实验四机构运动参数测试.docx
《实验四机构运动参数测试.docx》由会员分享,可在线阅读,更多相关《实验四机构运动参数测试.docx(17页珍藏版)》请在冰豆网上搜索。
实验四机构运动参数测试
实验四机构运动参数测试
一、实验目的
1.通过运动参数测试实验,掌握机构运动的周期性变化规律,并学会机构运动参数如位移、速度和加速度(包括角位移、角速度和角加速度)的实验测试方法;
2.通过利用传感器、工控机等先进的实验技术手段进行实验操作,训练掌握现代化的实验测试手段和方法,增强工程实践能力;
3.掌握原动件运动规律不变,改变机构各构件尺寸,从动件运动参数的测量方法;
4.通过进行实验结果与理论数据的比较,分析误差产生的原因,增强工程意识,树立正确的设计理念。
二、实验装置
1.实验装置的组成
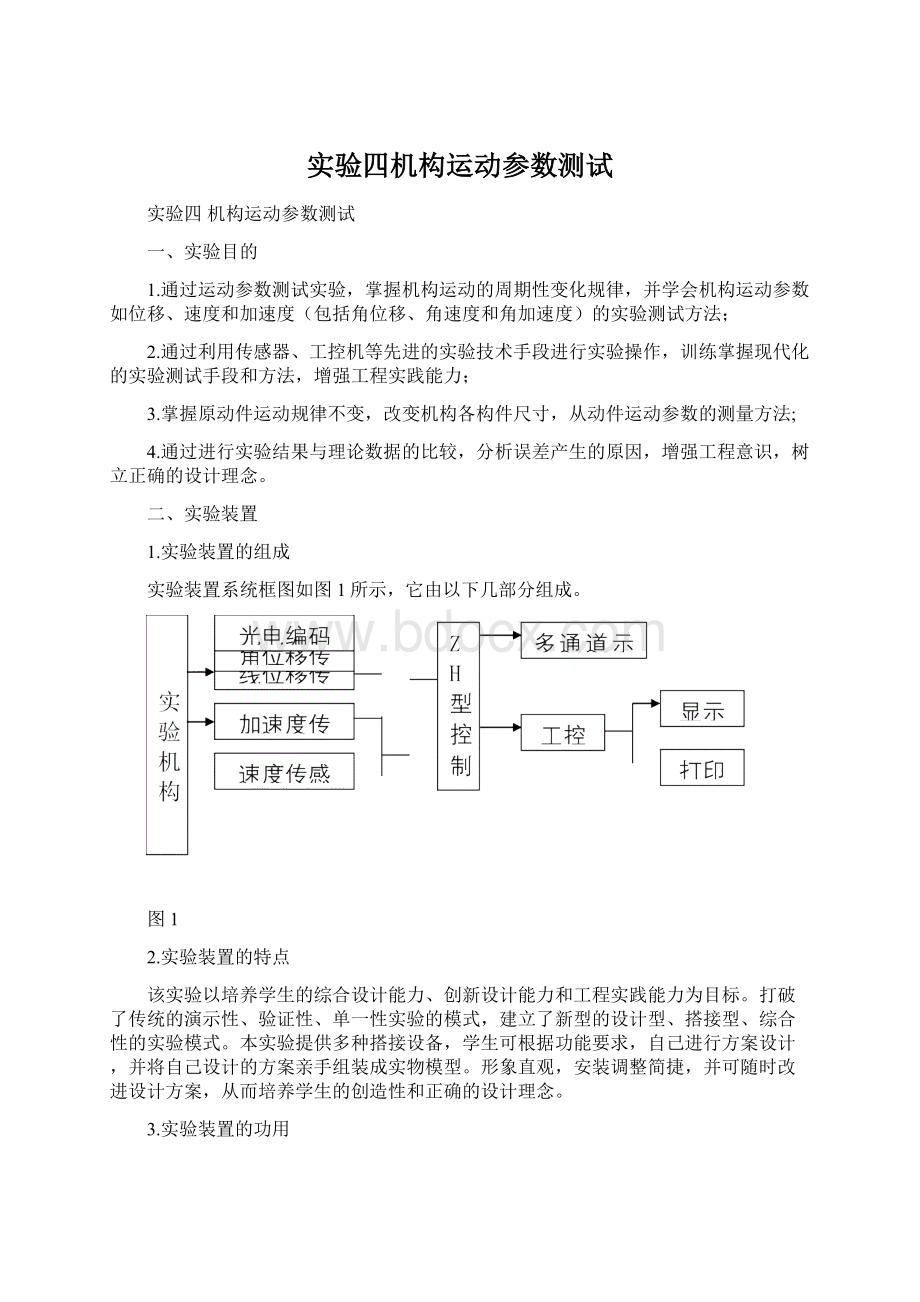
实验装置系统框图如图1所示,它由以下几部分组成。
图1
2.实验装置的特点
该实验以培养学生的综合设计能力、创新设计能力和工程实践能力为目标。
打破了传统的演示性、验证性、单一性实验的模式,建立了新型的设计型、搭接型、综合性的实验模式。
本实验提供多种搭接设备,学生可根据功能要求,自己进行方案设计,并将自己设计的方案亲手组装成实物模型。
形象直观,安装调整简捷,并可随时改进设计方案,从而培养学生的创造性和正确的设计理念。
3.实验装置的功用
实验中,可组合出:
①曲柄滑块;②双曲柄;③摆动导杆;④曲柄摇杆;⑤滑块为输出构件的简单的平面六杆机构(组合机构);⑥直动导杆凸轮机构;⑦摆动凸轮机构和动力学调速实验台等多种典型的运动机构;另外,各构件尺度参数可调,突出了测试机构的尺寸参数的多变性,如:
在曲柄滑块机构中设计了偏心块构件,可将对心式曲柄滑块机构变位偏置式曲柄滑块机构;在双曲柄机构中,可调节连杆尺寸使之变为平行四边形机构等。
这样可增加学生的实验题目和测试目标,使同学在实验中充分理解尺寸参数有、原动件运动规律等因素对机构运动学方面的影响,巩固学生在课堂中所学知识,使之产生感性认识,增加对机械学研究的兴趣,同时达到一机多用的目的。
4.实验装置主要技术参数
(1)电机额定功率和电机转速
机构运动参数测试实验装置电机参数:
功率:
40W。
电机转速:
1300r/min。
直齿轮减速箱速比:
1:
20。
(2)传感器
1线位移传感器(1个):
型号:
WDL—100—2;精度:
独立线性度0.5%;量程:
100mm;
2角位移传感器(1个):
型号:
WD35D—4;精度:
独立线性度0.1%;量程:
00—3400;
3光电编导器(1个):
型号:
LEC—102.4BM—G05E;精度:
1024脉冲/周;量程:
00—3600;
(3)实验装置主要构件和部件基本参数
①机构运动参数测试实验装置电机支撑件:
1个。
②底板:
460×330×30mm。
③曲柄:
L50(L35):
1个;L90(L50):
2个。
④连杆:
L30:
1个;L160:
2个;L90:
1个。
⑤支撑座组件:
中心高120mm支撑座2个。
⑥摆动导杆:
1个。
⑦滑块组件:
1套。
⑧传感器支撑架:
角位移传感器支撑架:
1个;线位移传感器支撑架:
1个;光电移传感器支撑架:
1个。
⑨凸轮:
1个。
⑩直动从动构件组件:
1套。
摆动从动构件:
1个。
偏心调整块:
4个。
偏心块:
2块。
(4)实验装置所需主要设备:
实验装置电器控制箱:
1个。
(5)实验所需工具:
①木榔头:
1把;②棍搬子:
6#(1个);③小改锥:
1把;④活搬子:
1把;⑤钢板尺:
1把。
三、实验数据采集系统软件说明
该实验采用美国NI(美国国家仪器公司NATIONALINSTRUMENTS,简称NI)数据采集卡,进行数据采集;利用LabVIEW图形化编程平台进行数据处理和图形输出。
其数据采集原理为:
首先,机构在电机的驱动下运转起来,用传感器(位移传感器、角位移传感器、光电传感器)将机械量(如:
位移、加速度)转变为电量,即电信号。
其次,通过测试控制柜中的数据采集卡对该信号进行采集、分析,再将模拟量转变为数字量,即完成模—数转换。
最后,通过LabVIEW进行程序处理将其转化为运动曲线并输出在计算机的屏幕上。
LabVIEW与以往那些基于文本的高级编程语言不同,它采用的是一种全新的数据流图编程方式,即用形象的图标和连线来代替一行一行的文本,这种“画”程序的方法非常符合科学家和工程师所习惯和常用的框图模块方法及思维方式。
并且,LabVIEW还具有大量的的特殊功能,是所有传统高级编程语言不具备的,在LabVIEW中可直接调用编写好的MATLAB代码,不必重写程序;同样,在LabVIEW中还可以调用C语言编写的程序;此外,LabVIEW中还提供方便和实用的网络测量数据传输、远程测量控制等网络功能。
在我们的实验测试中正是利用了LabVIEW的数据输入输出、数学运算、图像处理输出、函数运算等功能模块和“画”程序的特点,由学生自行进行数据采集、数据处理、图形输出的编程。
这样一来,首先可以开发学生各自的主观能动性和创新思维模式,其次,可以让学生通过实验熟悉LabVIEW软件的一些常用功能和程序的编写方法,掌握先进的测试方法和手段。
(1)测试控制柜的使用方法和操作说明(LabVIEW7Express程序设计)
A、启动数据采集向导[DAQAssistant]
1)接通电源,启动计算机,进入Windows[开始]界面。
2)双击[NILabVIEW7.1]图标,进入LabVIEW启动界面。
3)单击[New...],进入新建程序界面。
4)选择[DataAcquisitionwithNI-DAQmx.vi],单击[OK],自动建立
[DAQAssistant]图标,并进入前面板[FrontPanel]设计界面。
LabVIEW启动界面
B、前面板设计
1)在前面板区域,单击右键,显示控制[Controls]模板。
控制模板
2)选择[GraphInds]图标内含的[Graph]图标,拖至前面板适当位置后单击,即可建立一个波形显示器。
若要建立数字显示器,选择[NumInds]图标内含的[NumInd]图标。
波形显示器
3)显示器大小可通过拖动边框上的兰色方块进行调整。
4)双击显示器左上角标签内容,可修改显示名称。
C、程序框图设计
1)在状态栏单击[Blok...]图标,进入[BlokDiagram]程序框图设计界面。
[BlokDiagram]程序框图设计界面
2)双击[DAQAssistant]图标,进入数据采集向导界面。
数据采集向导界面
●选择[AnalogInput]→[Voltage],输入模拟量为电压信号。
●
