变胞机构的自由度及形态变化分析.docx
《变胞机构的自由度及形态变化分析.docx》由会员分享,可在线阅读,更多相关《变胞机构的自由度及形态变化分析.docx(16页珍藏版)》请在冰豆网上搜索。
变胞机构的自由度及形态变化分析
变胞机构的自由度及形态变化分析
摘要:
综述了变胞机构自由度的计算方法和变胞过程的矩阵描述理论。
在自由度计算中运用了基于约束的螺旋求解法;在变胞过程的矩阵描述中介绍了邻接矩阵、变胞源机构与变胞子机构、变胞源矩阵与变胞子矩阵的概念,引入了变胞方程以及两条修正规则,阐明了矩阵法在变胞机构变胞过程中的应用过程,并通过实例分析了这两种理论。
关键词:
变胞;自由度;矩阵描述
0刖吕
机构是机器的组成部分,它将输入的运动或力由一种形式转化为另一种形式。
对于传统机构,其在运动和力的传递过程中有效构件数及自由度均不发生变化。
但近年来研究的一类新型机构,它们在一定条件下却可以改变自身的有效构件数或自由度,从而使得对于同一输入产生多种输岀,拓宽了机构的应用X围,这类机构称为变胞机构。
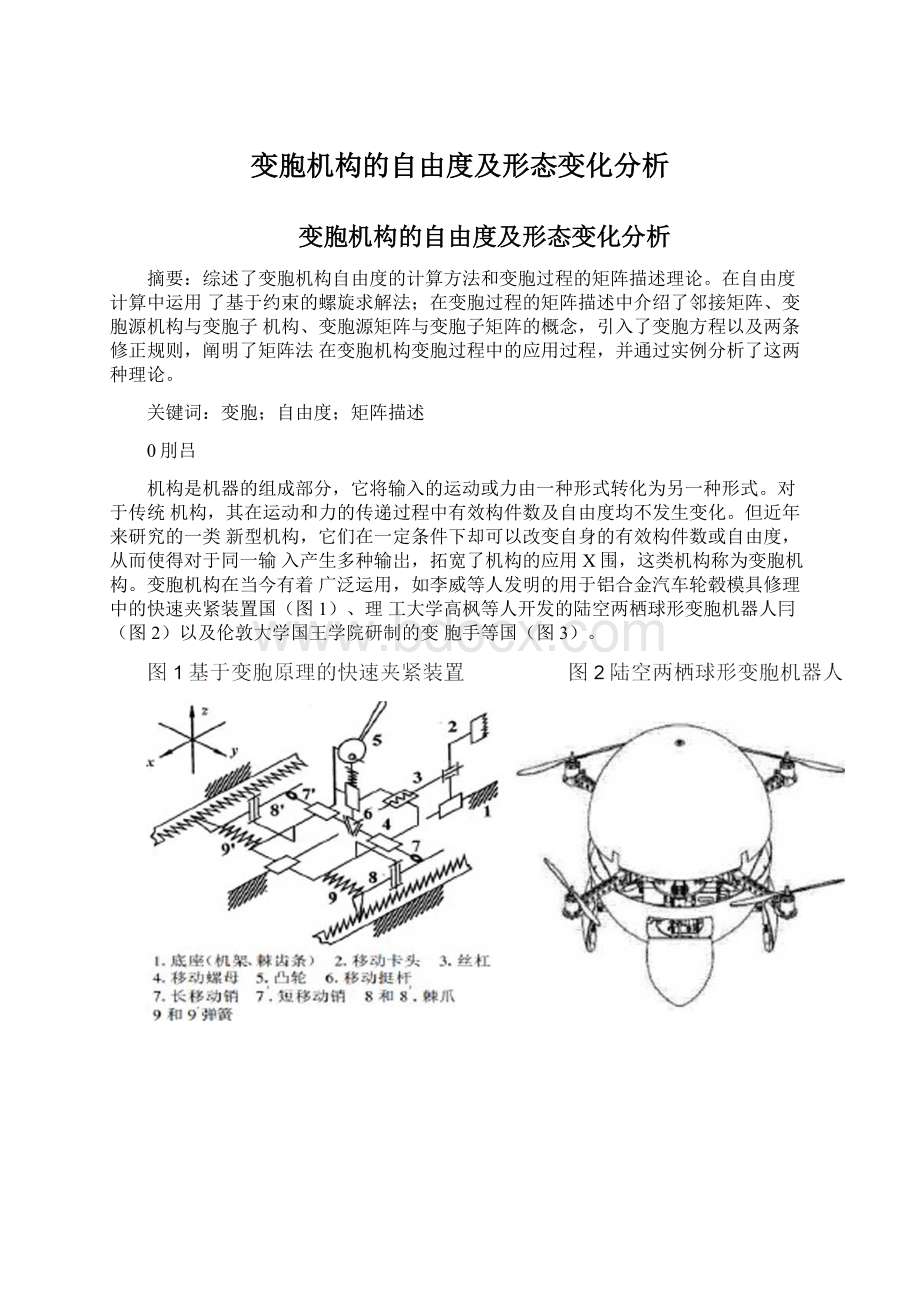
变胞机构在当今有着广泛运用,如李威等人发明的用于铝合金汽车轮毂模具修理中的快速夹紧装置国(图1)、理工大学高枫等人开发的陆空两栖球形变胞机器人冃(图2)以及伦敦大学国王学院研制的变胞手等国(图3)。
图3伦敦大学国王学院研制的变胞手
鉴于变胞机构的广阔应用前景,本文对变胞机构的有关理论进行了综述,主要包括变胞机构的自由度计算以及变胞机构的形态变化分析。
1变胞机构的自由度计算
常见的变胞机构大多为三维空间机构,对于空间机构自由度的计算,最简单有效的方法是约束螺旋求解法,计算公式为円:
M=〃("_g_l)+》/;+u-g(1.1)
r-1
这里M表示机构的自由度,〃表示机构的阶数(d=6-久,2表示机构的公共约束数),"表示包括机架的构件数目,g表示运动副的数目,表示第/个运动副的自由度,。
表示多环并联机构在去除公共约束因素后的冗余约束数目,g表示机构中存在的局部自由度。
图4所示是一共点球面五杆变胞机构⑸图中的数字1~5分别表示空间中的5根杆,$,•;
(i,j=1,2,3,4,5)表示连接第i根杆与第j根杆的转动副,5个转动副的轴线相交于球心0。
以。
为原点,x轴沿%,轴线,z轴沿竖直方向建立坐标系Oxyz,则5个转动副对应的螺旋可表示为:
$L5:
(100;000)
则相应地存在3个反螺旋:
00)$;:
(001;000)
$;:
(100;000)$;:
(010;0
从反螺旋可以看出,机构存在沿着三个方向的移动公共约束,即2=3,故机构属于
三阶螺旋系,此外。
=夕=0,由公式(1.1)计算自由度M=3x(5—5—l)+5=2。
在一定条件下,杆4与杆5可固连在一起,从而形成图5所示的共点球面四杆变胞机构,变胞后的4个转动副对应的螺旋可表示为:
$12:
(4耳C;000)$23:
(。
;b2c;;000)
$45:
(©45;000)$15:
(100;000)
易知变胞后的机构仍具有与变胞前机构相同的3个反螺旋$;、$;、$;,变胞后机构仍属于
三阶螺旋系,此外仍有u=g=0,自由度M=3x(4—4—l)+4=l
通过上述分析可以发现:
该球面变胞机构在变胞前后有效构件数和自由度均发生了变化。
2变胞机构变胞过程的矩阵描述
