范文门机调试方法doc.docx
《范文门机调试方法doc.docx》由会员分享,可在线阅读,更多相关《范文门机调试方法doc.docx(13页珍藏版)》请在冰豆网上搜索。
范文门机调试方法doc
蒙德电气伺服门机控制器IMS-DS20P2B系列详细调试方法补充说明
具体按键说明请参照说明书
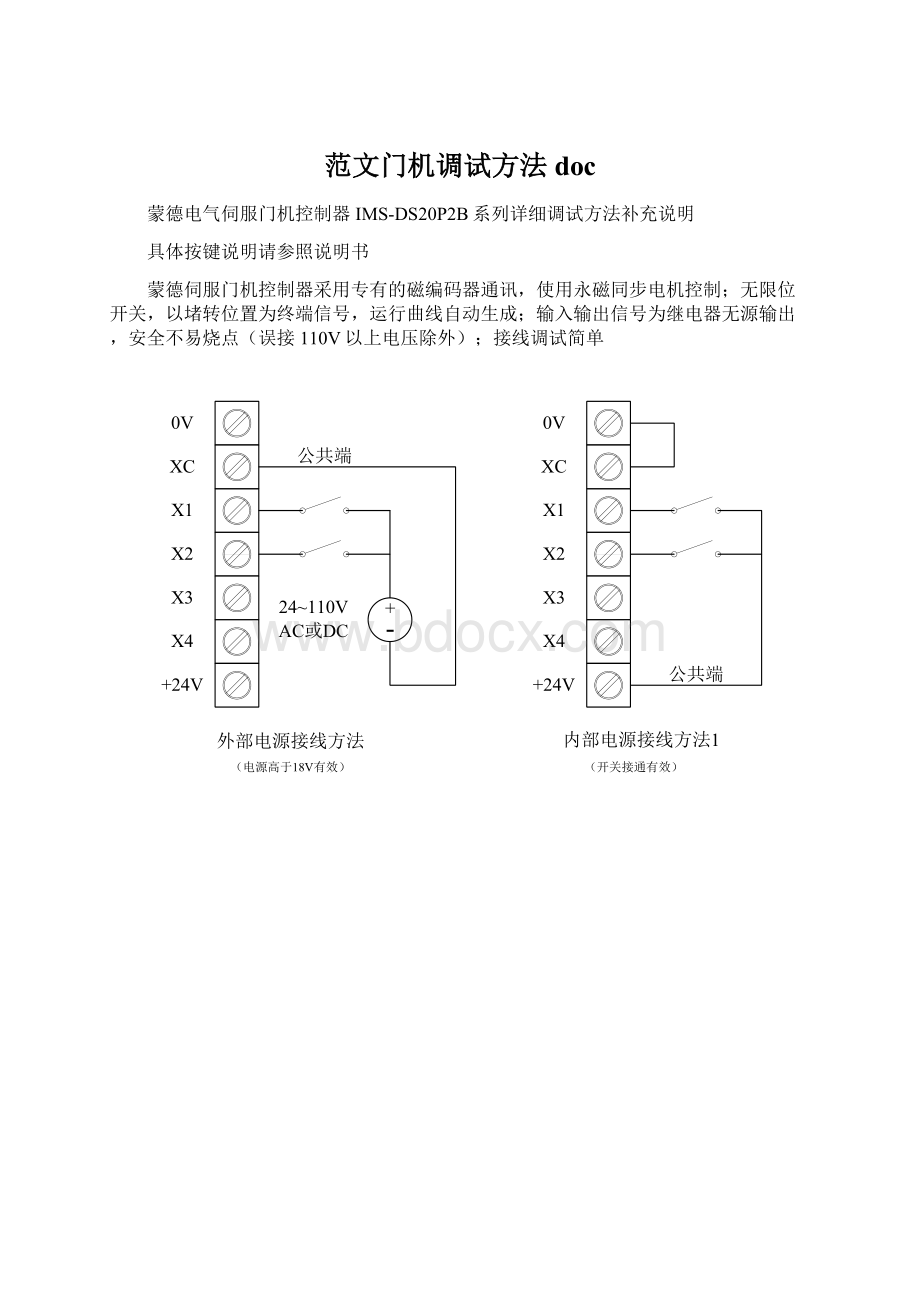
蒙德伺服门机控制器采用专有的磁编码器通讯,使用永磁同步电机控制;无限位开关,以堵转位置为终端信号,运行曲线自动生成;输入输出信号为继电器无源输出,安全不易烧点(误接110V以上电压除外);接线调试简单
情况1:
无操作器时运行调试方法(出厂默认配置时,新机,已调试好后出现运行不当或不能运行)
1.上电前确保sw2开关拨到on位置(试运行模式)后再上电。
1
2.把sw3开关拨到off(选择自学习磁极模式),按下自学习按钮进行电机磁极自学习,此时ready/error灯亮,当驱动器面板上ready/error灯熄灭即完成。
2
3.把sw3开关拨到on(选择自学习门宽模式),按下自学习按钮后应作开关门动作,关门到位后完成,至此驱动器应能正常工作。
3
4.若要回到系统中正常运行则把sw2开关拨到off位置。
5.开/关门速度调整电位器旋钮OPENSPEED/CLOSESPEED。
运行到终端时的保持力矩大小调整电位器旋钮HOLD。
门板堵转力大小调整电位器旋钮OBSTRUCTION。
注1:
若上电后驱动器ready/error灯闪烁,请检查是否未接编码器;若POWER高压灯不亮,驱动器有故障,请与厂家联系。
注2:
此过程若出现ready/error灯闪烁,则可能为编码器(干扰、通讯故障等)或电机(缺相等)有问题。
检查接线正确且没有断线或更换编码器后再学习。
注3:
若没有开关门动作,然后ready/error灯闪烁,则门宽自学习错误。
重新上电后可尝试重新自学习电机磁极和把堵转电位器旋钮OBSTRUCTION向+方向旋转,加大堵转力矩的检测。
若只开门后没有关门,则把SW1拨到相反方向即可。
情况2:
带操作器时运行调试方法(舒适感等高级调试)
说明:
若按傻瓜调试方法操作后都无法正常运行,或舒适感不佳,则需要使用操作器查看驱动器报的故障码和调试。
1.上电后就跳故障的处理方法
●OPE1故障步骤:
按确定键——按返回键到OP1菜单——按上或下键到OP7菜单——按确定键进入(显示0)——按确定键(0闪烁)——按确定(显示Er---)完成——重新上电后确定故障是否存在——若存在重复一次即可
●OPE8故障步骤:
按确定键——按返回键到OP1菜单——按上或下键到OP4菜单——按确定键进入(显示0或100)——按确定键(闪烁)——按确定(显示Er---)完成——重新上电后确定故障是否存在——若存在重复一次即可
●PGF2故障:
未插上编码器插头/编码器线断线/编码器损坏/驱动器故障。
请依次排除原因即可。
若更换编码器后仍有问题请与厂家联系。
2.电机磁角度自学习时跳故障的处理方法
通过自学习按钮或操作器使用OP3=3均可以进行磁极自学习,出现故障时请检查电机端(编码器断线,电机接线,电机问题等)是否有问题,可尝试用新电机(带编码器)替换。
