作业有限元.docx
《作业有限元.docx》由会员分享,可在线阅读,更多相关《作业有限元.docx(16页珍藏版)》请在冰豆网上搜索。
作业有限元
作业1:
求截面面积F、形心位置y0、x0,惯性矩Ix0、Iy0
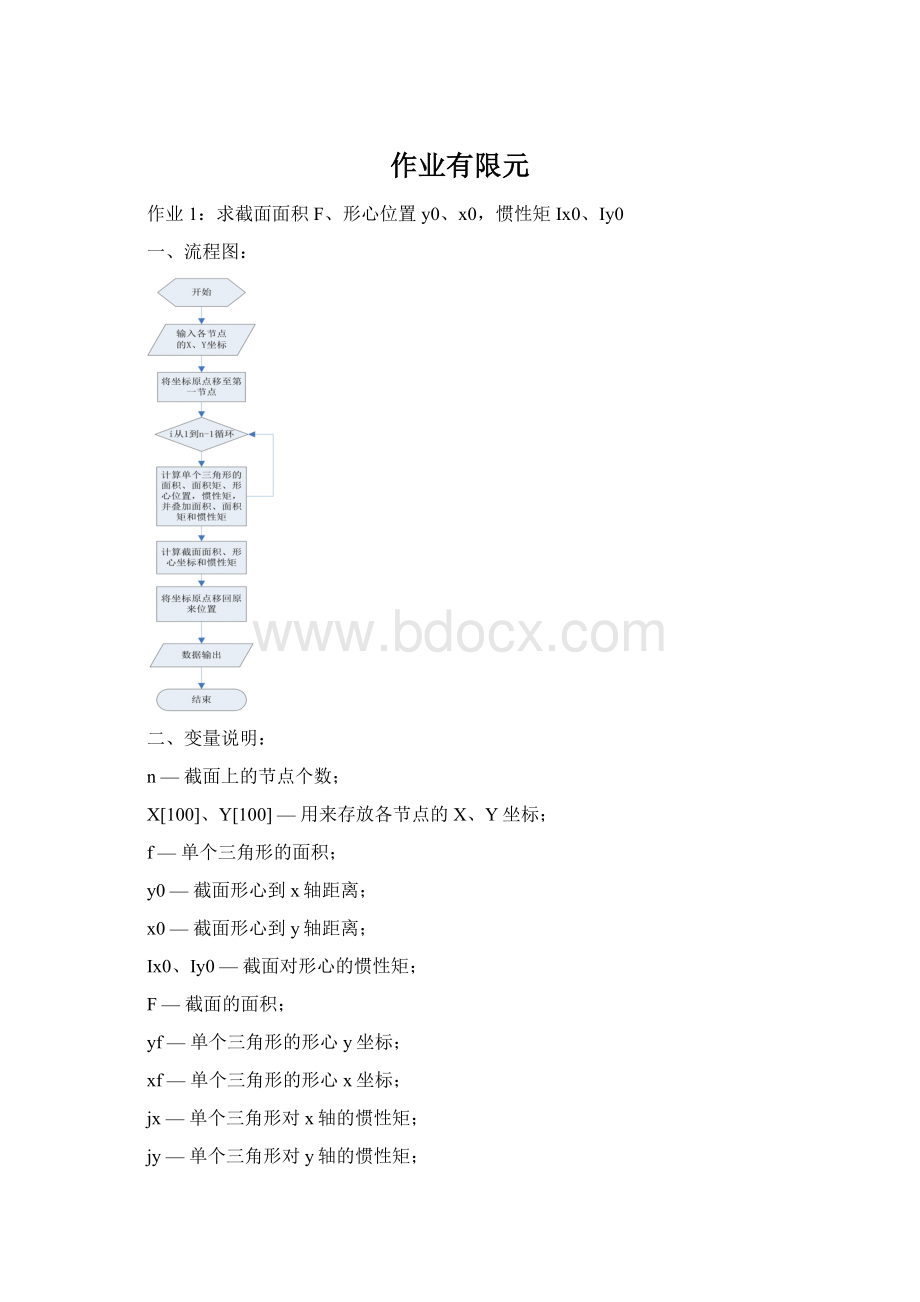
一、流程图:
二、变量说明:
n—截面上的节点个数;
X[100]、Y[100]—用来存放各节点的X、Y坐标;
f—单个三角形的面积;
y0—截面形心到x轴距离;
x0—截面形心到y轴距离;
Ix0、Iy0—截面对形心的惯性矩;
F—截面的面积;
yf—单个三角形的形心y坐标;
xf—单个三角形的形心x坐标;
jx—单个三角形对x轴的惯性矩;
jy—单个三角形对y轴的惯性矩;
Sx—对x轴的静面矩;
Sy—对y轴的静面矩。
三、源程序代码:
#include
#include
voidmain()
{
intn,i;
cout<<"请输入节点个数:
";
cin>>n;
doubleX[100],Y[100];
for(i=0;i{
cout<<"请输入第"<";
cin>>X[i];
cout<<"请输入第"<";
cin>>Y[i];
}
doublef,y0,x0,Ix0,Iy0,F=0.0,yf,xf,jx,jy,Sx=0.0,Sy=0.0;
//将坐标原点移至第一点;
for(i=1;i{
X[i]=X[i]-X[0];
Y[i]=Y[i]-Y[0];
}
for(i=1;i{
f=(X[i]*Y[i+1]-Y[i]*X[i+1])/2.0;
yf=(Y[i]+Y[i+1])/3.0;
xf=(X[i]+X[i+1])/3.0;
jx=f*(Y[i]*Y[i]+Y[i]*Y[i+1]+Y[i+1]*Y[i+1])/6.0;
jy=f*(Y[i]*X[i]+X[i]*X[i+1]+X[i+1]*X[i+1])/6.0;
F=F+f;
Sx=Sx+f*yf;
Sy=Sy+f*xf;
}
y0=Sx/F;
x0=Sy/F;
Ix0=jx-F*y0*y0;
Iy0=jy-F*x0*x0;
y0=y0+Y[0];
x0=x0+X[0];
cout<<"**********计算结果**********/n";
cout<<"F="<cout<<"y0="<cout<<"x0="<cout<<"Ix0="<cout<<"Iy0="<cout<<"****************************"<}
四、算例:
如上图所示:
节点数N=22,节点编号如图所示。
各节点的坐标如下:
计算结果如下:
作业2:
将BASIC程序改为FORTRAN程序(或C程序)
一、流程图
二、变量说明:
L—跨度;
LB—单主梁宽;
RB—人行道宽度;
XB—行车道宽度;
DX—插值函数宽度;
NCD—车道数;
YE[350]—用来存放插值点坐标;
N—桥面板分块数;
MM—主梁数;
NN—插值点数;
WIJ[15][350]—用来存放挠度值;
ETAIJ[15][350]—用来存放影响线竖向坐标;
MCQ[15]—用来存放汽车荷载横向分布系数;
MCL[15]—用来存放履带车荷载横向分布系数;
MCG[15]—用来存放挂车荷载横向分布系数;
MCR[15]—用来存放人群荷载横向分布系数;
Y[350]—用来存放主梁Y坐标;
DE—弹性模量;
G—剪切模量;
MC[4]—记录四条车道的初始分布系数;
JX—纵向单宽抗弯惯性矩;
JY—横向单宽抗弯惯性矩;
JTXY—纵横向抗扭惯性矩之和。
三、源程序代码:
#include
#include
#include
voidmain()
{
inti,N,MM=7,NN,NCD,k,m,j,IEND,IK1,IK2,IK,IL,J1,J;
doubleYE[350],Y[15],WIJ[15][350],ETAIJ[15][350],WB[350],MC[4],MCQ[15],MCG[15],MCL[15],MCR[15];
doubleDX,L,LB,RB,XB,JX,JY,JTXY,DE=1.0,DB,ALPHA,A,B,THETA,OMEGA,PHI,ETA,GAMMA,DELTA,DM,DN,C1,C2,C3,C4;
doublePSI,D1,D2,CC,SS,SC,CS,DP,DQ,DS,DR,YJ,EMM,CP,SP,CE,SE,AMM,BMM,CMM,DMM,CA,CB,SA,SB,YY,CAY,CBY,WC,SAY,SBY,EPS,AW,W;
constdoublePI=3.1415926,G=0.425,E=2.7182818;
cout<<"请输入N:
"<cin>>N;
cout<<"请输入DX:
"<cin>>DX;
cout<<"请输入L:
"<cin>>L;
cout<<"请输入LB:
"<cin>>LB;
cout<<"请输入RB:
"<cin>>RB;
cout<<"请输入XB:
"<cin>>XB;
cout<<"请输入JX:
"<cin>>JX;
cout<<"请输入JY:
"<cin>>JY;
cout<<"请输入JTXY:
"<cin>>JTXY;
DB=LB*N/2;
NN=int(2*DB/DX+0.1)+1;//插值系数nn
NCD=int((XB+0.3)/3.1);//车道数
if(NCD>4)
{
NCD=4;
}
cout<<"N="<cout<<"DX="<cout<<"L="<cout<<"LB="<cout<<"RB="<cout<<"XB="<cout<<"JX="<cout<<"JY="<cout<<"JTX+JTY="<cout<<"********Coordinatesofbeamlocation********\n";
cout<<"No."<for(i=0;i{
Y[i]=-DB+LB*(i-0.5);
cout<}
YE[0]=-DB;
for(i=1;i{
YE[i]=YE[0]+DX*i;
}
ALPHA=G*JTXY/(2*DE*sqrt(JX*JY));
A=sqrt(0.5*(1-ALPHA));
B=sqrt(0.5*(1+ALPHA));
THETA=DB*pow((JX/JY),0.25)/L;
OMEGA=THETA*PI/DB;
PHI=THETA*PI*A;
ETA=THETA*PI*B;
GAMMA=THETA*A;
DELTA=THETA*B;
DM=(2*A*A-2*B*B+1)*B*sinh(PHI)*cosh(PHI)-(2*A*A-2*B*B-1)*A*sin(ETA)*cos(ETA);
DN=(2*A*A-2*B*B+1)*B*sinh(PHI)*cosh(PHI)+(2*A*A-2*B*B-1)*A*sin(ETA)*cos(ETA);
C1=A*sin(ETA)-B*cos(ETA);
C2=A*sin(ETA)+B*cos(ETA);
C3=A*A*sin(ETA)+2*A*B*cos(ETA)-B*B*sin(ETA);
C4=A*A*cos(ETA)+2*A*B*sin(ETA)-B*B*cos(ETA);
for(k=0;k{
