中南大学机器人导论学在线测试3.docx
《中南大学机器人导论学在线测试3.docx》由会员分享,可在线阅读,更多相关《中南大学机器人导论学在线测试3.docx(30页珍藏版)》请在冰豆网上搜索。
中南大学机器人导论学在线测试3
窗体顶端
(一)单选题
1.
IML语言是一种()编程语言。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(A)
没有详解信息!
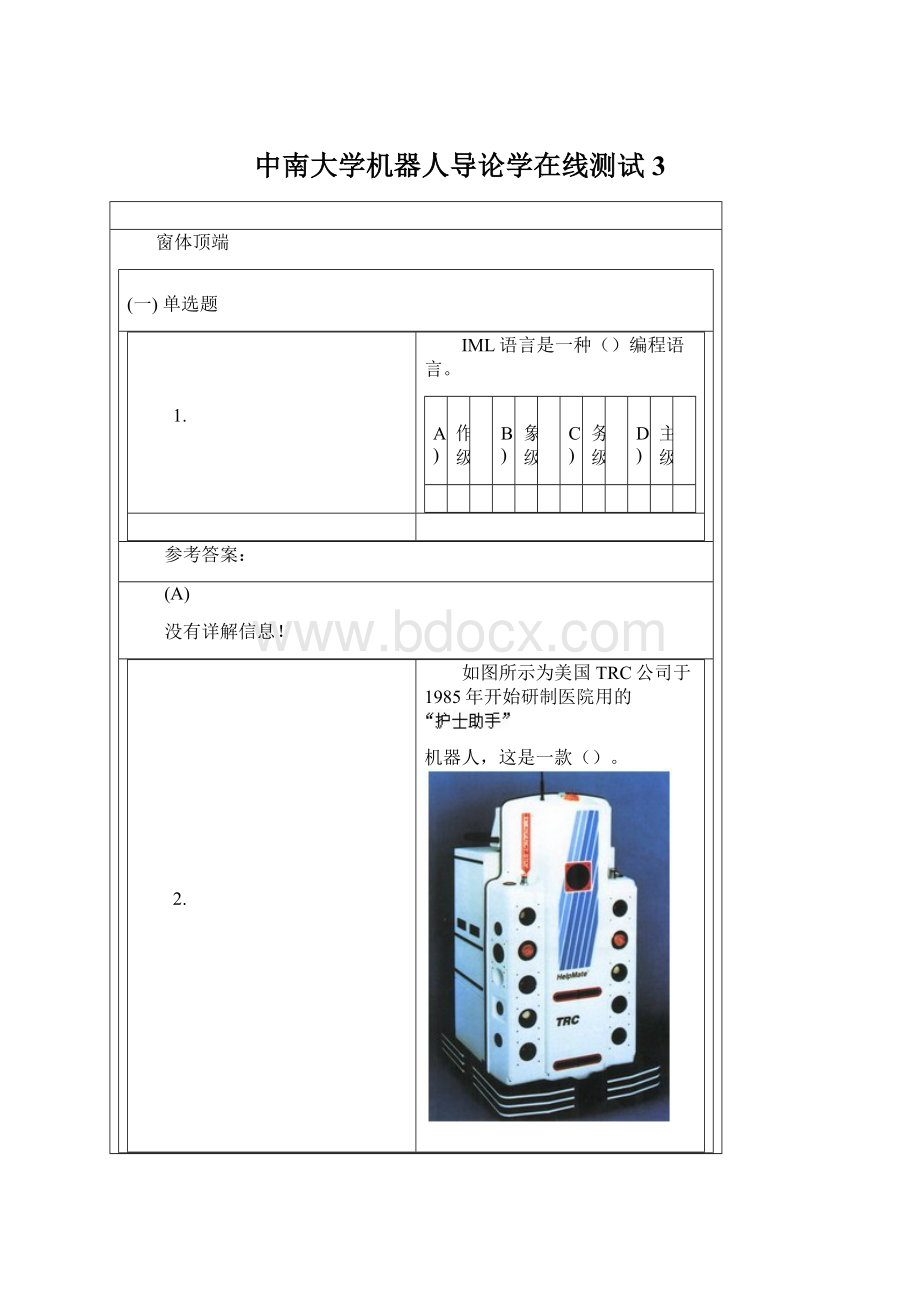
2.
如图所示为美国TRC公司于1985年开始研制医院用的
机器人,这是一款()。
(A)
工业机器人
(B)
军用机器人
(C)
服务机器人
(D)
仿人机器人
参考答案:
(C)
没有详解信息!
3.
RAPT语言是一种()编程语言。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(B)
没有详解信息!
4.
AUTOPASS语言是一种()编程语言。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(B)
没有详解信息!
5.
神经元建模时,如图所示的激发函数属于()。
(A)
极点型
(B)
阶跃型
(C)
线性型
(D)
S型
参考答案:
(D)
没有详解信息!
6.
BP神经网络最早是由()提出的。
(A)
McCulloch和Pitts
(B)
Hebb
(C)
Rumelhart
(D)
Hopfield
参考答案:
(C)
没有详解信息!