选择输入通道[ai0]至[ai7],单击[Finish]按钮,进入任务设置界面。
任务设置界面
●设置电压输入范围,信号连接方式(差动或单端),采样方式、速度等。
●单击[Test]按钮,可进行信号采集、显示。
●单击[OK],任务设置完毕,返回程序框图设计界面。
3)在程序框图空白处单击右键,显示[Functions]功能选择框。
功能选择界面
4)选择[Arith/compare]数学运算图标,其中包括[TimeDomain]时域运算,可进行信号的微分[Differential]、积分[Integral]等运算。
还包括[Numeric]数字运算,可进行加、减、乘、除、开方、倒数等运算以及设置[Numconst]常数图标。
5)选图标在框图中排列整齐后,用光标靠近图标的输出端,光标自动变为接线工具,单击左键即可将导线连接到另一图标的输入端。
程序实例
6)光标指到连线,单击右键,在下拉菜单中可选择[CreateWireBranch]建立分支。
也可将连线直接引至另一连线,自动合并连接。
7)用光标选择某个对象,按[Del]键即可删除。
D、运行程序
1)单击[FrontPanel],返回前面板,单击[Run]按钮,运行程序。
2)单击[STOP]按钮,程序停止运行,数据采集显示如图。
更多的LabVIEW7Express程序设计方法可参考[Help]。
数据采集显示
下面是曲柄滑块机构运动参数,按照上述步骤进行操作并将运动线图输出的例子。
双击桌面上的“机构运动参数测试”进入数据采集程序界面(如图2)。
点击程序界面中的相应运动参数测试功能按扭(如:
曲柄滑块),进行数据采集程序运行后可见实时数据采集信号。
图2数据采集程序界面数据采集显示
(2)数据输出方式
当采用“数据采集与分析系统”进行数据输出时,学生可通过人—机交互界面进行数据采集,系统将对当前采样数据文件进行分析计算,并将分析结果以运动曲线图(S---φ,v---φ,a---φ运动曲线图)的方式显示在波形显示窗口中,同时保存分析结果(用屏幕硬拷贝方式,按下PrtScr键即可)方便以后分析,并可将其打印出来,以便与理论曲线进行比较。
三、实验内容与步骤
1、曲柄摇杆机构实验
1)被测对象基本参数
曲柄摇杆机构如图所示,各杆长度如下:
曲柄:
lAB=50mm(35mm);连杆:
lBC=160mm;摇杆:
lCD=90mm(50mm);机架:
lAD=180mm;曲柄转速n1=65r/min
2)测试内容
一个运动循环内,摇杆角位移θ、角速度ω和角加速度ε与机构位置(曲柄转角
)之间关系,并给制θ-
、ω-
和ε-
线图。
改变构件尺度参数后,再进行测试。
(自选)
3)实验步骤
①实验原理图:
曲柄摇杆机构实验原理图
②实验步骤:
a.确定所选机构中构件的尺寸,正确搭接机构;
b.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
c.打开计算机电源运行采集程序;
d.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
e.调整曲柄长度或摇杆长度,重复第三项内容;
f.分别整理实验各项运动曲线数据,填写实验报告;
g.实验报告填写前应事先根据已知尺寸算出θ、ω、ε的值并画出当曲柄30°时的运动线图。
4)问题讨论
①改变连杆尺寸从动件运动规律是否发生变化?