可通过U2.06查看脉冲是否有变化。
若故障未能排除,可尝试用操作器初始化参数(OP4=0)后再自学习。
仍有故障请与厂家联系。
3.门宽自学习时PRE3-5故障的处理方法
●情况一是磁角度没学好或编码器有问题。
请检查磁编码器(电机端)有无松动,可重新再进行磁极自学习,自学习完成后可通过H5.07查看每次学习完成后的角度,一般两次或多次自学习后相差10.0度内都是允许的。
另外要看U2.06编码器脉冲变化,拉动轿门让电机旋转,此时U2.06会有相对应的变化,若无则编码器肯定有故障。
●情况二是力矩到达上限,负载重或阻力大。
此时应先检查轿门是否有摩擦问题,尽量使门的工作处于顺畅状态,然后可把驱动器面板上的堵转力矩调整电位器旋钮向+(顺时针)方向调整(越大越难堵转)后再学习门宽看是否有效,一般不是太重的门都应该有效果,若调到最大而开门动作仍运行一小段距离后跳故障,则把P5.01(输出力矩上限)和P5.03(堵转力矩上限)相应调大即可。
●情况三,若上两种情况均无效时,请尝试使用OP4=100初始化参数后再重新按以上情况调试。
仍无法调试请尝试替换驱动器或电机,并与厂家联系。
4.顺利通过电机自学习和门宽自学习后,请先使用试运行模式(SW2=ON)作进一步舒适感等调试,直到调试完成后切换回正常模式(SW2=OFF)。
●按试运行按钮就可以进行开关门动作。
第一次按试运行按钮,驱动器上的CLOSE灯亮,1再按一次则作开门动作,离开终端区域后CLOSE灯熄灭,开门到位后OPEN灯亮并保持不动;再按一次则作关门动作,离开终端区域后OPEN灯熄灭,关门到位后CLOSE灯亮并保持。
至此完成一次开关门动作,以后每按一下则作相应一次动作,在此基础上进行其他调试。
2
注1:
第一次按是指上电的第一次,第一次按试运行按钮后驱动器是作校正运行动作,因此是不按曲线运行的。
若在关门终端区驱动器上的OPEN灯亮表明方向相反了,与“无操作器时运行调试方法”相同,把SW1拨到反方向即可,重新上电后生效。
注2:
运行中RUN灯亮时是不能更改参数的,注意操作器的RUN和STOP灯状态。
P4.07断电延时参数会影响关门终端区保持电机力矩的时间,因此此时间越长,即使已经关好门,也需要经过它的时间后驱动器才会停止对电机运行。
参数修改后请习惯性的按一下STOP键复位。
●确定门机类型是同步门刀还是异步门刀,对应驱动器功能参数P1.06,为0是同步,1是异步。
出厂值为0。
●确定收放门刀距离,对应参数P2.04(单位是mm)。
无论同步或异步门刀,视乎厅门什么时候刚好合上。
这是舒适感曲线的重要调整参数之一,也是调整轿门是否撞门的重要参数。
出厂值为45,一般把数值调小则走高速的距离长一点。
●调整关门蠕动距离,对应参数P2.06(单位是mm)。
参数越大关门蠕动距离越长。
它的对应蠕动速度调整参数为P3.02。
●对于同步门刀需要调整门刀收放快慢的,可以调整参数P4.06,数值越小则越快。
●需要调整开关门速度的,可以调整驱动器上的电位器旋钮OPEN和CLOSE,F方向为快,S方向为慢。
