工业现场总线实验 1.docx
《工业现场总线实验 1.docx》由会员分享,可在线阅读,更多相关《工业现场总线实验 1.docx(21页珍藏版)》请在冰豆网上搜索。
工业现场总线实验1
组态软件仿真程序设计(3)
一、实验目的
(1)设计例程实现图形的移动控制和反复控制。
(2)加深对变量设计的理解。
二、实验设备
1、中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
三、实验步骤
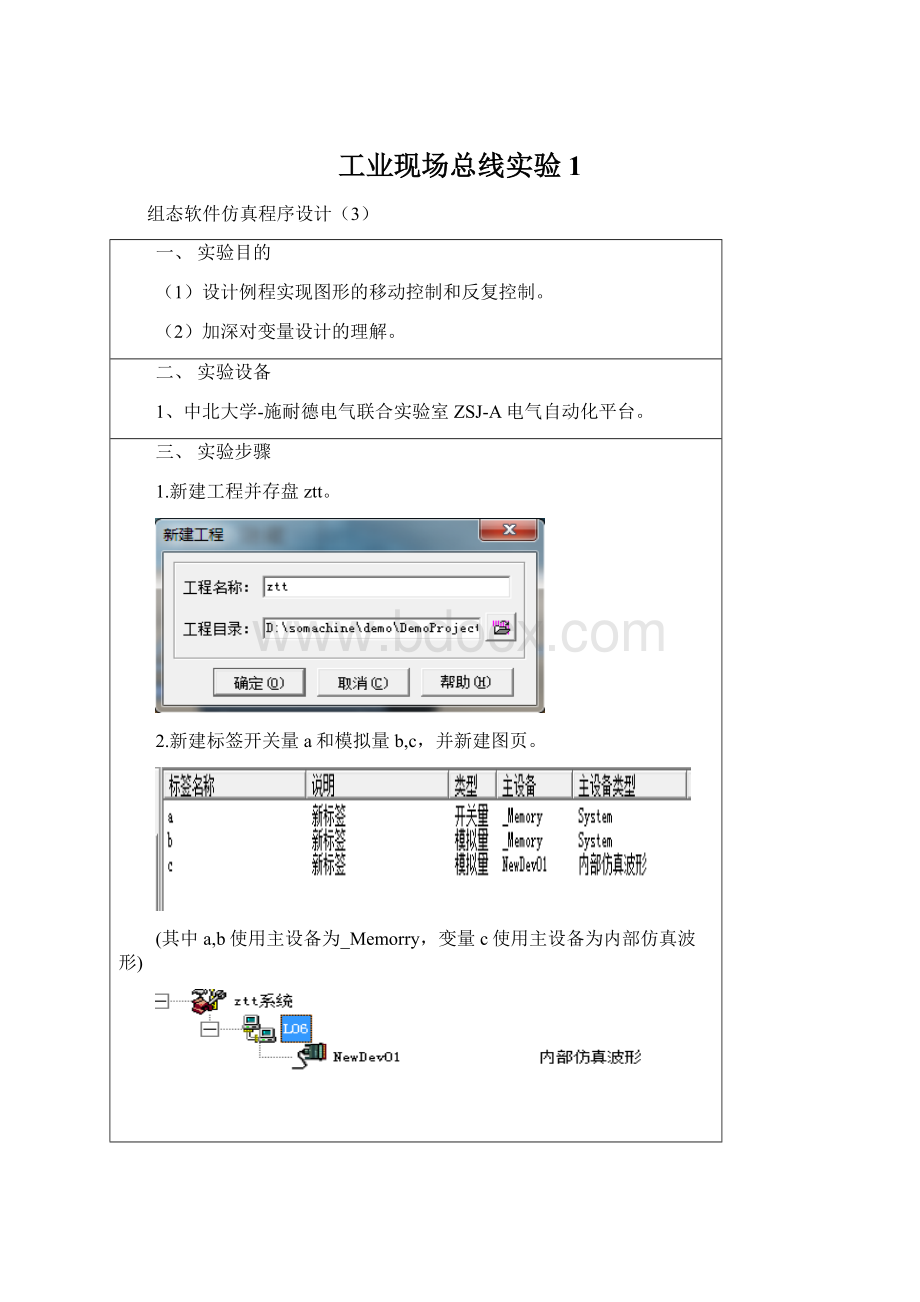
1.新建工程并存盘ztt。
2.新建标签开关量a和模拟量b,c,并新建图页。
(其中a,b使用主设备为_Memorry,变量c使用主设备为内部仿真波形)
3.用椭圆画小球模型,下置两个按钮控制其垂直移动,变量控制其水平反复移动,达到实验要求。
(1)垂直移动
(2)反复水平移动,变量控制如下截图:
四、实验结果
(1)垂直移动
a图为按下“上”按钮,小球位于最上面
b图为按下“下”按钮,小球位于最下面
(2)反复水平移动(可以反复移动)
a图小球位于最左端
b图小球位于最右端
五、思考小结
组态软件综合例程
一、实验目的
(1)运用前三节所学知识设计吃豆程序。
(2)了解部分编程语法并灵活运用变量。
二、实验设备
1、中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
三、实验步骤
1.新建工程并存盘ztt。
2.新建图页。
3.用扇形画嘴巴模型,新建变量move,变量dou,变量mou控制嘴巴位置移动,豆子可见性,嘴巴可见性。
初始界面如下:
4.运行模型,进行演示模式。
四、实验结果
(1)move变量扫描控制如下:
(2)部分演示截屏:
五、思考小结
图灵开物组态软件与M218的Modbus通信
一、实验目的
(1)巩固对M218PLC基本指令的Somachine编程软件的学习
(2)用图灵开物实现组态软件与M218交互性通信。
二、实验设备
1、中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
三、实验步骤
1.打开Somachine软件,使用空项目启动,
2.新建工程ztt并存盘,选择TM218LDAE24DRHN硬件配置。
3.创建POU,写简单PLC梯形图,分配I/O地址。
4.修改通信协议,在Somachine编程软件中串行线路1默认的通信协议是Somachie通信协议,串行线路2默认的通信协议是Modbus通信协议。
修改串行线路1通信协议,删除原有的通信协议并且添加新的Modbus通信协议。
5.编译通过后,与PLC通过编程电缆连接,将程序多重下载到TM218LDAE24DRHNPLC中。
(配置下载通讯路径,在PLC中介绍,不再重复)。
6.PC机通过485总线与平台相连,打开图灵开物,配置通信,与somachine中通信协议相同。
7.新建标签开关变量对应启动按钮1,启动按钮2,停止按钮。
创建图页,编写如下。
8.进入演示模式,看PLC是否能和组态软件进行通信。
四、实验结果
(1)按下turnonQ0,发现PLC面板Q0指示灯亮,用Q0的可见性表示PLC面板灯亮。
(2)按下turnonQ1,发现PLC面板Q1指示灯亮,用Q1的可见性表示PLC面板灯亮。
(3)按下turnoff,发现PLC面板指示灯全灭。
五、思考小结
力控组态软件与M218的通信
一、实验目的
(1)巩固对M218PLC基本指令的Somachine编程软件的学习
(2)用力控实现组态软件与M218交互性通信。
二、实验设备
1、中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
三、实验步骤
1.打开Somachine软件,使用空项目启动,
