后,动点P的坐标是( )
A.(2011,0)B.(2011,1)C.(2011,2)D.(2010,0)
2.在平面直角坐标系中,一个智能机器人接到如下指令:
从原点O出发,按向右,向上,向右,向下的方向依次不断移动,每次移动1m.其行走路线如图所示,第1次移动到A1,第2次移动到A2,…,第n次移动到An.则△OA2A2018的面积是( )
A.504m2B.
m2C.
m2D.1009m2
3.我们把1,1,2,3,5,8,13,21,…这组数称为斐波那契数列,为了进一步研究,依次以这列数为半径作90°圆弧
,
,
,…得到斐波那契螺旋线,然后顺次连结P1P2,P2P3,P3P4,…得到螺旋折线(如图),已知点P1(0,1),P2(﹣1,0),P3(0,﹣1),则该折线上的点P9的坐标为( )
A.(﹣6,24)B.(﹣6,25)C.(﹣5,24)D.(﹣5,25)
4.如图,所有正方形的中心均在坐标原点,且各边与x轴或y轴平行.从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A1,A2,A3,A4,…表示,则顶点A55的坐标是( )
A.(13,13)B.(﹣13,﹣13)C.(14,14)D.(﹣14,﹣14)
5.如图,在平面直角坐标系上有点A(1,0),点A第一次跳动至点A1(﹣1,1),第二次点A1跳动至点A2(2,1),第三次点A2跳动至点A3(﹣2,2),第四次点A3跳动至点A4(3,2),……依此规律跳动下去,则点A2017与点A2018之间的距离是( )
A.2017B.2018C.2019D.2020
6.如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),……,按这样的运动规律,经过第2019次运动后,动点P的坐标是( )
A.(2018,0)B.(2017,1)C.(2019,1)D.(2019,2)
7.如图,在一个单位面积为1的方格纸上,△A1A2A3,△A3A4A5,△A5A6A7,……是斜边在x轴上,且斜边长分别为2,4,6,……的等腰直角三角形.若△A1A2A3的顶点坐标分别为A1(2,0),A2(1,﹣1),A3(0,0),则依图中所示规律,点A2019的横坐标为( )
A.1010B.﹣1010C.1008D.﹣1008
8.如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2020次运动后,动点P的坐标是( )
A.(2020,1)B.(2020,0)C.(2020,2)D.(2019,0)
9.如图所示在平面直角坐标系中,半径均为1个单位长度的半圆O1、O2、O3,……,组成一条平滑的曲线,点P从原点O出发沿这条曲线向右运动,速度为每秒
个单位长度,则第2019秒时,点P的坐标是( )
A.(2018,0)B.(2019,1)C.(2019,﹣1)D.(2020,0)
10.如图,在直角坐标系中,第一次将△OAB变换成△OA1B1,第二次将△OA1B1变换成△OA2B2,第三次将△OA2B2变换成△OA3B3,已知A(1,5)、A1(2,5)、A2(4,5)、A3(8,5)、B(2,0)、B1(4,0)、B2(8,0)、B3(16,0):
若按此规律,将△OAB进行n次变换,得到△OAnBn.推测An的坐标是( ),Bn的坐标是( )
A.(2n,5)(2n+1,0)B.(2n﹣1,5)(2n+1,0)
C.(2n,5)(2n,0)D.(2n+1,5)(2n+1,0)
11.如图,在直角坐标系中,已知点A(﹣3,0)、B(0,4),对△OAB连续作旋转变换,依次得到△1、△2、△3、△4、…,△16的直角顶点的坐标为( )
A.(60,0)B.(72,0)C.(67
,
)D.(79
,
)
12.如图,长方形BCDE的各边分别平行于x轴与y轴,物体甲和物体乙由点A(2,0)同时出发,沿长方形BCDE的边作环绕运动物体甲按逆时针方向以1个单位/秒匀速运动,物体乙按顺时针方向以2个单位/秒匀速运动,则两个物体运动后的第2019次相遇地点的坐标是( )
A.(1,﹣1)B.(2,0)C.(﹣1,1)D.(﹣1,﹣1)
