电子竞赛重庆赛区369解析.docx
《电子竞赛重庆赛区369解析.docx》由会员分享,可在线阅读,更多相关《电子竞赛重庆赛区369解析.docx(11页珍藏版)》请在冰豆网上搜索。
电子竞赛重庆赛区369解析
小球滚动控制系统
[高职高专组]
摘要
本设计基于STM32单片机为主控芯片,通过对主控系统、位置信息感知系统、驱动单元等模块进行设计与调试,实现了一个小球滚动控制系统。
该系统主要通过直流减速电机、PID算法、角度传感器MPU6050、光电传感器、红外遥控器等系列操作控制,能自动获取小球的位置和速度信息,根据设计好的运动控制算法改变U型导轨倾角,保证小球稳定运动并停在任意给定参考位置上,完成小球的规定动作。
关键字:
STM32;直流减速电机;光电传感器;PID算法;角度传感器
一.方案论证
1.电机控制
方案一:
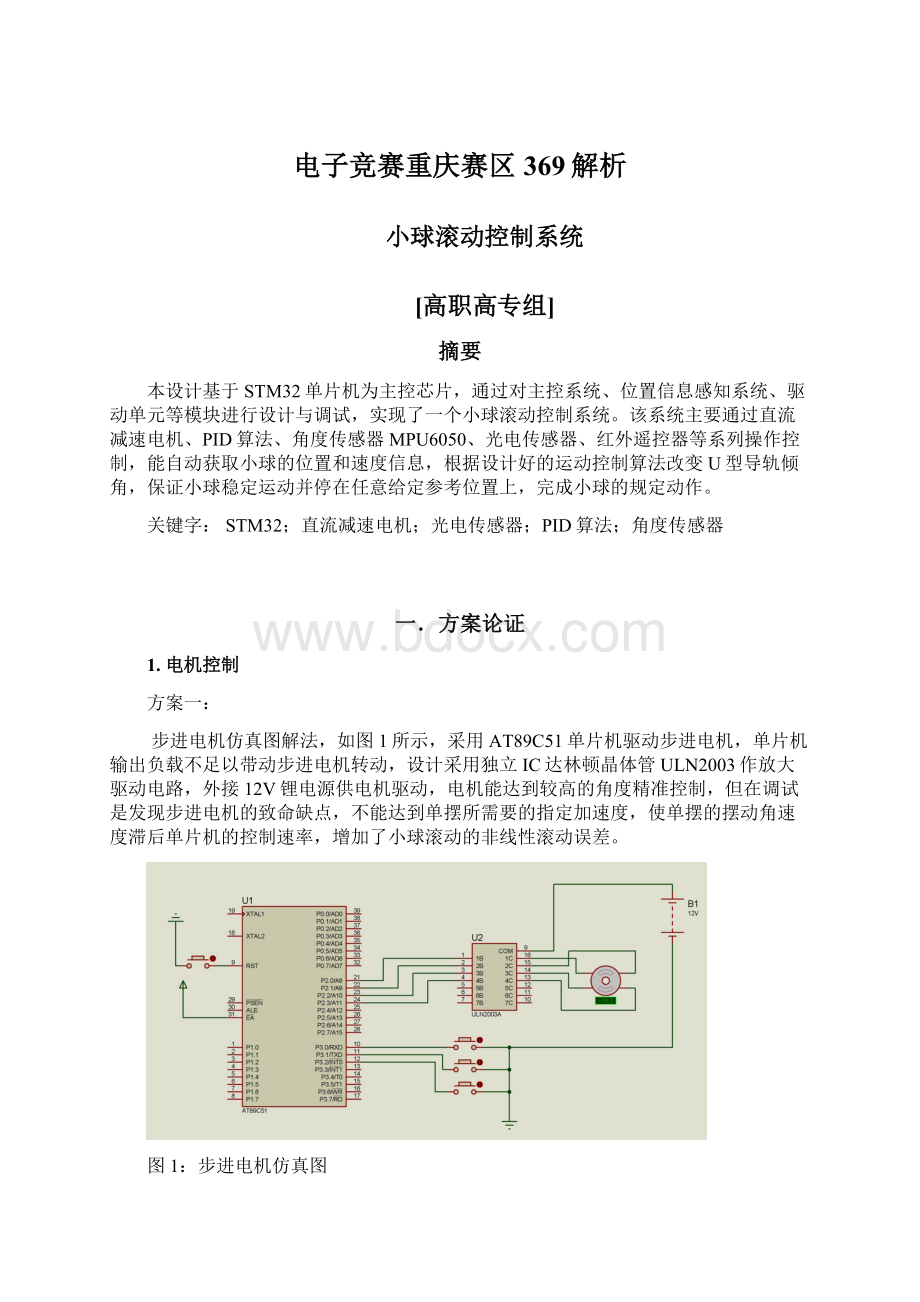
步进电机仿真图解法,如图1所示,采用AT89C51单片机驱动步进电机,单片机输出负载不足以带动步进电机转动,设计采用独立IC达林顿晶体管ULN2003作放大驱动电路,外接12V锂电源供电机驱动,电机能达到较高的角度精准控制,但在调试是发现步进电机的致命缺点,不能达到单摆所需要的指定加速度,使单摆的摆动角速度滞后单片机的控制速率,增加了小球滚动的非线性滚动误差。
图1:
步进电机仿真图
方案二:
直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。
齿轮减速箱的作用是,提供较低的转速,较大的力矩。
同时,齿轮箱不同的减速比可以提供不同的转速和力矩。
这大大提高了,直流电机在自动化行业中的使用率。
减速电机是指减速机和电机(马达)的集成体[1]。
经综合考虑,我们方案最终采用14V,4W减速直流电机,该电机搭载自编码可调参数,通过PWM控制电机的正反转,考虑U型导管和导管上的滚珠、传感器较多,负重较大,普通直流电机不能带动U型导轨的上下运动,而减速直流电机自身通过内部齿轮增大电机扭矩,大大增加了电机的负重量,通过红外遥控器的,拉动U型导轨做上下摆动,使玻璃小球滚动到指定位置。
2.角度传感器
我们采用的是MPU-6000(6050)角度传感器,其角速度全格感测范围为±250、±500、±1000与±2000°/sec(dps),可准确追踪快速与慢速动作,并且,用户可程式控制的加速器全格感测范围为±2g、±4g±8g与±16g。
产品传输可透过最高至400kHz的IC或最高达20MHz的SPI(MPU-6050没有SPI)。
MPU-6000可在不同电压下工作,VDD供电电压介为2.5V±5%、3.0V±5%或3.3V±5%,逻辑接口VVDIO供电为1.8V±5%(MPU6000仅用VDD),可用I2C接口连接一个第三方的数字传感器,MPU-60X0 对陀螺仪和加速度计分别用了三个16 位的ADC,将其测量的模拟量转化为可输出的数字量。
3.光电传感器
方案一
采用简洁模块式反射式光电传感器,以光电器件作为转换元件的传感器[2]。