在研究变胞机构的特征时,一个重要的工具是邻接矩阵,其定义如下间:
其中,畀为构件的数目。
邻接矩阵中的每一行和每一列均对应一个构件,当构件i与构件丿•之间由运动副直接连接时,=djS=1;当构件i与构件丿•之间没有运动副直接连接时,4j=djj=0;对应构件与构件自身相连的矩阵元素被赋予零值,即当心丿•时,di}=0o
以图4为例,由于机构中具有5个构件,故邻接矩阵为5x5的方阵。
因为杆1与杆2、
杆2与杆3、杆3与杆4、杆4与杆5、杆5与杆1之间由转动副直接连接,故邻接矩阵中仏、〃2・】、“2.3、〃3・2、〃3・4、心.3、心.5、“5.4、“5.1、4.5均取匕其它元素取0,得到对应的邻接矩阵:
001
10
人)=°1
00
10
100
010
101
010
当机构发生变胞转化为图5所示的形态后,其对应的邻接矩阵变为:
0101
1010
A,"0101
1010
由于图5对应的球面四杆机构是由图4对应的球面五杆机构转化而来,因此我们称图5的球面五杆机构是变胞源机构,其对应的邻接矩阵人)是变胞源矩阵;而图4的球面四杆机构是变胞子机构,其对应的邻接矩阵是变胞子矩阵役显然,在球面五杆机构的基础上增加不同的连接关系将得到不同的变胞子机构(如将球面五杆机构中的杆1与杆3相连将得到图6所示的变胞子机构,其对应的邻接矩阵为:
_011_
1o1
110
它是不同于图5所示的球面四杆机构的)。
图6共点球面五杆变胞机构的另一种变胞子机构
变胞源矩阵与变胞子矩阵之间的转化关系可以用EU矩阵组来实现,即
Ai=(EjUij)A0(EjUjj)T(2.1)
式(2.1)称为变胞机构的变胞方程,用于描述变胞源矩阵到变胞子矩阵的变胞过程。
其中矩阵Uq用于将第j个构件上的连接关系转移到第i个构件上,矩阵d用于消去变胞合并后
的构件八前乘E/Aj表示对变胞源矩阵观进行行操作,后乘(EPiJ表示对变胞源矩阵血进行列操作同。
仍以图4到图5的变胞过程为例,当将杆4与杆5相连时,杆5与周围各杆的连接关系将被转移到杆4上,因此需要将变胞源矩阵4中第五行和第五列的元素对应加到第四行和第四列上,故
10
01
”4.5=°°
00
容易看出u45是将五阶单位矩阵的第五行加到第四行变化而来。
连接关系转移后,杆5将不复存在,因而需要将邻接矩阵中表示杆5连接关系的第五行和
第五列删除,故
00010
容易看出E,是在四阶单位矩阵中加入第五列全零列变化而来匚将匕鸟代入变胞方程(2.1)得:
_o1or
r1010
(E,U^ME5U45)t=010]
1012.
结果发现经过变胞方程计算得到的初步结果与变胞子矩阵人并不相等,差异在于矩阵中出现了除0、1以外的其它元素(即第四行第四列的元素2),出现这种情况的原因是杆5与杆4本来就是直接相连的,当进行£1/矩阵组计算时,连接关系的合并导致杆4与自身
连接关系的显化。
因此为了使得变胞方程成立,需要引入如下的修正规则冏:
修正规则I:
每进行一轮E〃矩阵组计算后,若邻接矩阵元素中岀现2,则将其全部以0覆盖。
经过修正规则I修正的结果将与变胞子矩阵A完全相同。
为了进一步完善变胞方程和加深对它的理解,再以图4到图6的变胞过程为例进行说明。
当将杆1与杆3相连时,杆3与周围各杆的连接关系将被转移到杆1上,因此需要将变胞源矩阵血中第三行和第三列的元素对应加到第一行和第一列上,故
