浙江省诸暨市牌头中学学年高二下学期期中考试技术试题.docx
《浙江省诸暨市牌头中学学年高二下学期期中考试技术试题.docx》由会员分享,可在线阅读,更多相关《浙江省诸暨市牌头中学学年高二下学期期中考试技术试题.docx(27页珍藏版)》请在冰豆网上搜索。
浙江省诸暨市牌头中学学年高二下学期期中考试技术试题
牌头中学2017学年第二学期中考技术试卷第一部分信息技术
(总分50分)
一、选择题(本大题共12小题,每小题2分,共24分。
在每小题给出的四个选项中,只有一个符合题目要求)选择题填涂在答题卡1-12
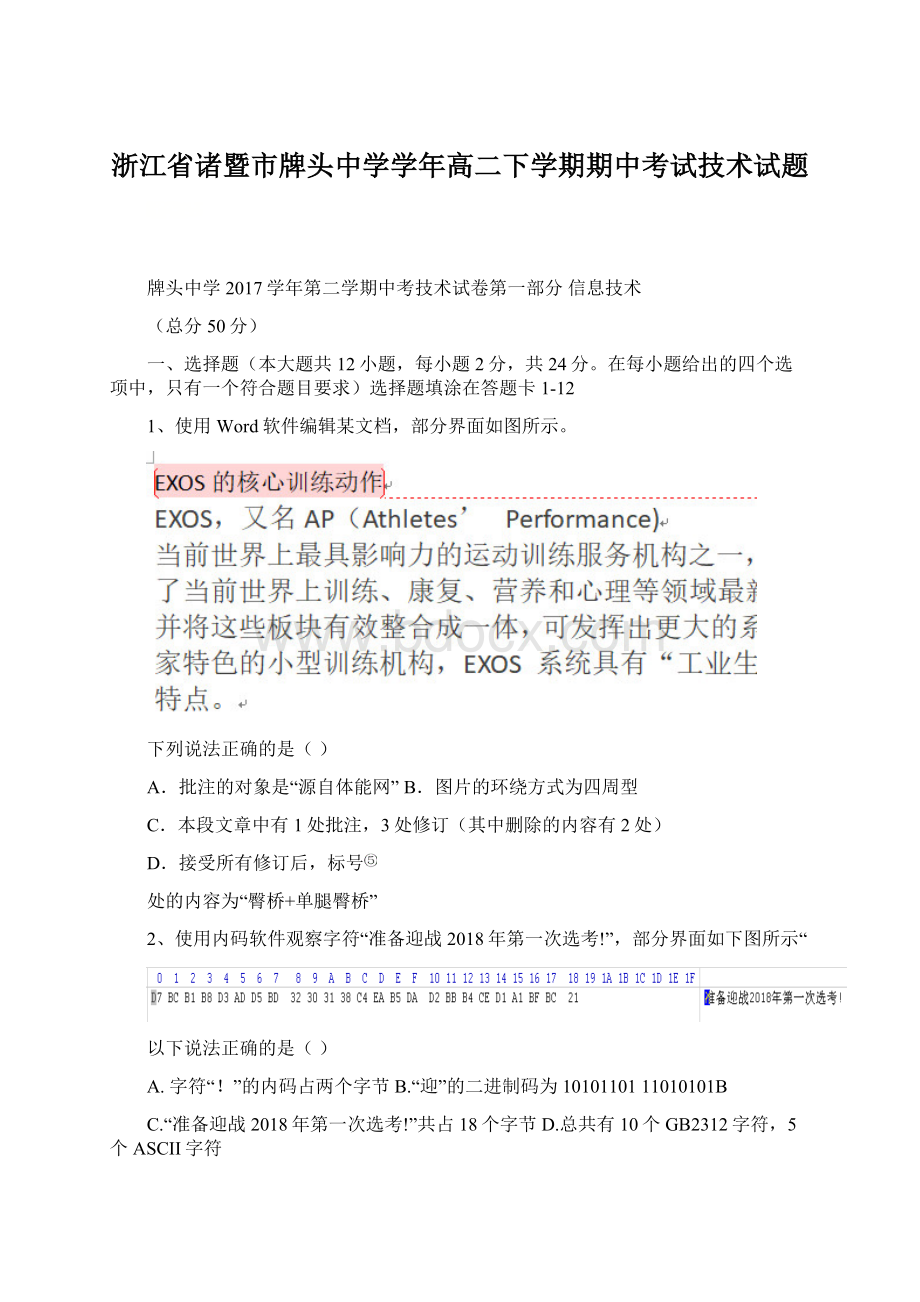
1、使用Word软件编辑某文档,部分界面如图所示。
下列说法正确的是()
A.批注的对象是“源自体能网”B.图片的环绕方式为四周型
C.本段文章中有1处批注,3处修订(其中删除的内容有2处)
D.接受所有修订后,标号
处的内容为“臀桥+单腿臀桥”
2、使用内码软件观察字符“准备迎战2018年第一次选考!