13.如图,在平面直角坐标系xOy中,点P(1,0).点P第1次向上跳动1个单位至点P1(1,1),紧接着第2次向左跳动2个单位至点P2(﹣1,1),第3次向上跳动1个单位至点P3,第4次向右跳动3个单位至点P4,第5次又向上跳动1个单位至点P5,第6次向左跳动4个单位至点P6,….照此规律,点P第100次跳动至点P100的坐标是( )
A.(﹣26,50)B.(﹣25,50)C.(26,50)D.(25,50)
14.如图,Rt△ABC的两边OA,OB分别在x轴、y轴上,点O与原点重合,点A(﹣3,0),点B(0,3
),将Rt△AOB沿x轴向右翻滚,依次得到△1,△2,△3,…,则△2020的直角顶点的坐标为( )
A.(673,0)B.(6057+2019
,0)
C.(6057+2019
,
)D.(673,
)
15.如图,一个粒子在x轴上及第一象限内运动,第1次从(0,0)运动到(1,0),第2次从(1,0)运动到(2,0),第3次从(2,0)运动到(1,1),它接着按图中箭头所示的方向运动.则第2019次时运动到达的点为( )
A.(59,6)B.(59,5)C.(62,3)D.(62,2)
16.如图,在单位为1的方格纸上,△A1A2A3,△A3A4A5,△A5A6A7,…,都是斜边在x轴上,斜边长分别为2,4,6,…的等腰直角三角形,若△A1A2A3的顶点坐标分别为A1(2,0),A2(1,1),A3(0,0),则依图中所示规律,A2019的坐标为( )
A.(﹣1008,0)B.(﹣1006,0)C.(2,﹣504)D.(1,505)
17.如图,已知点A1的坐标为(0,1),点A2在x轴的正半轴上,且∠A1A2O=30°,过点A2作A2A3⊥A1A2,交y轴于点A3;过点A3作A3A4⊥A2A3,交x轴于点A4;过点A4作A4A5⊥A3A4,交y轴于点A5;……;按此规律进行下去,则点A2021的坐标为( )
A.(0,31011)B.(﹣31011,0)C.(0,31010)D.(﹣31010,0)
二.填空题(共17小题)
18.如图,在平面直角坐标系中,一动点从原点O出发,按向上,向右,向下,向右的方向不断地移动,每次移动一个单位,得到点A1(0,1),A2(1,1),A3(1,0),A4(2,0),…那么点A4n+1(n为自然数)的坐标为 (用n表示).
19.如图,在平面直角坐标系中,一动点从原点O出发,沿着箭头所示方向,每次移动1个单位,依次得到点P1(0,1),P2(1,1),P3(1,0),P4(1,﹣1),P5(2,﹣1),P6(2,0),…,则点P2017的坐标是 .
20.如图,已知A1(1,0)、A2(1,1)、A3(﹣1,1)、A4(﹣1,﹣1)、A5(2,﹣1)、….则点A2019的坐标为 .
21.如图,点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2019次运动后动点P的坐标是 .
22.在平面直角坐标系中,对于点P(x,y),我们把点P′(﹣y+1,x+1)叫作点P的伴随点.已知点A1的伴随点为A2,点A2的伴随点为A3,点A3的伴随点为A4,这样依次得到点A1,A2,A3,A4…,若点A1的坐标为(a,b),对于任意的正整数n,点An均在x轴上方,则a,b应满足的条件为 .
23.如图,以O(0,0)、A(2,0)为顶点作正△OAP1,以点P1和线段P1A的中点B为顶点作正△P1BP2,再以点P2和线段P2B的中点C为顶点作△P2CP3,…,如此继续下去,则第六个正三角形中,不在第五个正三角形上的顶点P6的坐标是 .
24.如图所示,在平面直角坐标系中,一动点从原点O出发,按向上,向右,向下,向右的方向不断移动,每移动一个单位,得到点A1(0,1)、A2(1,1)、A3(1,0)、A4(2,0),…,那么点A2015的坐标为 .
25.如图放置的△OAB1,△B1A1B2,△B2A2B3,…都是边长为1的等边三角形,点A在x轴上,点O,B1,B2,B3,…都在直线l上,则点A2019的坐标是 .
26.如图,动点P在平面直角坐标系中按图中箭头所示的方向运动,第1次从原点运动到(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过2017次运动后,动点P的坐标为 .
