全国大学生电子设计竞赛 F题《帆板控制系统设计报告》.docx
《全国大学生电子设计竞赛 F题《帆板控制系统设计报告》.docx》由会员分享,可在线阅读,更多相关《全国大学生电子设计竞赛 F题《帆板控制系统设计报告》.docx(8页珍藏版)》请在冰豆网上搜索。
全国大学生电子设计竞赛F题《帆板控制系统设计报告》
帆板控制系统设计报告
摘要:
本设计以TI公司的超低功耗MCUMSP430处理器为核心,利用SCA61T高精度单轴倾角传感器的特性、外转子无刷电机强大驱动能力,形成一个闭环控制系统使帆板能更精准的转动规定的角度,并通过液晶实时显示出来。
也可通过按键操控控制风力大小,来控制转动的角度。
以该系统转动角度的准确性和完成任务的速度来判断该设计的完成指标。
关键词:
MSP430SCA61T外转子无刷电机帆板
一、系统框图
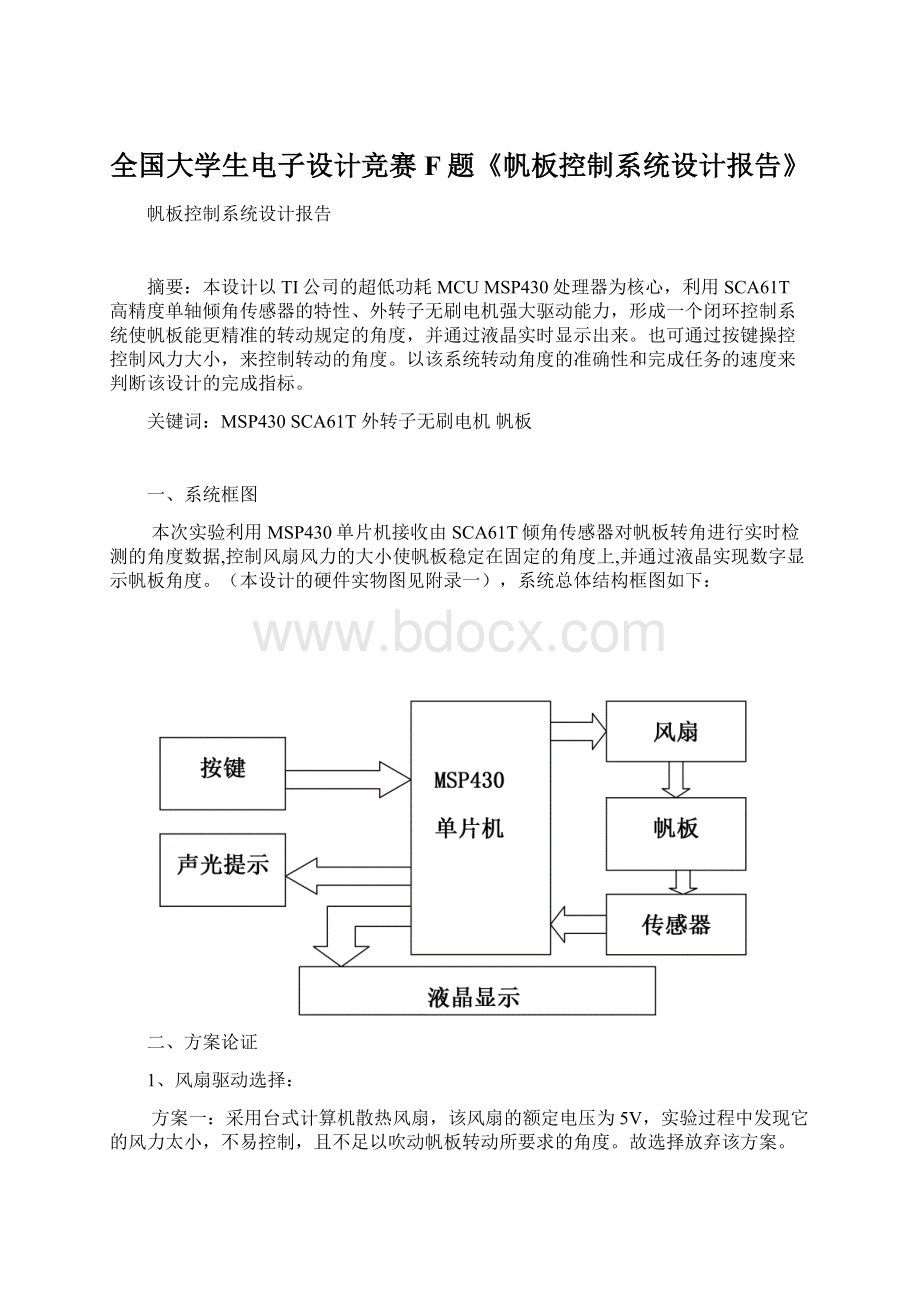
本次实验利用MSP430单片机接收由SCA61T倾角传感器对帆板转角进行实时检测的角度数据,控制风扇风力的大小使帆板稳定在固定的角度上,并通过液晶实现数字显示帆板角度。
(本设计的硬件实物图见附录一),系统总体结构框图如下:
二、方案论证
1、风扇驱动选择:
方案一:
采用台式计算机散热风扇,该风扇的额定电压为5V,实验过程中发现它的风力太小,不易控制,且不足以吹动帆板转动所要求的角度。
故选择放弃该方案。
方案二:
采用步进电机作为风扇驱动,因为每转过一个步距角的实际值与理论值存在着误差,不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
因此步进电机的转速很难精准的确定下来,因此,若选择该方案的话,对后面角度的计算将产生很大误差,故选择放弃该方案。
方案三:
采用外转子无刷电机作为风扇驱动,外转子无刷电机转速的可控性强,从每分钟几转到每分钟几万转都可以很容易实现,而且变速平稳、转速稳定、转速的线性度好。
外转子无刷电机的转动可以通过软件编程调整它的转速,而且外转子无刷电机带动风扇转动的风力大,实验过程中,发现它的风量完全足以使帆板转动题目所要求的最大角度,而且帆板转过一定角度后,稳定度也比较高。
故选择采用这种方案,来完成风扇控制系统。
2、帆板材料选择:
方案一:
采用轻质木板作为帆板,实验过程中,轻质木板只能勉强达到题目要求的60度,而且采用轻质木板,不便于装配倾角传感器。
故放弃该方案。
方案二:
采用纸板作为帆板,虽然具有取材便利和装配SCA61T倾角传感器方便的优势,但实验过程中,发现纸板质量太轻,转过的角度很难稳定住,故选择放弃该方案。
方案三:
采用塑料膜板,实验过程中,发现它完全能达到题目要求的最大角度60度,而且转过的角度稳定度也高,也能很好的解决如何装配SCA61T倾角传感器的问题。
故选择采用该方案。
3、电源控制器件选择:
方案一:
采用三端稳压器7805,作为电源驱动外转子无刷电机控制器件,虽然也能完成实验的各项要求。
但从电路的简单化、稳定性方面考虑,故放弃该方案。
方案二:
采用TI公司的LM317,LM317的输出电压范围是1.2V至37V,负载电流最大为1.5A。
而且它的使用非常简单,仅需两个外界电阻来设置输出电压。
此外,它的线性调整率和负载调整率也比标准的固定稳压器好。
因此选择LM317作为本设计的电源控制器件不仅能完美的完成基本部分也能完成发挥部分,且电路简单固定,操作方便,故选择该方案。
(电源稳压模块原理图见附录二)
4、角度检测模块选择:
方案一:
采用MMA7260三轴加速度传感器,它是一种可以对物体运动过程中的加速度进行测量的电子设备,典型互动应用中加速度传感器可以用来对物体的姿势或运动方向进行监测,根据物体运动和方向改变输出信号的电压值。
并且还具有低功耗、高灵敏度、设计稳定、防震能力强、成本低等等优势。
但是本次设计是要精准的测试帆板所转动的角度,若选用MMA7260三轴传感器,并不能很好的完成本次实验,故放弃该方案。
方案二:
采用高精度单轴SCA61T倾角传感器,它具有双输出接口;模拟电压输出和数字接口SPI接口。
还内置了温度传感器和EEPROM存储器,用于给倾角传感器做温度补偿和存储补偿数据使用;此外它还具有自我检测/验证引脚的功能,能通过此引脚(SELFTEST)检测传感器是否正常工作。
此外SCA61T倾角传感器,具有分辨率高、噪声低、稳定性好、抗冲击能力强、反应迅速等优点。
故选择该方案。
5、单片机最小系统MCU选择:
方案一:
采用80C51单片机,它是一款八位单片机,具有32个I/O引脚,2个定时、计数器,5个中断源等等优点,但对于本次设计来说,要实现全部功能,还远远不够还需要借助其他芯片的辅助,才能完成实验要求。
从节约成本和电路结构简单等等方面考虑,故放弃该方案。
方案二:
采用ATMEGAl6单片机,它是一款低功耗8位单片机,虽然它的性能比较好,并且也能完成实验要求,但他的价格比较贵,性价比不高。
经综合考虑,放弃该方案。
方案三:
采用MSP430单片机,它是一个16位的功能强大的超低功耗微处理器,特别适合于电池应用的场合,而且其集成度高,不需要加入其他的芯片进行辅助,就能完成本次设计的各项要求,同时MSP430有丰富的不同类型器件可供选择,给我们的设计带来了很大的灵活性,而且其性价比高。
经综合考虑,选择该方案。
三、理论分析与计算:
(1)外转子无刷电机工作原理:
外转子无刷电机由电机主体和驱动器组成,是一种典型的机电一体化产品。
电机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。
电机的转子上粘有已充磁的永磁体,为了检测电机转子的极性,在电机内装有位置传感器。
驱动器由功率电子器件和集成电路等构成,其功能是:
接受电机的启动、停止、制动信号,以控制电机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
外转子无刷电机的原理简图如图1所示:
图1
(2)外转子无刷电机转速控制与角度测量方法:
(3)SCA61T倾角传感器工作原理:
如图2是SCA61T的引脚分布图,各个引脚的功能如表1所示。
SCA61T有两种工作模式:
数字模式和模拟模式。
在数字模式下:
采用SPI接口(SCK,MISO,MOSI)进行读/写;在模拟模式下:
通过OUT引脚输出不同的电压值来对应不同的角度,并且引脚SCK、MISO、MOSI和CSB必须悬空。
对于本次设计只采用数字模式,图3是数字SPI连接方式,将SCK、MISO、MOSI和CSB引脚分别接到微控制器上,另外,由于对SCA61T进行一次读操作后得到的是11位数据,而标准的SPI接口一次读操作得到的是8位数据,所以必须采用软件模拟SPI接口,而不能直接将引脚接到微控制器的硬件SPI接口。
在数字SPI连接方式下,采用下式进行角度计算:
;
式中:
Dout是向SCA61T发送完“读x通道加速度值”命令RDAX后,从SCA61T读回的11位数值,LSB为从最低位开始的11位二进制数;Dout@0°为数字漂移值1024;snes为设备的灵敏读;所以要求得角度α就要知道Dout的值。
图2
表1
图3
四、系统硬件电路与程序设计
(1)度数检测部分
(2)度数与电机转速显示部分
通过按键来改变单片机I/O口所输出的PWM信号,调控电机的转速来改变帆板被吹动的角度,液晶把帆板所转动的角度和外转子无刷电机的转速实时的显示出来。
(3)风扇恒流控制部分
通过电桥来输出稳定可调的电压,使风扇能更均匀的转动,当输出电压在稳定下来之后,保持转速恒定不变。
从而使误差达到最小。
(电桥电路原理图见附录三)
(4)总控制部分
五、软件设计
由于本系统中单片机只起到控制输出和显示作用,所以软件设计比较简单,启动后进入角度测量,通过按键来控制单片机给外转子无刷电机驱动力的大小,并使用SCA61T倾角传感器来测量角度,然后所测得的角度反过来给单片机,最后通过单片机控制液晶显示出来,整个软件设计形成一个循环的控制系统。
(软件流程图见附录四)
六、测试方法与过程
七、总结
综合上述的测试结果,本设计不仅圆满地完成了题目的基本要求,还完美的完成了发挥部分的要求。
使用的MSP430和SCA61T高精度单轴倾角传感器大大的提高了本设计的灵敏度和精确度。
经过紧张激烈的四天三夜我们终于完成了本次设计,通过这次比赛,我们学到了很多东西,对以后的人生有着相当重要的意义。
最后,十分感谢学校的培养和全国电子设计竞赛组委会给予我们这次锻炼的机会。
这必将是我们人生中最宝贵的“财富”。
八、附录
附录一:
硬件实物图
附录二:
电源稳压模块原理图
附录三:
电桥电路原理图
附录四:
软件流程图
 升级会员
升级会员 