7.
VAL语言是由()开发的。
(A)
美国
(B)
日本
(C)
英国
(D)
意大利
参考答案:
(A)
没有详解信息!
8.
如图所示为日本本田公司研制的ASIMO机器人,这是一款()。
(A)
工业机器人
(B)
军用机器人
(C)
服务机器人
(D)
仿人机器人
参考答案:
(D)
没有详解信息!
9.
模糊理论是由()创立的。
(A)
G.Contor
(B)
B.Russell
(C)
L.A.Zadeh
(D)
E.H.Mamdani
参考答案:
(C)
没有详解信息!
10.
目前,()是技术上最成熟、应用最广泛的机器人。
(A)
工业机器人
(B)
探险机器人
(C)
服务机器人
(D)
仿人机器人
参考答案:
(B)
没有详解信息!
11.
RAPT语言是由()开发的。
(A)
美国
(B)
日本
(C)
英国
(D)
意大利
参考答案:
(C)
没有详解信息!
12.
AL语言是一种()编程语言。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(A)
没有详解信息!
13.
IML语言是由()开发的。
(A)
美国
(B)
日本
(C)
英国
(D)
意大利
参考答案:
(B)
没有详解信息!
14.
LUNA语言是一种()编程语言。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(A)
没有详解信息!
15.
SIGLA语言是由()开发的。
(A)
美国
(B)
日本
(C)
英国
(D)
意大利
参考答案:
(D)
没有详解信息!
16.
神经元建模时,如图所示的激发函数属于()。
(A)
极点型
(B)
阶跃型
(C)
线性型
(D)
S型
参考答案:
(C)
没有详解信息!
17.
人类从外界获得的信息最多的是来自于()。
(A)
视觉
(B)
听觉
(C)
触觉
(D)
味觉
参考答案:
(A)
没有详解信息!
18.
神经元建模时,如图所示的激发函数属于()。
(A)
极点型
(B)
阶跃型
(C)
线性型
(D)
S型
参考答案:
(B)
没有详解信息!
19.
如图所示为美国喷气推进实验室研制的
机器人,这是一款()。
(A)
工业机器人
(B)
军用机器人
(C)
探险机器人
(D)
仿人机器人
参考答案:
(C)
没有详解信息!
20.
反向传播模型神经网络简称()
(A)
BP网络
(B)
Hopfield网络
(C)
RBF网络
(D)
PCNN网络
参考答案:
(A)
没有详解信息!
(二)多选题
1.
工业机器人的应用准则包括以下几条()。
(A)
从恶劣工种开始采用机器人
(B)
在生产率和生产质量落后的部门应用机器人
(C)
要估计长远需要
(D)
机器人的投入和使用成本
参考答案:
(ABCD)
没有详解信息!
2.
在数字图像处理中,坐标变换常用于图像的()。
(A)
放大缩小
(B)
旋转
(C)
平滑
(D)
配准
参考答案:
(ABD)
没有详解信息!
3.
从描述操作命令的角度来看,机器人编程语言的水平可以分为()。
(A)
动作级
(B)
对象级
(C)
任务级
(D)
自主级
参考答案:
(ABC)
没有详解信息!
4.
神经元模型中,常见的激发函数有以下几种类型()。
(A)
极点型
(B)
阶跃型
(C)
线性型
(D)
S型
参考答案:
(BCD)
没有详解信息!
5.
模糊逻辑控制器由以下几个基本部分组成()。
(A)
模糊化
(B)
知识库
(C)
推理算法
(D)
逆模糊化
参考答案:
(ABCD)
没有详解信息!
6.
手把手示教编程的缺点主要有()。
(A)
只能在人所能达到的速度下工作
(B)
难与传感器的信息相配合
(C)
不能用于某些危险的情况
(D)
难获得高速度和直线运动
参考答案:
(ABCD)
没有详解信息!
7.
视觉信息的预处理主要包括()。
(A)
去噪
(B)
灰度变换
(C)
锐化
(D)
阈值分割
参考答案:
(ABC)
没有详解信息!
8.
为解决通用计算机上处理视觉信号的局限性,可以采用如下方案()。
(A)
采用一般的计算机进行处理
(B)
利用大型高速计算机组成通用的视频信号处理系统
(C)
小型高速阵列机
(D)
采用专用的视觉处理器
参考答案:
(BCD)
没有详解信息!
9.
神经网络系统通常具备以下特点()。
(A)
以大规模模拟并行处理为主,而不以串行离散数学符号处理为基础
(B)
具有较强的鲁棒性和容错性,能够进行联想、概括、类比和推广,任何局部的损伤不会影响整体结果
(C)
具有较强的自学习能力,系统可以通过不断的学习,不断地补充和完善自己的知识,这是传统的AI专家系统所望尘莫及的
(D)
是一个大规模自适应非线性动力学系统,具有集体运算的能力,这与线性系统具有本质上的不同
参考答案:
(ABCD)
没有详解信息!
10.
智能控制器的特点包括()。
(A)
具有分层信息处理和决策机构,它实际上是对人的神经结构或专家决策机构的一种模仿
(B)
具有非线性
(C)
具有变结构的特点
(D)
具有总体自寻优的特点
参考答案:
(ABCD)
没有详解信息!