2.新建工程ztt并存盘,选择TM218LDAE24DRHN硬件配置。
3.创建POU,写简单PLC梯形图,分配I/O地址。
修改通信协议,删除原有的通信协议并且添加新的Modbus通信协议。
(上面已经详细介绍,不再重复说明)。
4.编译通过后,与PLC通过编程电缆连接,将程序多重下载到TM218LDAE24DRHNPLC中。
(配置下载通讯路径,在PLC中介绍,不再重复)。
5.PC机通过485总线与平台相连,打开力控
6.I/Omanager选择,配置通信,在这里我们采用两种通信方式modbus通信和PLC通信。
7.新建标签开关变量对应启动按钮1,启动按钮2,停止按钮。
创建图页,编写如下。
四、实验结果
(1)按下I0,发现PLC面板Q0指示灯亮,用球的可见性表示PLC面板灯亮。
(2)按下I1发现PLC面板Q1指示灯亮,用球的可见性表示PLC面板灯亮。
(3)按下I2,发现PLC面板指示灯全灭。
五、思考小结
图灵开物控制电机转动实验
一、实验目的
(1)巩固对M218PLC基本指令的Somachine编程软件的学习
(2)用图灵开物实现组态软件与M218交互性通信。
二、实验设备
1、中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
三、实验步骤
1.打开Somachine软件,使用空项目启动,
2.新建工程ztt并存盘,选择TM218LDAE24DRHN硬件配置。
3.创建POU,写简单PLC梯形图,分配I/O地址。
输入:
SBI:
ZhengzhuanI0(%IX0.0)电机正转按钮
SB2:
FanzhuanI1(%IX0.1)电机反转按钮
SB3:
StopI2(%IX0.2)电机停止按钮
输出:
Q4%QX0.4电机正转
Q5%QX0.5电机反转
4.修改通信协议,在Somachine编程软件中串行线路1默认的通信协议是Somachie通信协议,串行线路2默认的通信协议是Modbus通信协议。
修改串行线路1通信协议,删除原有的通信协议并且添加新的Modbus通信协议。
(截图不再显示)
5.编译通过后,与PLC通过编程电缆连接,将程序多重下载到TM218LDAE24DRHNPLC中。
(配置下载通讯路径,在PLC中介绍,不再重复)。
6.PC机通过485总线与平台相连,打开图灵开物,配置通信,与somachine中通信协议相同。
(截图不再显示)
7.新建标签开关变量对应电机正转按钮,电机反转按钮,电机停止按钮。
创建图页如下:
分别用灯的闪烁以及填充性控制电机正转,反转,以及停止。
8.进入演示模式,验证通信正确。
四、实验结果
按下正转按钮,电机转动,用球的填充性和闪烁表示电机正转。
此时球为红色闪烁,按下反转按钮,此时球为绿色闪烁,按下停止按钮,球不再闪烁,电机停止,功能实现完全。
五、思考小结
M218与触摸屏接口实验
一、实验目的
(1)巩固对M218基本指令和Somachine编程软件的学习。
(2)学会使用Vijeo—Designer触摸屏开发软件设计触摸屏界面。
(3)加深互锁与自锁的理解。
(4)学会使用触摸屏进行仿真。
二、实验设备
1.中北大学-施耐德电气联合实验室ZSJ-A电气自动化平台。
2.实验台配套通信线,跨接线若干。
三、实验步骤
1.新建工程,存盘ztt,硬件配置,本实验使用设备有M218和触摸屏,其中触摸屏的型号为HMIGXO3501。
2.在MyPou中编写电机正反转程序如下:
3.在Somachine编程软件中变量配置
4.变量导入
5.电机正反转控制触摸屏界面设计。
设计过程不再叙述,设计界面如下所示:
(ZTT为名字缩写)
6、配置驱动程序的设备地址
8程序下载。
下载之前先添加网关扫描设备,并将设备处于活动的状态。
9.界面显示。
四、实验结果
触摸屏输出结果如下(拍照所得):
五、思考小结
 升级会员
升级会员 