永磁无刷直流电机.docx
《永磁无刷直流电机.docx》由会员分享,可在线阅读,更多相关《永磁无刷直流电机.docx(8页珍藏版)》请在冰豆网上搜索。
永磁无刷直流电机
永磁无刷直流电机
1、简介
无刷直流电机(BrushlessDCMotor,以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
以其体积小、重量轻、效率高、惯量小和控制精度高等优点,同时还保留了普通直流电动机优良的机械特性,广泛应用于伺服控制、数控机床、机器人等领域。
近年来,随着无刷直流电机应用领域的不断扩大,各种控制算法和控制策略也相继出现.。
为了便于理论分析和验证各种控制算法和策略,建立正确的无刷直流电机模型就显得非常重要。
利用Matlab软件下的Simulink仿真工具,实现了对无刷直流电机控制系统的仿真,并给出了实例仿真结果。
鉴于以上原因,本文通过推导给出了无刷直流电机的数学模型,并借助Matlab建立了其仿真模型,通过仿真证明了该模型的正确性和合理性。
2、永磁无刷直流电机的构成
从广义的电机概念看,永磁无刷直流电机由三大部分组成:
电机本体、位置检测器、直---交无源逆变器。
若与原有直流电动机一一对应,则永磁体构成的转子与原直流电机的定子相对应,其作用是产生一个恒定的气隙磁场。
由位置检测器与逆变器一起构成一个电子换向器,取代原直流电动机的机械接触式换向装置。
控制系统是调速系统的组成部分。
3、永磁无刷直流电机的数学模型
假定无刷直流电机工作在二相导通星形三相六状态下,反电势波形是平顶宽度为120°电角度的梯形波.电机在工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称,电枢绕组在定子内表面均匀连续分布。
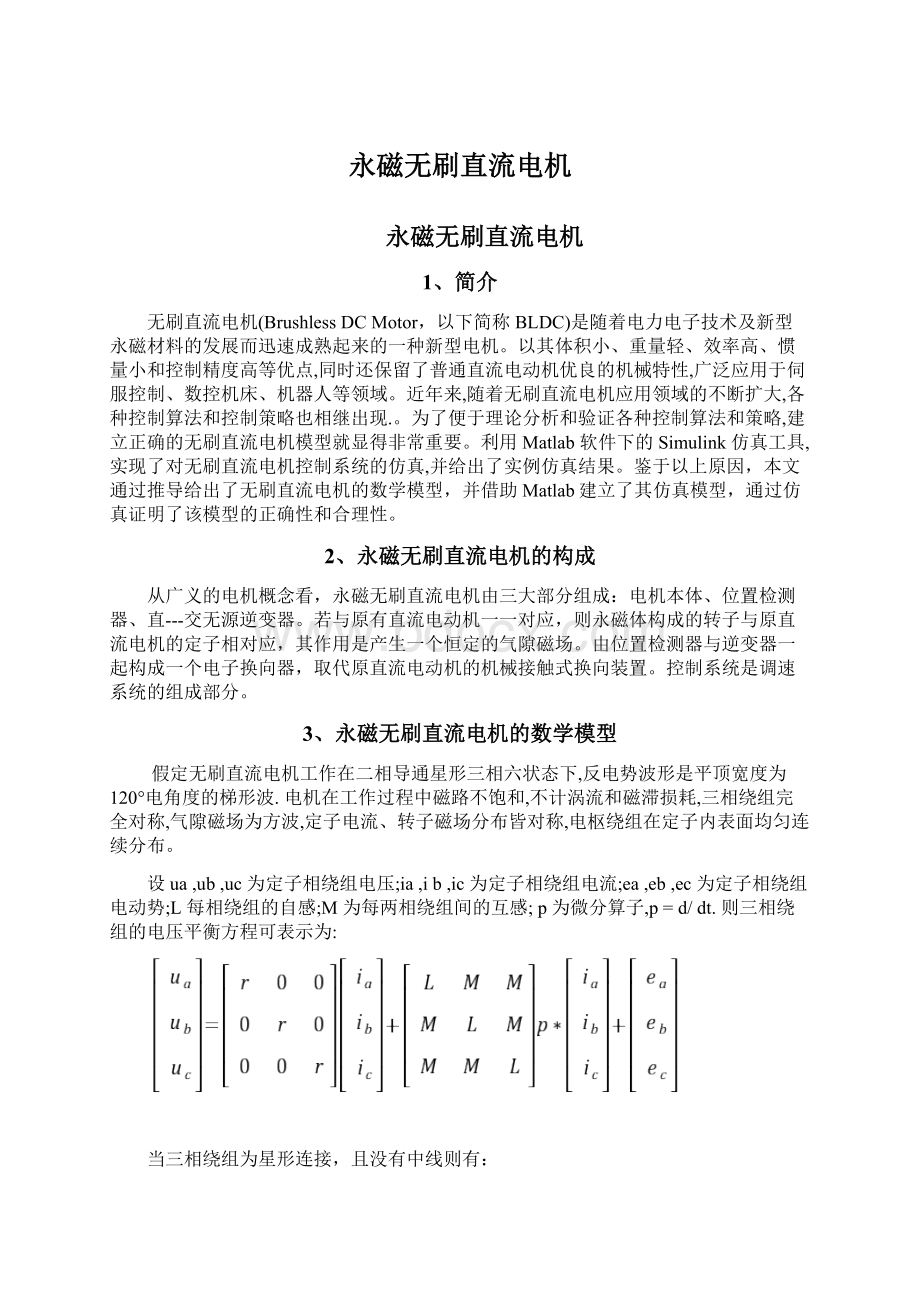
设ua,ub,uc为定子相绕组电压;ia,ib,ic为定子相绕组电流;ea,eb,ec为定子相绕组电动势;L每相绕组的自感;M为每两相绕组间的互感;p为微分算子,p=d/dt.则三相绕组的电压平衡方程可表示为:
当三相绕组为星形连接,且没有中线则有:
且
化简可得电压方程为:
电机的等效模型为
电磁转矩方程为:
机械运动方程式可表示为:
4、系统建模与仿真
根据永磁无刷直流电机的电压方程和等效电路,在Matlab的SIMULINK环境下,利用电力系统仿真模块中丰富的模块库,可建立如下图所示的永磁无刷直流电机模型。
该三相电机的额定运行工况为1kW,500V直流,3000r/min。
由六阶电压逆变器供电。
调速器用于控制直流母线电压。
逆变器的驱动信号由霍尔元件信号编码形成。
三相逆变器的输出电压施加于永磁块的定子绕组。
负载转矩初始值是0,在0.1s时突加负载转矩为11Nm。