27.在平面直角坐标系xOy中,对于点P(x,y),我们把点P′(﹣y+1,x+1)叫做点P的伴随点.已知点A1的伴随点为A2,点A2的伴随点为A3,点A3的伴随点为A4,…,这样依次得点A1,A2,A3…,An,…若点A1的坐标为(3,1),则点A2019的坐标为 .
28.如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2018次运动后,动点P的坐标是 .
29.如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2015次运动后,动点P的坐标是 .
30.如图,在平面直角坐标系中,有若干个横坐标分别为整数的点,其顺序按图中“→”方向排列,如(1,0),(2,0),(2,1),(1,1),(1,2),(2,2)…根据这个规律,第2019个点的横坐标为 .
31.如图,在平面直角坐标内有点A0(1,0),点A0第一次跳动到点A1(﹣1,1),第二次点A1跳动到A2(2,1),第三次点A2跳动到A3(﹣2,2),第四次点A3跳动到A4(3,2),……依此规律动下去,则点A2018的坐标是 .
32.如图,在平面直角坐标系中,半径均为1个单位长度的半圆O1、O2、O3、…,组成一条平滑的曲线,点P从原点O出发沿这条曲线向右运动,速度为每秒
个单位长度,则第2019秒时,点P的坐标是 .
33.如图,已知等边△AOC的周长为3,作OD⊥AC于点D,在x轴上取点C1,使CC1=DC,以CC1为边作等边△A1CC1;作CD1⊥A1C1于点D1,在x轴上取点C2,使C1C2=D1C1,以C1C2为边作等边△A2C1C2;作C1D2⊥A2C2于点D2,在x轴上取点C3,使C2C3=D2C2,以C2C3为边作等边△A3C2C3;…,且点A,A1,A2,A3,…都在第一象限,如此下去,则等边△A2019C2018C2019的顶点A2019坐标为 .
34.在平面直角坐标系中,我们把横、纵坐标都是整数的点叫做整点.已知点A(0,4),点B是x轴正半轴上的整点,若△AOB内部(不包括边)的整点个数为3,则点B的横坐标的所有可能值是 .
三.解答题(共3小题)
35.如图,在直角坐标系中,第一次将△OAB变换成△OA1B1,第二次将△OA1B1变成△OA2B2,第三次将△OA2B2变成△OA3B3,已知A(1,5),A1(2,5),A2(4,5),A3(8,5);B(2,0),B1(4,0),B2(8,0),B3(16,0).
(1)观察每次变换前后三角形有何变化,找出规律.按此规律将△OA3B3变成△OA4B4,则A4的坐标是 ,B4的坐标是 .
(2)若按第
(1)题中找到的规律将△OAB进行n次变换,得到△OAnBn,比较每次变换中三角形顶点的坐标有何变化,找出规律,推测An的坐标是, ,Bn的坐标是 .
(3)判断△OAnBn的形状,并说明理由.
36.在直角坐标系中,我们把横,纵坐标都为整数的点叫敝整点,该坐标轴的单位长度为1cm,整点P从原点O出发,速度为1cm/s,且整点p作向上或向右运动(如图1所示).运动时间(s)与整点(个)的关系如下表:
整点P运动的时间(秒)
可以得到整点P的坐标
可以得到整点P的个数
1
(0,1)(1,0)
2
2
(0,2)(1,1)(2,0)
3
3
(0,3)(1,2)(2,1)(3,0)
4
…
…
…
根据上表的运动规律回答下列问题:
(1)当整点p从点O出发4s时,可以得到的整点的个数为 个;
(2)当整点p从点O出发8s时,在直角坐标系中描出可以得到的所有整点,并顺次连接这些整点;
(3)当整点P从点O出发 时,可以得到整点(16,4)的位置.
37.我们规定以下三种变换:
(1)f(a,b)=(﹣a,b).如:
f(1,3)=(﹣1,3);
(2)g(a,b)=(b,a).如:
g(1,3)=(3,1);
(3)h(a,b)=(﹣a,﹣b).如:
h(1,3)=(﹣1,﹣3).
按照以上变换有:
f(g(2,﹣3))=f(﹣3,2)=(3,2),
(1)求f(h(5,﹣3))的值.
(2)观察上面的变换你会发现若把(a,b)看成是平面内一个点的坐标,则每种变换对应一种对称方式,你能否仿照上述变换定义一种新的变换,且也满足上述规律.
 升级会员
升级会员 