”,部分界面如下图所示“
以下说法正确的是()
A.字符“!
”的内码占两个字节B.“迎”的二进制码为1010110111010101B
C.“准备迎战2018年第一次选考!
”共占18个字节D.总共有10个GB2312字符,5个ASCII字符
3、如图所示某ACCESS数据表的相关信息,下列说法中正确的是()
A.将数据表导出到Excel中,将产生7列,21行的数据
B.可以添加一条“0118,项邦,男,1997/12/32,143,40,90”记录
C.可在数据表视图中增加一个自动编号类型的字段
D.在数据表视图中,将“身高体重分数”字段中的数据清空则该字段也自动删除
4、某算法的部分流程图如图所示。
执行这部分流程,则最终输出的结果为:
A.3,710B.3,6C.5,6D.5,7
5.某同学利用Flash软件制作按钮,界面如图所示。
下列说法正确的是()
A.该按钮有4个图层
B.该按钮应用到场景中,当鼠标经过按钮时按钮上会显示动画效果
C.该按钮删除文字图层上的点击帧,应用到场景上时该按钮将起作用
D.鼠标按下与指针经过时出现的文字一定相同
6.使用GoldWave软件编辑某音频文件,选择其中一段音频后的部分界面如图所示。
下列说法正确的是
A.插入10s静音后,以原格式保存,该声音的容量是原文件的1.25倍
B.选择声道为双声道后按原格式保存,声音文件存储容量翻倍
C.执行“剪裁”操作后,整个音频只剩下当前选中的部分
D.执行“更改音量”操作后,以原格式保存,其文件格式将变大
7.小宝利用Photoshop编辑某文件,部分界面如图所示。
下列说法正确的是
A.图像中“鹅”的内容不可见,原因是被其他图层所遮挡
B.可以对“背景”图层添加镜头光晕滤镜
C.“荷叶”图层无法移动到“天空”图层上面D.“美丽乡村”图层中有3种可见图层样式
8.将一幅未经压缩的1024×576像素、24位色BMP图片,转换成JPG格式后,存储容量为350KB,则压缩比约为
A.40:
1B.8:
1C.5:
1D.1:
1
9.有如下程序段:
Functionf(aAsInteger,bAsInteger)AsInteger
DimkAsInteger
k=aModb
Ifk=0Then
f=b
Else
f=f(b,amodb)
EndIf
EndFunction
PrivateSubCommand1_Click()
DimiAsInteger,jAsInteger
i=Val(Text1.Text)
j=Val(Text2.Text)
Text3.Text=Str(i*j/f(i,j))
EndSub
该程序运行之后,在text1与text2分别输入25与15,点击command1后在text3上显示的内容为()
A.5B.30C.75D.125
10.小孟为提高效率,对选择排序算法进行了如下改进:
在数组的所有元素中找出最小和最大数据的元素,然后将这两个元素分别与第一个和最后一个元素交换数据,在余下的元素中找出最小和最大数据的元素,分别与第二个和倒数第二个元素交换数据,以此类推,直到所有元素的数据按升序排列。
小赵编写的VB程序段如下:
p=1:
q=10
DoWhilepiMin=p:
iMax=p
Fori=p+1Toq
Ifa(i)iMin=i
elseIfa(i)>a(iMax)Then
iMax=i
endif
Nexti
t=a(iMax):
a(iMax)=a(q):
a(q)=t
①
t=a(iMin):
a(iMin)=a(p):
a(p)=t
p=p+1:
q=q-1
Loop
要使程序实现上述算法思想,则方框中的语句是
A.IfiMax=qTheniMax=iMinB.IfiMin=qTheniMin=iMax
C.IfiMax=qTheniMin=iMaxD.IfiMin=qTheniMax=iMin
11.某对分查找算法的VB程序段如下:
i=1:
j=7:
n=0:
f=False
Key=Val(Text1.Text)
DoWhilei<=jAndf=False
n=n+1
m=Fix((i+j)/2)
IfKey=a(m)Thenf=True
IfKeyLoop
数组元素a
(1)到a(7)的值依次为“2,19,29,34,43,52,66,68”。
文本框Textl中输入“46”后运行该程序,运行结束后下列说法不正确的是
A.变量f的值为FalseB.变量m的值为5C.变量j的值为4D.变量n的值为3
12.如下VB程序段:
Dima(1To8)AsInteger
a
(1)=13:
a
(2)=18:
a(3)=9:
a(4)=32
a(5)=12:
a(6)=11:
a(7)=7:
a(8)=20
start=1:
k=1
Fori=start+1To8
Ifa(i)k=k+1
t=a(i):
a(i)=a(k):
a(k)=t
EndIf
Nexti
t=a(start):
a(start)=a(k):
a(k)=t
Fori=k+1To8
List1.AddItemStr(a(i))
Nexti
执行上面代码段后,列表框List1中依次输出的数组元素值为
A.322018B.32122018
C.203218D.321820
二、非选择题(本大题共5小题,其中第13小题4分,第14小题5分,第15小题8分,第16小题3分,第17小题6分,共26分)
13.小张收集了近两年GDP总量前10各省有关数据,并使用Exce1软件进行数据处理,如下图所示。
第13题图a
(1)现需对各省市同比增幅进行排名,需要在E3单元格中输入公式,然后用自动填充功能完成E4:
E12单元格的计算。
(提示:
用RANK函数可求出某值在某区域中的名次,如:
=RANK(A1,$A$1:
8A$10)可计算出A1数据在区域A1:
A10中的名次)
(2)小张制作了一张图表,如第13题图b所示,他选择的数据
第13题图c
第13题图b
(3)小张对“2017年上半年GDP总量(亿元)”进行了筛选操作,筛选条件如第13题图c所示,当点击确定后,小张所做的图表(填:
会/不会)变化,如有变化,图示中所显示的柱子将有
条。
14.某种编码以4位二进制码为一组,每组前两位表示方向,后两位表示距离。
编写一个程序,将编码翻译成方向和距离,距离值为每组编码后两位二进制码转换为十进制数的值。
具体功能如下:
在文本框Text1中输入连续多组编码,单击“翻译”按钮Commandl,结果显示在列表框List1中。
程序运行界面如右图所示。
(1)要使程序运行时,文本框Text1的Width属性值为2018,可在Form_Load事件过程中添加语句(单选,填字母:
A.Width=2018/B.Textl.Width=2018/C.Width.Textl=2018)。
(2)实现上述功能的VB程序如下,请在划线处填人合适的代码。
PrivateSubCommand1_Click()
DimsAsString,cAsString,dAsString
DimnAsInteger,blAsInteger,b2AsInteger,vAsInteger,iAsInteger
s=Textl.Text:
n=Len(s):
i=1
DoWhilei<=n
c=Mid(s,i,2)
Ifc="00"Then
d="东"
ElseIfc="01"Then
d="南"
ElseIfc="10"Then
d="西"
Else
d="北"
EndIf
b1=Val(Mid(s,i+2,1))
b2=Val(Mid(s,i+3,1))
v=
List1.AddItemd+""+Str(v)
Loop
EndSub
(3)若文本框Textl中输入的内容为“1111”,单击“翻译”按钮,列表框List1中显示的内容是。
15.小王要创作一个关于“古诗欣赏”的多媒体作品。
请回答下列问题:
(1)在制作作品前,小王进行了相应的分析和规划。
下列不属于需求分析的是
(单选,填字母:
A.该作品要求使用Flash软件制作/B.该作品面向小学生演示播放/C.该作品的主题思想为“赏析经典诗词,弘扬传统文化”/D.根据主题思想和内容,制订该作品的脚本大纲)。
(2)小王使用Flash软件制作该多媒体作品,如下图所示。
图中“人物”图层第1帧到第10帧的补间动画实现了“人物”实例从完全透明到完全显示的效果,第1帧中“人物”实例的Alpha值是。
(3)图中“白云”图层第15帧到第48帧的动画补间实现了由一朵云逐渐变化为两朵云的效果,该动画的补间类型是。
(4)测试场景时,“标题”图层内容在播放完第40帧后消失。
为了使该图层第40帧内容延续显示至场景动画结束,下列操作方法可行的有(多选,填字母:
A.选中“标题”图层第41帧执行“清除关键帧”操作/B.删除“标题”图层第41帧到第60帧/C.选中“标题”图层第40帧执行“复制帧”操作,在第41帧执行“粘贴帧”操作/D.选中“标题”图层第60帧执行“插入关键帧”操作)。
(注:
全部选对的得2分,选对但不全的得1分,不选或有选错的得0分)
(5)要将当前场景动画播放时长从6秒调整为5秒,则需设置Flash文档的帧频为fps。
(6)测试影片时,单击“赏析”按钮,实现在浏览器中显示位于同一文件夹下“赏析.txt”文件的内容,并停止当前动画的播放,则“赏析”按钮的动作脚本为on(release){}。
16、挤牛奶问题:
如有三个农民每天清晨5点起床,然后去牛棚分别给3头牛挤奶。
第一个农民在300时刻(从5点开始计时,秒为单位)给他的牛挤奶,一直到1000时刻(总共挤了700个时刻),第二个农民在700时刻开始,在1200时刻结束(总共挤了500个时刻)。
第三个农民在1500时刻开始2100时刻结束(总共挤了600个时刻)。
期间最长挤奶的连续时间为900秒(从300时刻到1200时刻),而最长的无人挤奶的连续时间为300时刻(因第二个农民在1200时刻已结束,而第三个农民从1500时刻才开始,中间有300时刻没有人在挤牛奶)。
相应时刻如下图所示:
下面提供的程序是,从N个农民(1下图为两组不同数据程序运行后界面;
请在划线处填入相应的代码,使程序功能完善。
Dima(1To100)AsInteger'存放农民挤牛奶开始时刻
Dimb(1To100)AsInteger'存放农民挤牛奶结束时刻
DimnAsInteger'存放农民人数
PrivateSubForm_Load()
‘获取农民的人数与各个农民开始挤牛奶与结束挤牛奶的时间,并在list1中输出
‘相应的代码略
EndSub
PrivateSubCommand1_Click()
DimiAsInteger,jAsInteger
DimtAsInteger,ymaxAsInteger,nmaxAsInteger
DimbtimeAsInteger,etimeAsInteger,flagAsBoolean
flag=True:
i=1
DoWhilei<=1Andflag
flag=False
Forj=1Ton-i
Ifa(j)>a(j+1)Then
t=a(j):
a(j)=a(j+1):
a(j+1)=t
t=b(j):
b(j)=b(j+1):
b(j+1)=t
flag=True
EndIf
Nextj
i=i+1
Loop
btime=a
(1):
etime=b
(1)
ymax=etime-btime:
nmax=0
Fori=2Ton
If2Then
etime=b(i)
Ifetime-btime>ymaxThenymax=etime-btime
ElseIfetimeIfa(i)-etime>nmaxThennmax=a(i)-etime
btime=a(i):
etime=b(i)
EndIf
Nexti
Label2.Caption="最长挤牛奶时间为:
"+Str(ymax)+"时刻"
Label3.Caption="最长无人挤牛奶时间为:
"+Str(nmax)+"时刻"
EndSub
17、小王编写了一个依据成绩计算名次的VB程序,成绩为0到100之间的整数。
算法的基本思想:
先统计每个分数的个数,然后按照分数从高到低依次计算每个有效分数(该分数的个数不为0)对应的名次,分数相同时名次并列。
最高分为第1名,该分数的名次与个数之和为下一个有效分数的名次,以此类推。
程序用数组A存放每个分数对应的个数,数组B存放每个分数对应的名次。
例如,下表中最高分100有2个,并列第1名,则分数96的名次为分数100的名次加上分数100的个数,即第3名。
分数
100
99
98
97
96
95
94
…
0
个数(A数组)
2
0
0
0
1
0
3
…
0
名次(B数组)
1
3
4
…
程序运行时,学生数据显示在列表框List1中,单击“计算”按钮Command1,计算结果显示在列表框List2中,程序运行界面如图所示。
实现上述功能的VB程序如下,请回答下列问题:
(1)如表所示,若分数93的个数为2,则该分数对应的名次为_____________。
(2)请在划线处填入合适的代码。
DimsName(1To50)AsString'存放学生姓名
DimsScore(1To50)AsInteger'存放学生分数
DimrecCountAsInteger'存放学生人数
PrivateSubForm_Load()
'本过程从数据库中读取学生数据,存储在相应的变量中,并在List1中显示
'代码略
EndSub
Functionads(xAsInteger,nAsInteger)AsString'整数转换成长度固定的字符串
DimsxAsString,nxAsInteger,iAsInteger
sx=Str(x):
nx=Len(sx)
Fori=1Ton-nx
sx=""+sx
Nexti
1
EndFunction
PrivateSubCommand1_Click()
DimA(0To100)AsInteger'存放每个分数的个数
DimB(0To100)AsInteger'存放每个分数的名次
DimmcAsInteger,scoreAsInteger,iAsInteger
Fori=0To100
A(i)=0
Nexti
Fori=1TorecCount'计算每个分数的个数
2
Nexti
mc=1
Fori=100To0Step-1'计算每个分数的名次
IfA(i)<>0Then
B(i)=mc
3
EndIf
Nexti
List2.Clear
List2.AddItem"姓名分数名次"
List2.AddItem"----------------"
Fori=1TorecCount
score=sScore(i)
mc=B(sScore(i))
List2.AddItemsName(i)+ads(score,5)+"第"+ads(mc,3)+"名"
Nexti
EndSub
参考答案
一、选择题答案(每题2分)
1
2
3
4
5
6
B
D
A
B
C
A
7
8
9
10
11
12
B
C
C
B
C
D
二、非选择题(本大题共5小题,其中第13小题4分,第14小题5分,第15小题8分,第16小题3分,第17小题6分,共26分)
13、
(1)=rank(d3,$d$3:
$d$12)(1分)
(2)A2,E2,A5:
A10,E5:
E10(1分)
(3)会(1分)2(1分)
14、
(1)B(1分)
(2)
b1*2+b2(2分)
i=i+4(1分)(3)北3(1分)
15、
(1)D(1分)
(2)0%或0(1分)(3)形状补间(1分)(4)AC(2分)
(5)12(1分)(6)stop();geturl(“赏析.txt”);(2分)
16、
(1)n-1(1分)
(2)etime>=a(i)Andetime17、