最大速度阀值对应参数P3.01,实际运行速度受驱动器最高输出频率D2.01限制,一般默认即可。
●经过以上调整后,基本完成舒适感调试,然后用试运行来观看效果,以上每一个步骤都可以单独调整,但也要配合起来调试。
3
注3:
以上步骤应带厅门进行调试,若经过以上调整后不能改善下列情况者,可尝试调整驱动器增益跟积分参数。
如(关门到位差几公分撞门,开门有回弹或者轻微撞门,开关门感觉慢像没力等)这些情况都是电机跟随性能的影响,增益参数E5.01—E5.03(分别是高速,低速,启动增益)在电机不震的情况下加大,积分参数E5.04—E5.06(分别是高速,低速,启动积分)在电机不震的情况下减小。
请按实际分别调整,下面仅给出一组经验参数作参考,不代表均有效。
(E5.01=8,E5.02=8,E5.03=8,E5.04=20,E5.05=12,E5.06=16)
●调整力矩参数。
如开门过程中有开不到位或开得很慢没有减速并撞门的情况1,排除有重物堵转,厅门重需克服摩擦等情况下加大电机输出力矩,对应参数调整P5.01,建议在能正常开关门的情况下减小数值,由于输出扭矩越大电机发热相对越大,影响电机寿命。
●在P5.01的基础上,若感觉关门力量不够可调整关门力矩上限,对应参数P5.06,数值越大力越大。
●设定开关门到位、堵转等情况时的保持力距,对应参数P5.02为保持力矩上限,可根据P5.01设定上限值,实际设定为驱动器上的保持力矩旋钮,+方向为最大,-方向为最小。
●设定堵转力矩上限,对应参数P5.03,实际设定为驱动器上的堵转力矩旋钮,+方向为最大,-方向为最小。
同时P5.04为堵转灵敏度调整,数值越大灵敏度越低。
注:
以上力矩调试应按所需力量实测来调整,默认参数正常使用下可不用更改。
注1:
所描述的情况只在P1.10=0时(开门堵转检出功能为关)才出现,若P1.10=1,则受到较大阻力堵转后会即时被驱动器处理为堵转并输出堵转信号,以保持力矩停在堵转位置,此时需接收到关门信号才撤销堵转保护。
因此确定非人为使开门受堵转情况下,增大P5.01即可。
5.正常运行时的开关门问题及使用技巧
●使用U2.01端子监视观察开关门信号及到位信号是否有输出。
●监视U1.06力矩百分比的变化,P5.01为输出力矩上限,P5.02为保持力矩上限,如果出力不够或者有摩擦,肯定U1.06会在没有到位前就变成P5.01的值;开关门到位后最后U1.06会显示P5.02*保持力矩电位器旋钮%的值,稳定后通过扭动旋钮可以设置实际保持力矩输出值。
●可观察U2.06编码器脉冲是否正常变化,U2.07脉冲干扰值来判断编码器工作是否正常。
若U2.06为0.0000且转动电机后没有变化可确定存在问题,在0到4096之间变化不正常时同理,运行时U2.07数值一般个位数6以下,越大证明干扰或故障率越高。
●主动模式及被动模式,开关门曲线调整说明:
拨码开关4(主动模式ON/非主动模式OFF)
主动模式时,当关门受堵后会驱动器自身作重开门动作,开门到位后,接收上位机信号作保持或再次关门,这时当P1.07记忆点功能为有效,则到记忆处减速越过处理,否则正常关门。
非主动模式时,堵转后堵转灯长亮,门机给出堵转信号并停止不动,等待上位机给出开门信号作开门动作,当门机接收到开门信号后撤销堵转信号。