它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等,具有非接触、响应快、性能可靠等特点,通过电位器旋钮,2CM--30CM可控测距,抗干扰能力强,工作电压3.5V--5V,输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器,可采用VCC-VCC;GND-GND;OUT-TO。
如图2所示反射式光电传感器。
图2:
反射式光电传感器电路
方案二:
对射型光电传感器,基本组成发送器,接收器和检测电路三部分构成,对射式是把发光器和收光器分离开,就可使检测距离加大,但是本实验却是在短距离集中测距,对射式在传送信息时容易发生散光,采集信息产生误差,对射式光电传感器是分离的发射器和接收器,在U型导轨上不便于安装和调试,而模块式反射光电传感器采用一体化设计,只需在导管的一边安装即可,减少安装工作还大大减小实验误差,所以觉得方案一更合理。
4.按键
机械式点动按键连接转轴支架上,必然增加支杆重量和不便于手动操作性,而红外遥控器重量轻便于携带,其本身具有一个学习/控制复用键、5~10个设备选择键,10~20个功能控制键,由一个设备选择键与各个功能控制键共同实现对一个设备的控制,程序上载波频率通常为38K。
载波是电信号去驱动红外发光二极管,将电信号变成光信号发射出去,这就是红外光,波长范围在840nm到960nm之间。
在接收端,需要反过来通过光电二极管将红外线光信号转成电信号,经放大、整形、解调等步骤,最后还原成原来的脉冲编码信号。
二.理论分析与参数计算
小球滚动控制系统装置,主要由放置在U型导轨上的小球和驱动转盘组成。
随着转盘的转动,横梁的倾斜角度发生变化,小球在重力的作用下沿U型导轨自由滚动。
系统控制的目标是设计一个反馈控制系统调节驱动盘的转动角度,从而控制小球在U型导轨上的位置。
由于系统建模中的一些不确定性和系统的不稳定性因素,如何将小球定位在U型导轨的任意指定位置上,是一个比较困难的问题,系统的精确数学模型难以建立而且比较复杂,需要进行简化,建立简化的数学模型。
通过对小球滚动控制系统控制结构分析,将系统分为机械部分和驱动部分加以建模。
1.球杆系统的机械模型
球杆定位控制系统是一个经典控制理论教学模型[1],它具有物理模型简单、概念清晰、便于用控制理论算法进行的特点,此次设计给出一个相对简单的模型。
球杆系统的机械原理图如图3所示。
图3:
球杆系统的机械图
根据牛顿运动定律,小球在梁上滚动的动力学方程为
其中,g为重力加速度;m为小球的质量;J为小球的瞬时转动惯量;r为小球在U型导轨上的位置;R为小球的半径。
2.角度模型
在实际控制过程中,连杆与水平面之间的夹角为θ,是由直流伺服电机的转角输出实现,在U型导轨的倾斜角α角度小范围变化时,α和θ之间近似有如下关系成立:
3.PID设计原理
工程中,应用最为广泛的调节器控制规律为比例、积分、微分三种原理控制,简称PID控制,又称PID调节。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例控制:
是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,当仅有比例控制时系统输出存在稳态误差,在实验中添加P控制后,系统并不能稳定,改变Kp的值后,系统还是不能稳定,可以看出,对于一个惯性系统,在P控制作用下,可以使系统保持一个等幅振荡。
积分控制:
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大,这样,即便误差很小,积分项也会随着时间的增加而增大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分控制器,可以使系统在进入稳态后无稳态误差。
微分控制:
微分项能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提起使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调,所以对有较大惯性或滞后的被控对象,比例+微分控制器能改善系统在调节过程中的动态特性。
对于小球滚动控制系统,许多系统参数由于无法确定精确的取值,只能确定其可能的变化区间。
为简化模型,避免给设计带来不必要的麻烦,将
近似为1,根据系统建模相关分析结果,系统参数变化范围1≤c≤2,而对于系统未建模时延特性,综合考虑小球系统、执行机构和传感器等因素,被控对象的传递函数包含时延环节e-sT,且0≤T≤01。
控制系统设计的任务是确定控制器结构和调节控制器参数,以获得“最优”系统性能。
小球滚动控制系统设计的控制指标如下:
在参数c的摄动下,始终保持系统的阶跃响应具有最佳ITAE性能[5],调节时间t<2s(动态系统过渡过程时间,2%准则),超调量小于2%,并且在未建模时滞环节影响下,控制系统依然能保持稳定。
首先,PID控制器的设计过程可分为3步:
1)根据对调节时间的设计要求,确定闭环系统的固有频率ωn;
2)根据最佳闭环传递函数以及ωn,确定PID控制器的3个参数,得到Gc(s);
3)确定合适的前置滤波器Gp(s),满足系统对阶跃响应的ITAE性能指标最小。
设采用PID控制器:
当Gp(s)=1时,校正后的闭环传递函数为
采用ITAE指标时,最优特征多项式为
为满足达到预期的调节时间,将ωn的初始值选为ωn=5,并按c=1来确定ITAE系数,经计算后,不包含前置滤波器的闭环系统为
所采用的控制器应为
取前置滤波器为
从而ITAE意义下的最优传递函数为
其次,对于系统存在的未建模时滞特性,根据小增益定理(smallgaintheorem)[6],如果存在W(s)满足对所有ω以及T1则控制系统在未建模时滞环节e-sT(其中T1针对设计要求的0≤T≤011,粗选W(s)函数,反复调整参数,直至找到一个合适的W(s)函数,以保证控制系统在未建模时滞环节e-sT影响下,系统能稳定。
三.系统各电路设计
1、主控芯片
根据设计要求,此次设计采用RAM嵌入式STM32为核心的单片机,144IO两个独立时钟源采取分频与倍频采样,主控电机驱动板、方向传感器、光电传感器等多种外设。
14V直流电流源通过lm7805降压模块满足单片机和直流电机供电。
主控板电路图如图4所示。
图4:
主控板电路图
2、电机驱动部分
直流减速电机,14V电源直接供电,外接L298N驱动模块采用恒压恒流乔式H型,驱动电机正反转,电流可达2A,额定功率可达25W,使芯片不发烫的情况下保证电机的正常工作,稳定性增加,电机用铝皮固定在刚性支架上,带动电机前置滚轮转动,通过程序控制PWM调节转速大小。
当PWM调节好电机转动角度的同时,通过PID算法的提前预测并控制调节,使电机达到程序设定偏转角度,提高U型导轨的转动精确度。