11.
目前,在工业生产中应用的机器人的主要编程方式有以下几种形式()。
(A)
顺序控制的编程
(B)
示教方式变成(手把手示教)
(C)
示教盒示教
(D)
脱机编程或预编程
参考答案:
(ABCD)
没有详解信息!
12.
脱机编程有以下几个方面的优点()。
(A)
编程时可以不使用机器人,可腾出机器人去做其他工作
(B)
以前完成的过程或子程序可结合到待编的程序中去
(C)
可用传感器探测外部信息,从而使机器人做出相应的响应。
这种响应使机器人可以工作在自适应的方式下
(D)
可以预先运行程序来模拟实际运动,从而不会出现危险。
利用图形仿真技术,可以在屏幕上模拟机器人运动来辅助编程
参考答案:
(ABCD)
没有详解信息!
13.
常用的模糊集合的表示方法有()。
(A)
Zadeh表示法
(B)
序偶表示法
(C)
积分表示法
(D)
函数表示法
参考答案:
(ABCD)
没有详解信息!
14.
智能机器人应该具备以下几类机能()。
(A)
运动机能
(B)
感知机能
(C)
思维机能
(D)
人
参考答案:
(ABCD)
没有详解信息!
15.
视觉信息的处理过程主要包括以下几个模块()。
(A)
预处理
(B)
分割
(C)
特征抽取
(D)
识别
参考答案:
(ABCD)
没有详解信息!
16.
神经网络在控制系统中的作用主要包括()。
(A)
充当对象的模型
(B)
充当系统反馈
(C)
用作控制器
(D)
起优化计算的作用
参考答案:
(ACD)
没有详解信息!
17.
工业中最常用的机器人包括()。
(A)
喷涂机器人
(B)
焊接机器人
(C)
装配机器人
(D)
搬运机器人
参考答案:
(ABCD)
没有详解信息!
18.
在数字图像处理中,常用的二维正交变换有()。
(A)
FFT变换
(B)
Walsh变换
(C)
Haar变换
(D)
变换
参考答案:
(ABCD)
没有详解信息!
19.
为了模拟人脑信息处理机理,人工神经网络应具有以下基本属性()。
(A)
非线性
(B)
非局域性
(C)
非定常性
(D)
非凸性
参考答案:
(ABCD)
没有详解信息!
20.
机器人视觉系统的硬件由下述几个部分组成()。
(A)
景物和距离传感器
(B)
视频信号数字化设备
(C)
视频信号快速处理器
(D)
计算机及其外设
参考答案:
(ABCD)
没有详解信息!
(三)判断题
1.
LUNA语言具有与ALGOL相似的语法,它是在ALGOL语言基础上开发出来的。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
2.
中值滤波是一种线性滤波器。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
3.
当图像亮度的动态范围很小时,通过直方图拉伸处理可以使图像的层次增多,达到图像细节增强的目的。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
4.
RAPT语言是英国爱丁堡大学开发的实验用机器人语言,它的语法基础来源于著名的数控语言APT。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
5.
由Unimation公司开发的AL语言对其他语言有很大的影响,在一般机器人语言中起主导作用。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
6.
智能控制系统是一门边缘交叉学科,它需要更多的相关学科配合,使控制系统得到更大的发展。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
7.
机器人的视觉与文字识别或图像识别是有区别的,它们的区别在于机器人视觉系统需要处理三维图像,不仅需要了解物体的大小、形状,还要知道物体之间的关系。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
8.
LUNA语言是日本SONY公司开发用于控制SRX系列SCARA平面关节型机器人的一种特有的语言。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
9.
人类视觉细胞的数量大约在
数量级,是听觉细胞的3000多倍,是皮肤感觉细胞的100多倍。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
10.
简单的高通滤波是最常用的一种图像去噪方法。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
11.
脱机编程指用机器人程序语言预先进行程序设计,而不是用示教的方法编程。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
12.
锐化处理可以突出图像中的高频成分,使轮廓增强。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
13.
AL语言中有一个称为nilrot事先说明过的旋转,定义为
。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
14.
AUTOPASS是IBM公司属下的一个研究所提出来的机器人语言,它像给人的组装说明书一样,是针对所描述机器人操作的语言。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
15.
最简单的锐化处理办法是采用低通滤波器。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
16.
就工人的综合能力而言,目前机器人与人相比差距已经很小了。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
17.
手把手示教一般用于对大型机器人或危险作业条件下的机器人示教。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
18.
经典集合理论允许元素对集合的隶属度取为区间
之间的任意一个数值。
(A)
对
(B)
错
参考答案:
(B)
没有详解信息!
19.
预处理是视觉处理的第一步,其任务是对输入图像进行加工,消除噪声,改进图像的质量,为以后的处理创造条件。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
20.
示教盒示教难以获得高的控制精度,也难以与其他设备同步和与传感器信息相配合。
(A)
对
(B)
错
参考答案:
(A)
没有详解信息!
窗体底端
 升级会员
升级会员 