E=YE(k);
PSI=PI*E/DB;
D1=GAMMA*PSI;
D2=DELTA*PSI;
CC=cosh(D1)*cos(D2);
SS=sinh(D1)*sin(D2);
SC=sinh(D1)*cos(D2);
CS=cosh(D1)*sin(D2);
DP=CC*C1-SS*C2;
DQ=SC*C1-CS*C2;
DS=SC*C3-CS*C4;
DR=CC*C3-SS*C4;
for(i=0;i{
YJ=Y[i];
WIJ[i][k]=0;
for(m=0;m{
EMM=1/(4*A*pow(m,3)*pow(OMEGA,3)*DE*JY);
CP=cosh(PHI);
SP=sinh(PHI);
CE=cos(ETA);
SE=sin(ETA);
AMM=EMM/DM*(CP-SP)*(DP*(A/B*CP*SE-SP*CE)+DR*(2*A*CP*CE+(A*A-B*B)/B*SP*SE));
BMM=EMM/DN*(CP-SP)*(DQ*(A/B*SP*SE-CP*CE)+DS*(2*A*SP*CE+(A*A-B*B)/B*CP*SE));
CMM=(-1.0)*EMM/DN*B*(CP-SP)*(DQ*(A/B*CP*CE+SP*SE)+DS*(-2*A*CP*SE+(A*A-B*B)/B*SP*CE));
DMM=(-1.0)*EMM/DM*B*(CP-SP)*(DP*(A/B*SP*CE+CP*SE)+DR*(-2*A*SP*SE+(A*A-B*B)/B*CP*CE));
CA=cosh(m*OMEGA*A*YJ);
CB=cos(m*OMEGA*B*YJ);
SA=sinh(m*OMEGA*A*YJ);
SB=sin(m*OMEGA*B*YJ);
YY=abs(E-YJ);
CAY=cosh(m*OMEGA*A*YY);
CBY=cos(m*OMEGA*B*YY);
SAY=sinh(m*OMEGA*A*YY);
SBY=sin(m*OMEGA*B*YY);
WC=(AMM*CA*CB+BMM*SA*CB+CMM/B*CA*SB+DMM/B*SA*SB+EMM*(CAY-SAY)*(CBY+A/B*SBY))*pow(-1,((m+1)/2));
WIJ[i][k]=WIJ[i][k]+WC;
EPS=abs(WC/WIJ[i][k]);
if(EPS<1e-7)
break;
}
}
AW=0.0;
for(i=0;i{
AW=AW+WIJ[i][k];
}
for(i=0;i{
ETAIJ[i][k]=WIJ[i][k]/AW;
}
}
cout<<"********Coordinatesofloadlatrelinfluenceline********\n";
cout<<"No."<for(i=0;i{
cout<}
cout<for(j=0;j{
cout<for(i=0;i{
cout<}
cout<}
//开始计算分布系数;
for(IL=0;IL{
IEND=int((XB-2.8)/DX+0.1)+1;
IK1=int(1.8/DX+0.1);
IK2=int(1.3/DX+0.1);
IK=IK1+IK2;
for(i=0;i{
MC[i]=0;
}
if(NCD<2)//单车道;
{
for(i=0;i{
J=int((DB-XB/2+0.5)/DX+0.1)+i;
W=(ETAIJ[IL][J]+ETAIJ[IL][J+IK1])/2;
if(W>MC[0])
{
MC[0]=W;
}
}
}
else
{
if(NCD<3)//双车道
{