电机调试过程中截图,如图5(a)(b)(c)。
图5:
PWM调试代码(a)
图5:
PWM调试示波器采样(a)
图5:
PWM调试示波器采样(c)
3.传感器的电路设计
根据项目要求,本设计采用了光电传感器、角度传感器、红外遥控等传感器。
其中光电传感器主要用于测试小球位置,角度传感器主要是测量U型导轨倾斜度,红外遥控主要当作按键使用。
3.1光电传感器
光电传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管[4],发射管发射出一定频率的红外线,当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
为了更好精确小玻璃球的位置信息,U导轨固定在矩形木板上,光电传感器则可以通过导轨过孔感知小球的运动轨迹,当小球经过导轨时,光电传感器通过内部高低电平变化,通过自身双电压比较器集成电路,采集到小球个数并传递给单片机处理。
光电传感器模块电路图如图6所示。
图6:
光电传感器模块电路图
3.2角度传感器
MPU6050角度传感器,单总线协议I2C通信,信息从EEPROM里面存储和读取信息,这儿采用DMP驱动模块采集U型导轨的位置信息,它是STM32官方库里面的驱动引擎,直接输出四元数,可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合,单片机采集角度传感器传回的位置信息,通过PWM调速,PID控制反馈给电机。
图7:
角度传感器电路
角度传感器部分程序:
四.系统调试和测试结果
1.测试方法:
固定好支架,单片机和各支路的电气连接,通过单片机键盘初步调试电机转动角度大小和正反转,通过上位机串口调试助手调试角度传感器的的摆放位置(U型导轨的水平位置)计算U型导轨的偏转角度与电机偏转角度的关系,通过PWM调节电机的转动加速度进行整机测试。
2.测试结果:
<1>、程序下载至单片机,电源开启,小球放置起始位置,通过遥控调节电机正常转动,小球滚动至U型导轨两边,光电传感器模块上LED灯点亮,报警蜂鸣器发声,电气属性正常。
<2>、电源开启,将U型导轨放置正负15度的任意位置,按键开关按下,电机带动U型导轨至水平位置静止,将玻璃小球放置U型导轨25CM—35CM处静止不滚动,电气属性正常。
<3>、电源开启,玻璃小球放置原点位置,按键开关按下,小球通过U型导轨的倾斜施加的加速度带动小球来回转动,在5CM-55CM内完成指定动作,用时11秒,电气属性正常。
<4>、电源开启,玻璃小球在往返运动状态下,红外遥控控制开关按下,通过电机调速,使玻璃小球在往返运动中找到最佳停顿位置,小球停止于30正负2CM位置内,用时13秒,电气属性正常。
参考文献
[1]边敏,小球-滑板系统建模与鲁棒控制器设计[J],北京印刷学院学报,2007(03);
[2]何朕,王毅等,球-杆系统的非线性问题[J],自动化学报,2007(05);
[3]傅彩芬,球杆系统的自抗扰控制[J],自动化与仪器仪表,2015(07);
[4]绪方胜彦,现代控制工程[M],北京,清华大学出版社,2006;
[5]Dorf,RichardC,现代控制系统[M],北京,高等教育出版社,2003。
 升级会员
升级会员 