两个控制回路被使用。
内部控制回路是在电动势改变时,同步改变逆变器的驱动信号。
外部控制回路采用转速闭环系统调速,转速环由PI调节器组成,转速跟随给定的参考值而变化,实现转速的调节。
1、电源和逆变器模块
电源采用Matlab中的受控电压电源模块,其值的大小与速度差值的PI输出成正比例关系。
由上图可见,该控制系统是一个有静差的闭环系统,系统在0.12s具有稳定输出,该直流输出电压作为逆变器的DC输入端。
逆变器采用多功能桥式电路模块,设置为MOSFET功率开关器件。
将电流调节PWM模块和逻辑模块逻辑与,就可以产生6路脉冲信号,控制MOSFET的开关器件的导通和关断,从而产生三相端电压输出。
该输出电压理想情况为标准正弦输出,比较实际输出电压可知该逆变器输出电压能很好的符合要求。
2、电机本体模块
永磁同步电动机模块可用于发电机模式和电动机模式。
运作方式是由机械转矩的符号描述的(正号代表电动机模式,符号代表发电机模式)该机器的电气和机械部分各由一个二阶状态空间模型描述。
正弦模型假定定子永磁体产生的磁通量为正弦波,这意味着所形成的电动势也是正弦波。
对于梯形模型,模型假定永磁体建立三个梯形反电动势波形。
3、速度控制模块
速度控制模块如上图所示,上输入为给定转速与实际转速的差值,通过一个限幅的PI调节器,输出参考电流幅值Is。
其中Kp为比例调节系数,Ki为积分调节系数,饱和限幅模块将输出的参考电流幅值限定在要求的范围内。
4、驱动控制模块
BLDCM控制系统中逆变器的可靠换相是通过BLDCM内部的转子位置信号进行控制的。
利用BLDCM的霍尔信号的位置和PWM来控制逆变器各功率开关导通。
驱动控制模块主要由解码器和门驱动信号生成模块组成。
其中解码器将霍尔信号转换为三相电动势信号,该电动势信号由三相组成,每相电动势信号有+1,-1,0三种取值,而三相电动势信号也包含了这三种取值。
其转换关系如下所示
驱动信号生成模块是利用三相电动势信号形成逆变器各功率开关的驱动信号,其转换关系是
其中Q1~Q6代表逆变器六个功率开关的导通状态,1代表导通,0代表开断。
每一时刻有两个功率开关导通,一个上桥臂导通一个下桥臂导通。
5、仿真结果
从仿真波形可以看出,在给定的参考转速下,系统响应快速而且平稳,相电流和反电动势波形较为理想。
系统空载起动时,电磁转矩在很短的时间内进入稳定状态,忽略系统的摩擦转矩,此时的电磁转矩均值为0。
t=0.1s时突加负载,转速突降,但很快又恢复到平衡状态,系统具有较强的抗干扰能力。
如图所示突加负载后,转速和电磁转矩有一定的脉动,这主要是由电流换向引起的。
仿真结果符合理论分析,表明该仿真系统具有良好的动态和静态响应。
转速波形
is_a与e_a的波形
电磁转矩波形
WelcomeTo
Download!
!
!
欢迎您的下载,资料仅供参考!
 升级会员
升级会员 