②实验的测试数据和计算数值,有哪些误差的影响因素?
2、曲柄滑块机构实验
1)被测对象基本参数
曲柄滑块机构如图所示,各杆长度如下:
曲柄:
lAB=50mm(35mm);连杆:
lBC=160mm;偏距:
e=20mm;曲柄转速:
n1=65r/min;
2)测试内容
一个运动循环内,滑块位移S、速度v和加速度a与机构位置(曲柄转角
)之间关系,并绘制S-
、v-
和a-
线图。
改变构件尺度参数后,再进行测试。
(自选)
3)实验步骤
①实验原理图:
曲柄滑块机构实验原理图
②实验步骤:
1.确定所选机构中构件的尺寸,正确搭接机构;
2.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
5.调整曲柄长度,重复第三项内容;
6.调整滑块机架高度e=20mm,并将曲柄调整为50mm重复第三项内容;
7.分别整理实验各项数据,填写实验报告;
8.实验报告填写前应事行根据已知尺寸算出S、v、a的值,并画出运动线图。
4)问题讨论
①改变连杆尺寸从动件运动规律是否发生变化?
②曲柄滑块机构的急回特性是如何产生的?
③实验的测试数据和计算数值,误差多大?
有哪些影响因素?
3、双曲柄机构实验
1)被测对象及基本参数
双曲柄机构如图所示,各杆长度如下:
主动曲柄lAB=50mm(35mm);从动曲柄lCD=90mm(50mm);
连杆lBC=90mm;机架lAD=30mm;曲柄AB转速n1=65r/min;
2)测试内容
一个运动循环内,从动曲柄CD的角位移θ、角速度ω与曲柄AB转角
关系,并给制θ-
、ω-
图。
改变构件尺度参数后,再进行测试。
(自选)
3)实验步骤
①实验原理图:
双曲柄机构实验原理图
②实验步骤:
1.确定所选机构中构件的尺寸(先选第一组数据),正确搭接机构;
2.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;。
5.调整曲柄长度为35mm重复第三项内容;
6.整理实验各项数据,填写实验报告;
7.实验报告填写前应事先根据已知尺寸算出θ、ω的值并画出运动线图。
4)问题讨论
①改变机构中其它杆件尺寸,从动件运动规律是否发生变化?
②双曲柄机构有哪几种特性?
③实验的测试数据和计算数值,误差多大?
有哪些影响因素?
4、摆动导杆机构实验
1)被测对象基本参数
摆动导杆机构如图所示,各杆长度如下:
曲柄lAB=50mm(35mm);机架lAC=150mm;曲柄转速n1=65r/min;
2)测试内容
一个运动循环内,摆杆角位移θ、角速度ω和角加速度ε与机构位置(曲柄转角
)之间关系,并给制θ-
、ω-
和ε-
线图。
改变构件尺度参数后,再进行测试。
3)实验步骤
①实验原理图:
摆动导杆机构实验原理图
②实验步骤:
1.确定所选机构中构件的尺寸,正确搭接机构;
2.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
5.调整曲柄长度,重复第三项内容。
6.分别整理实验各项运动曲线,填写实验报告。
7.实验报告填写前应事先根据已知尺寸算出θ、ω、ε的值并画出当曲柄每30°时的运动线图。
4)问题讨论
①改变曲柄尺寸从动件运动规律是否发生变化?
为什么?
②实验的测试数据和计算数值,有哪些误差的影响因素?