for(i=0;i{
J=int((DB-XB/2+0.5)/DX+0.1)+i;
W=(ETAIJ[IL][J]+ETAIJ[IL][J+IK1]+ETAIJ[IL][J+IK]+ETAIJ[IL][J+IK+IK1])/2;
if(W>MC[1])
{
MC[1]=W;
}
}
if(MC[0]>MC[1])
{
MC[1]=MC[0];
}
}
else
{
if(NCD<4)//三车道
{
for(i=0;i{
J=int((DB-XB/2+0.5)/DX+0.1)+i;
W=(ETAIJ[IL][J]+ETAIJ[IL][J+IK1]+ETAIJ[IL][J+IK]+ETAIJ[IL][J+IK+IK1]+ETAIJ[IL][J+2*IK]+ETAIJ[IL][2*IK+IK1])/2;
if(W>MC[2])
{
MC[2]=W;
}
}
MC[2]=0.8*MC[2];//折减系数
if(MC[1]>MC[2])
{
MC[2]=MC[1];
}
}
else//四车道
{
for(i=0;i{
J=int((DB-XB/2+0.5)/DX+0.1)+i;
W=(ETAIJ[IL][J]+ETAIJ[IL][J+IK1]+ETAIJ[IL][J+IK]+ETAIJ[IL][J+IK+IK1]+ETAIJ[IL][J+2*IK]+ETAIJ[IL][2*IK+IK1]+ETAIJ[IL][J+3*IK]+ETAIJ[IL][3*IK+IK1])/2;
if(W>MC[3])
{
MC[3]=W;
}
}
MC[3]=0.7*MC[3];
if(MC[2]>MC[3])
{
MC[3]=MC[2];
}
}
}
}
MCQ(IL)=MC(NCD);//挂车
IEND=int((XB-5.2)/DX+0.1);
MCG(IL)=0;
for(i=0;i{
J=int((DB-XB/2+1.25)/DX+0.1)+i;
IK=int(0.9/DX+0.1);
W=(ETAIJ[IL][J+2*IK]+ETAIJ[IL][J+3*IK])/4;
if(W>MCG[IL])
{
MCG[IL]=W;
}
}
IEND=int((XB-4.5)/DX+0.1)+1;
MCL[IL]=0;
for(i=0;i{
J=int((DB-XB/2+0.65)/DX+0.1)+i;
J1=int((DB-XB/2+3.15)/DX+0.1)+i;
IK=int(0.7/DX+0.1)+1;
W=0;
for(k=0;k{
W=W+ETAIJ[IL][J+K]+ETAIJ[IL][J1+K];
}
if(W>MCK[IL])
{
MCL[IL]=W;
}
}
MCL[IL]=MCL[IL]/(W*2*IK);
if(RB<0.25)
{
MCR[IL]=0;
continue;
}
J=int((DB-XB/2-RB/W)/DX+0.1)+1;
W=0;
if(ETAIJ[IL][J]>0)
{
W=W+ETAIJ[IL][J];
}
if(ETAIJ[IL][NN-J]>0)
{
W=W+ETAIJ[IL][NN-J];
}
MCR[IL]=W*RB;
}
cout<<"********Loadlateraldistributionfactor********\n";
cout<<"NO."<for(IL=0;IL{
cout<}
cout<<"*********************************"<}
四、算例:
作业三:
利用位移互等定理计算位移影响线
一、流程图:
 升级会员
升级会员 