(1)7(1分)
(2)ads=sx(1分)(3)A(sScore(i))=A(sScore(i))+1(2分)(4)mc=mc+a(i)或mc=b(i)+a(i)(2分)
第二部分通用技术
一、选择题(本大题共13小题,每小题2分,共26分。
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)
1.如图所示是深圳市某科技有限公司开发的人形机器人——阿尔法二代。
关于该机器人的相关技术,下列说法不正确的是
A.既能做各种复杂的动作,还能辅助治疗自闭症患者,体现了技术的综合性
B.与第一代只能模仿人类做出各种动作相比,阿尔法二代更加智能,能听懂人话,能与人互动,体现了技术的创新性
C.该公司在舵机伺服系统方面,拥有自主知识产权,体现了技术的专利性
D.未来的阿尔法机器人将涉足家庭陪护、机器人教育等更多智能化的工作领域,势必对社会劳动力结构产生深刻影响。
人们需要不断学习新的技能,从而适应劳动力市场变化
2.如图所示是一款新型的弯柄平板锉(手柄弯曲60°)。
从设计中的人机关系角度分析,以下说法中不正确的是
A.手柄的颜色不属于人机设计要考虑的内容
B.手柄的长度主要取决于手掌宽度,考虑了人体的静态尺寸
C.手柄无突出的锐边和棱角,实现了安全目标
D.以手柄的弯曲代替手腕的弯曲,有效减少作业者右臂疲劳度,实现了舒适目标
通用技术老师要求学生利用15mm厚的多层板设计一款便携式木质小板凳。
如图所示是某小组的设计方案,完成第3~4题。
3.该小组同学对自主设计的小板凳进行了测试和评价,评价结果如图所示。
以下对坐标图的分析中不正确的是
A.成本较高
B.稳固性较差
C.携带很不方便
D.易于制造
4.该组同学发现,原有方案在收纳时,无法折叠成预想的效果(如图所示)。
于是,提出了如下四个改进措施,其中合理的是
ABCD
5.如图所示是一个模型的立体图,其正确的三视图是
某同学欲将一块120×50×2的铁板加工成如图所示的轮叉。
完成第6~7题。
6.为确保安装轮轴的两个孔的位置精度符合使用要求,以下加工流程中合理的是
A.锯割→划线→锉削→划线→钻孔→弯折
B.划线→钻孔→锉削→划线→锯割→弯折
C.划线→锯割→锉削→弯折→划线→钻孔
D.划线→弯折→锯割→锉削→划线→钻孔
7.制作支架的过程中,以下操作中不正确的是
A.使用划规划弧线时,尽量一次划成
B.使用钢锯锯割时,尽量多使用锯条的中间部分
C.用平锉锉削支架的弧面部分
D.钻孔时带防护眼镜
8.如图所示是古代弓箭发射器,图中绞杆、绞轴、主弓的受力形式分别为
A.受拉、受拉、受拉B.受弯曲、受扭转、受弯曲
C.受拉、受弯曲、受弯曲
D.受弯曲、受扭转、受拉
9.如图所示是一款电动平衡车。
该系统主要由控制器、陀螺仪、电机、蓄电池、车体等部分组成。
关于该系统,下列说法不正确的是
A.系统整体具有的代步功能是各要素在孤立状态下所没有的。
这体现了系统的整体性
B.若电池电芯不合格,则会影响平衡车中充电器的正常工作。
这体现了系统的相关性
C.当车身前倾或后倾时,车轮会随之前进或后退,以维持车身平衡。
这体现了系统的动态性
D.这款车不但短途代步非常方便,还可以有效缓解资源的消耗和空气污染。
这体现了系统的目的性
10.如图所示是网络型温室智能控制系统示意图。
该系统可实时采集、存储温室内的环境信息(室内温度、土壤湿度、CO2浓度、光照等环境参数),然后通过网络将数据传输给控制计算机,并按控制计算机的命令对温室的执行机构进行控制,从而实现对温室的智能控制。
下列关于该控制系统的说法,错误的是
A.控制器是控制计算机B.输出量是实际的温室环境信息
C.执行器温室智能采集控制器
D.检测装置是各类传感器
11.【加试题】图示是一个简易的光控灯电路。
合上开关K,电路工作,当外界光线暗到一定的程度,Rg阻值很大,LED灯亮;当外界光线亮到一定的程
 升级会员
升级会员 