容易看出〃口是将五阶单位矩阵的第三行加到第一行变化而来匚
连接关系转移后,杆3将不复存在,因而需要将邻接矩阵中表示杆3连接关系的第三行和第三列删除,故
1
0
0
0
0000_
1000
0010
0001.
容易看出E.是在四阶单位矩阵中加入第三列全零列变化而来。
将久3、耳代入变胞方程(2.1)得:
0211
r2000
(叽)心叽)7=[001
1010
oo1r
0000
1001
1010
计算后经过修正规则I修正的邻接矩阵中第二行和第二列的元素全为0,这是因为为了实现杆1与杆3的合并,杆2将与杆1、杆3连成一体,即杆2被杆1和杆3吞并。
因此为使得变胞方程成立,还需添加如下的修正规则:
修正规则II:
每进行一轮EU矩阵组计算后,若邻接矩阵中出现全零行和全零列,则将其删除。
再经过修正规则II修正的结果将与变胞子矩阵人完全相同。
当变胞机构出现连续多次变胞时,反复套用变胞方程以及两条修正规则,可以很好的贴合变胞过程,但要格外注育变胞过程中邻接矩阵的行列与构件的对应关系。
图7所示是一个礼物包装纸盒,若将其每一个折痕看作转动副,每一个面看作杆,它可
以转化为一个具有9个转动副和10根杆的空间机构其作为变胞源机构对应的变胞源矩
阵为:
对该机构连续进行4次变胞操作可得到4种不同形态的变胞子机构。
首先,将面2、3、4沿着折痕部分折叠并将面1和面10相固连可得到如图8所示的半
折叠纸盒,所对应的EU矩阵组为:
是将十阶单位矩阵的第十行加到第—行变化而来。
E®是在九阶单位矩阵中加入第十列全零列变化而来。
第一次变胞所得的变胞子矩阵为:
0
1
0
1
0
0
1
0
0_
<-面1
1
0
1
0
0
1
0
0
0
J面2
0
1
0
1
1
0
0
0
0
J面3
1
0
1
0
0
0
0
0
0
J面4
0
0
1
0
0
0
0
0
0
面5
0
1
0
0
0
0
0
1
0
<-面6
1
0
0
0
0
0
0
0
0
<-面7
0
0
0
0
0
1
0
0
1
<-面8
0
0
0
0
0
0
0
1
0_
<-面9
然后将面6沿着折痕折叠并将其与面5固连,所对应的E"矩阵组为:
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
是将九阶单位矩阵的第五行加到第六行变化而来匚
00
00
00
E5=
00
00
00
10
01
e5是在八阶单位矩阵中加入第五列全零列变化而来。
第二次变胞所得的变胞子矩阵为:
10
01
...T10
A=(^6.5)^1(£5^6.5)=八t
01010
10100
01100
o]面1
00000
00100
接着将面8沿着折痕折叠至物理极限位置并将面9与面4固连,所对应的EU矩阵组
为:
100
010
001
000
000
000
000
100
010
001
000
000
00
00
00
01
00
00
10
01
这里需要注意的是,u4g的作用是将面9与周围各面的连接关系转移到面4上,由于这一变换关系针对的是A所对应的变胞子矩阵,而在A所对应的变胞子矩阵中,面4对应第四
行,面9对应第八行,所以"刼是将八阶单位矩阵的第八行加到第四行变化而来。
00
10
01
00
00
00
00
00
00
00
10
01
00
00
00
00
00
00
00
10
01