关门曲线调整(慢,快,撞门)
关门曲线相关调整参数有P2.04收放门刀距离,P2.06关门蠕动距离,P3.02蠕动速度%(开关门均有影响),P5.06关门力矩上限%,P2.02校正距离(影响到位信号,开关门均有影响),电位器旋钮2(关门速度)
开门曲线调整(撞门,反弹)
开门曲线相关调整参数有,P2.01门宽值(开门撞门),P3.02蠕动速度%(开关门均有影响),P2.02校正距离(影响到位信号,开关门均有影响),P4.05停止延时(开关门均有影响),P5.01最大力矩上限,P5.02保持力矩,电位器旋钮1(开门速度),电位器旋钮3(保持力矩)
附录(P参数详细说明)
P1.基本参数
P1.01显示当前位置
说明:
假设门宽为800mm,则开门到位终端处显示0,关门到位终端处显示400
P1.02开关门次数
说明:
开关门的计数显示,每次关门到位或开门到位加1
P1.03带轮直径(0.1mm)
说明:
设定电机主轴套的带轮直径,此参数会影响自学习门宽的值和角速度,影响驱动器最高速度的设定,数值越大自学习后换算门宽值越小。
P1.04减速比
说明:
减速比参数会影响自学习门宽的值,如果在相同实际门宽距离下,减速比数值越大,轿门移动相同距离时,门机将认为只有除以该减速比值的距离。
(表现为快速撞门)
P1.05电机类型(默认值3)
说明:
显示当前电机类型并且可修改电机类型,不同的电机类型对应各自电机参数,修改后复位生效(一般对应用默认电机),自动输入对应的电机参数
P1.06门刀类型选择
说明:
0为同步门刀,1为异步门刀。
此参数是设置门刀的动作模式,即同步门刀动作模式或异步门刀动作模式。
不同的门刀类型原则上应对应各自的门刀动作模式,两种模式的运行曲线见下图
P1.07障碍点记忆功能选择
说明:
①关门堵转时,在非主动模式下,如障碍点记忆功能使能有效(P1.07=1),则系统在下次关门时在障碍点减速继续关门,如下图。
越过障碍点后系统自动清障碍点记忆。
②开门堵转时,P1.10设置为1上位机有处理堵转信号时,如P1.07=1障碍点记忆功能使能有效,则系统在接收到关门信号时在障碍点处作关门动作,如下图。
越过障碍点后系统自动清障碍点记忆。
P1.08演示模式功能选择
说明:
设置了演示模式后按下试运行按钮后门机自动作开关门动作,断电复位
P1.09上电自动关门功能选择
说明:
初始校正。
驱动器每次在运行中停电后上电均需要位置初始校正。
未校正时驱动器也可以按照开关门信号运转,但速度限于校正速度,走到堵转位置完成校正过程。
位置初始校正可以在没有外部开关门信号的情况下自动完成,将主动校正使能(P1.09)设置为1,则上电后在外部开关门信号的情况下自动关门校正。
在主动校正有效的情况下,外部开门信号优先于主动校正。
试运行模式下主动校正无效。
(1)主动校正(P1.09=1)
图没有外部信号校正
图有外部信号校正
外部信号为关门信号逻辑类同没有外部信号校正
注:
堵转时校正计算开关门到位位置。
(2)外部信号校正(P1.09=0)
①关门初始校正
②开门初始校正
P1.10开门堵转检出功能
说明:
开门堵转检出功能无效时,当开门受堵后会保持力矩,直到撤销堵转力后继续开门。
有效时,堵转后堵转灯长亮,门机给出堵转信号并停止不动,直到上位机给出关门信号动作,当门机接收到关门信号后撤销堵转信号。
P2.工艺参数
P2.01自学习门宽(mm)
说明:
显示当前门宽的值。
可从驱动器自学习门机的门宽得到,也可手动修改,确认后需复位
P2.02校正距离(0.1mm)
说明:
开关门到位信号的有效距离,与上电校正有关。
数值越大,则到门终端距离越远,可能开门不到位;反之有可能撞门(必要时调整参数)
P2.03安全触板距离(mm)
说明:
安全触板开始短接位置到关门到位位置的距离,数值越大越早判断安全触板为接通状态
P2.04收放门刀距离
说明:
收放门刀动作的位移量,数值越大门刀越早进入放门刀动作,动作距离越长;反之动作越短。
影响开关门速度(重要参数)
P2.05皮带变形量
说明:
到达终端位置和电机堵转位置之差(自学习后获得初始值)
P2.06关门蠕动距离(0.1mm)
说明:
关门定位完成到开始放下门刀的距离,输出蠕动速度运行,影响关门速度(重要参数)
P3.速度参数
P3.01最高运行速度(m/s)
说明:
门板运行的最高线速度,数值越大速度越快
P3.02蠕动速度%
说明:
终端区里的运行(蠕动距离)速度,以P3.01的速度为100%
P3.03校正速度%
说明:
上电第一次运行校正位置及门宽自学习的速度,以P3.01的速度为100%
P4.时序参数
P4.01开门加速时间(S)
P4.02开门减速时间(S)
P4.03关门加速时间(S)
P4.04关门减速时间(S)
说明:
开关门曲线调节,时间越短速度越快
P4.05停止延时
说明:
在开关门终端位置撤消开关门信号后维持蠕动运行的时间,影响开关门曲线,数值越大,蠕动时间越长,反之越短(到位后停止时间也越长)
P4.06收放门刀加减速时间
说明:
门刀收放曲线调节,时间越长放门刀动作越慢,反之越迅速
P4.07输出停止延时
说明:
在关门到位位置撤消关门信号后到切断电机电流的延时时间,保持电机力矩延时时间防止门锁误断开,如设为“0”,则保持电机输出。
P4.08急停减速时间
说明:
在非终端位置断开控制信号信号或反转时的减速停止时间,时间越短停止或反转越迅速
P4.09力矩撤销时间
说明:
在关门到位位置电机输出力矩的撤销过程时间,影响关门力矩撤销响应速度,时间越长则缓缓撤销,反之急促。
P5.扭矩参数
P5.01动作扭矩限值%
说明:
开关门慢,不够力时调整
P5.02保持扭矩限值%
说明:
保持状态下的输出力矩不够或过大时适当调整。
P5.03关门堵转检出阀值%
说明:
数值越大越难堵转
P5.04堵转检出时间
说明:
开关门受堵后经过堵转检出时间判断是否误堵转,是调整堵转的灵敏度,时间越长灵敏度越低
P5.05校正超时阀值(0.1S)
说明:
当位置校正时间超过这个阀值,驱动器输出故障报警,防止由于可能电机故障或受堵引起的长时间校正
P5.06关门转矩上限衰减%
说明:
关门时输出力矩为P501的百分比
此手册仅对说明书作补充说明,其他参数及驱动器说明请参考说明书。
 升级会员
升级会员 