5、直动从动件凸轮机构实验
1)被测对象基本参数
直动凸轮机构如图所示,各参数如下:
对心式:
基圆半径ro=40mm;行程:
h=20mm;
推杆的推程、回程均为等加等减速运动规律。
推程运动角Φ=150°;远休止角Φs=30°;
回程运动角Φ’=150°;近休止角Φ’s=30°。
凸轮转速:
n1=35r/min;偏距e=20mm(自选);
2)测试内容
一个运动循环内,从动推杆的位移S、速度和加速度a与机构位置(凸轮转角
)之间关系,并绘制S-
、v-
和a-
运动线图。
改变构件尺度参数后,再进行测试。
(自选)
3)实验步骤
①实验原理图:
直动从动件凸轮机构实验原理图
②实验步骤:
a.正确搭接机构;
b.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
c.打开计算机电源运行采集程序;
d.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
e.对机构进行调整使之变为偏心距为e=20的偏置凸轮机构,(可左偏、右偏)比较从动件运动规律的变化,重复第三项内容进行测试;
f.更换从动构件型式(换为平底和滚子),重复第三项内容进行测试;(自选)
g.整理实验各项运动曲线,填写实验报告。
4)问题讨论
①改变从动构件后,从动件运动规律是否发生变化?
为什么?
②实验的测试数据和计算数值,误差多大?
有哪些影响因素?
6、摆动从动件凸轮机构实验
1)被测对象基本参数
摆动从动件凸轮机构如图所示,各参数如下:
从动件最大摆角
=30°;
摆杆推程的运动方向与凸轮的转向相反。
基圆半径r0=40mm;凸轮的升程运动角Φ=150°;
远休止角Φs=30°;
回程运动角Φ’=120°;
摆杆升程、回程均为等加等减速运动规律;
摆杆长lAB=165mm,初位角
=30°,凸轮转速n1=35r/min。
2)测试内容
一个运动循环内,摆杆的角位移θ、角速度ω和角加速度ε的实测值及其相应的θ-
、ω-
和ε-
线图。
更换摆杆形式后,再进行测试。
(自选)
3)实验步骤
①实验原理图:
摆动从动件凸轮机构实验原理图
②实验步骤:
1.正确搭接机构;
2.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
5.更换从动构件型式(换为平底和滚子),重复第三项内容进行测试(自选)。
6.整理实验各项运动曲线,填写实验报告。
4)问题讨论
①改变从动构件后,从动件运动规律是否发生变化?
为什么?
②实验的测试数据和计算数值,误差多大?
有哪些影响因素?
7、平面六杆机构实验
1)被测对象基本参数
六杆机构如图所示,各杆长度如下:
主动曲柄LAB=50mm(35mm);
连杆LBC=90mm(30mm);
从动曲柄LCD=90mm(50mm);
连杆LCE=160mm;机架LAD=30mm;
曲柄转速n1=65r/min;
2)测试内容
①一个运动循环内,滑块位移S、速度v和加速度a的与机构位置(曲柄转角
)之间关系,并绘制S-
、v-
和a-
线图。
②一个运动循环内,曲柄CD的角位移θ、角速度ω和角加速度ε与曲柄AB转角
关系,并给出θ-
、ω-
和ε-
线图。
改变构件尺度参数后,再进行测试。
3)实验步骤
①实验原理图:
六杆机构实验原理图
②实验步骤:
原始各构件尺寸
曲柄50mm,连杆90mm,从动曲柄90mm,机架30mm,滑块连杆60mm,n1=65r/min;
1.正确搭接机构;
2.按实验测试原理图连接计算机与控制箱,仔细检查实验线路是否正确;
3.打开计算机,运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
5.调整曲柄长度35mm、或连杆长L=30、或滑块偏心e=20mm,分别重复第三项内容进行测试;
6.整理实验各项运动曲线,填写实验报告;
7.实验报告填写前应事先根据已知尺寸算出S、v、a和θ、ω、ε的值,并画出运动线图。
4)问题讨论
①改变机构中其它构件尺寸,从动件运动规律是否发生变化?
为什么?
②双曲柄机构有几种特性?
不同类型对执行构件滑块的运动规律有无影响?
为什么?
③实验的测试数据和计算数值,误差多大?
有哪些影响因素?
机构运动参数测试实验报告
班级、学号
姓名
实验日期
同组人员
指导教师
成绩
一、实验目的
二、被测对象名称、原始数据及检试项目;
三、实验装置原理框图;
四、根据机构尺寸计算的理论值(计算公式及结果);
五、实验数据记录及结果(建议以表格及线图形式表达);
六、实验结果分析(如误差产生原因分析等);
七、实验问题讨论及收获;
 升级会员
升级会员 