仇的作用是将A中表示面9连接关系的第八行和第八列删除,所以化是在七阶单位矩阵中加入第八列全零列变化而来。
第三次变胞所得的变胞子矩阵为:
'0
1
0
1
0
1
r
<-面1
1
0
1
0
1
0
0
<-面2
0
1
0
1
1
0
0
<-面3
A=(丘04.9)£(E04J=
1
0
1
0
0
0
1
<-面4
0
1
1
0
0
0
1
J面6
1
0
0
0
0
0
0
<-面7
1
0
0
1
1
0
0_
<-面8
图9完全折叠的礼物包装纸盒
最后将面8与面7固连,可以得到如图9所示的六面体盒、所对应的E"矩阵组为:
U&7的作用是将面7与周围各面的连接关系转移到面8上,由于这一变换关系针对的是人所对应的变胞子矩阵,而在A•所对应的变胞子矩阵中,面7对应第六行,面8对应第七行,所以了是将七阶单位矩阵的第六行加到第七行变化而来。
_1
0
0
0
1
0
E7=
0
0
1
0
0
0
0
0
0
_0
0
0
0000
0000
0000
1000
0100
0001
&的作用是将中表示面7连接关系的第六行和第六列删除,所以&是在六阶单位矩阵中加入第六列全零列变化而来。
第四次变胞所得的变胞子矩阵为:
可以看出最终得到的变胞子矩阵人是符合图9所示的六面体盒各个面的连接关系的,即:
3总结
本文综述了变胞机构的自由度计算及变胞过程的矩阵描述理论,通过对一共点球面五杆变胞机构和一由礼物包装盒演化而来的变胞机构的实例分析说明了这两种理论的应用方法,为进一步研究变胞机构提供了一定的理论基础。
参考文献
[1]李威,等-一种新型变胞快速夹紧装置[〕]•机械设计与研究,2005,21
(2):
45-47.
[2]罗庆生,高枫等.一种基于变胞原理的陆空两栖球形变胞机器人[P]•理工大学,2014.
[3]JianS.Dai,DelunWang.Geometricanalysisandsynthesisofthenmetamorphicrobotichand[J].JournalofMechanicalDesign,2007,129:
1191-1197.
[4]黄真,等-高等空间机构学[M],:
高等教育,2006.
[5]JianS.Dai,JohnReesJones.Matrixrepresentationoftopologicalchangesinmetamorphicmechanisms[J].JournalofMechanicalDesign,2005,127:
837〜84Q
⑹郭宗和,马履中,杨启志.基于变胞原理的变自由度机构拓扑型分析[几中国机械工程,2005,16
(1):
1-3.
[7]王德伦,戴建生变胞机构及其综合的理论基础[几机械工程学报,2007,43⑻:
32-42.
⑻戴建生,丁希仑,邹彗君-变胞原理和变胞机构类型[〕]•机械工程学报,2005,41(6):
7-12.
[9]李端玲,戴建生,X启先,金国光.基于构态变换的变胞机构结构综合[几机械工程学报,2002,38(7):
12-16.
[10]J.S.Dai,J.ReesJones.Mobilityinmetamorphicmechanismsoffoldable/erectablekinds.In:
25"ASMEBiennialMechanismsandRoboticsConference,Baltimore,1998,New
 升级会员
升级会员 