用Si8250设计数字电源.docx
《用Si8250设计数字电源.docx》由会员分享,可在线阅读,更多相关《用Si8250设计数字电源.docx(13页珍藏版)》请在冰豆网上搜索。
用Si8250设计数字电源
设计数字电源
1.数字电源技术发展很快,特别对供应数字系统的电源,发展更为迅速。
本文从模拟到数控给出一个转变的概念。
2.数控技术一览.
先与模拟技术做一个比较展示,在模拟型PWM控制器中有电压型和电流型。
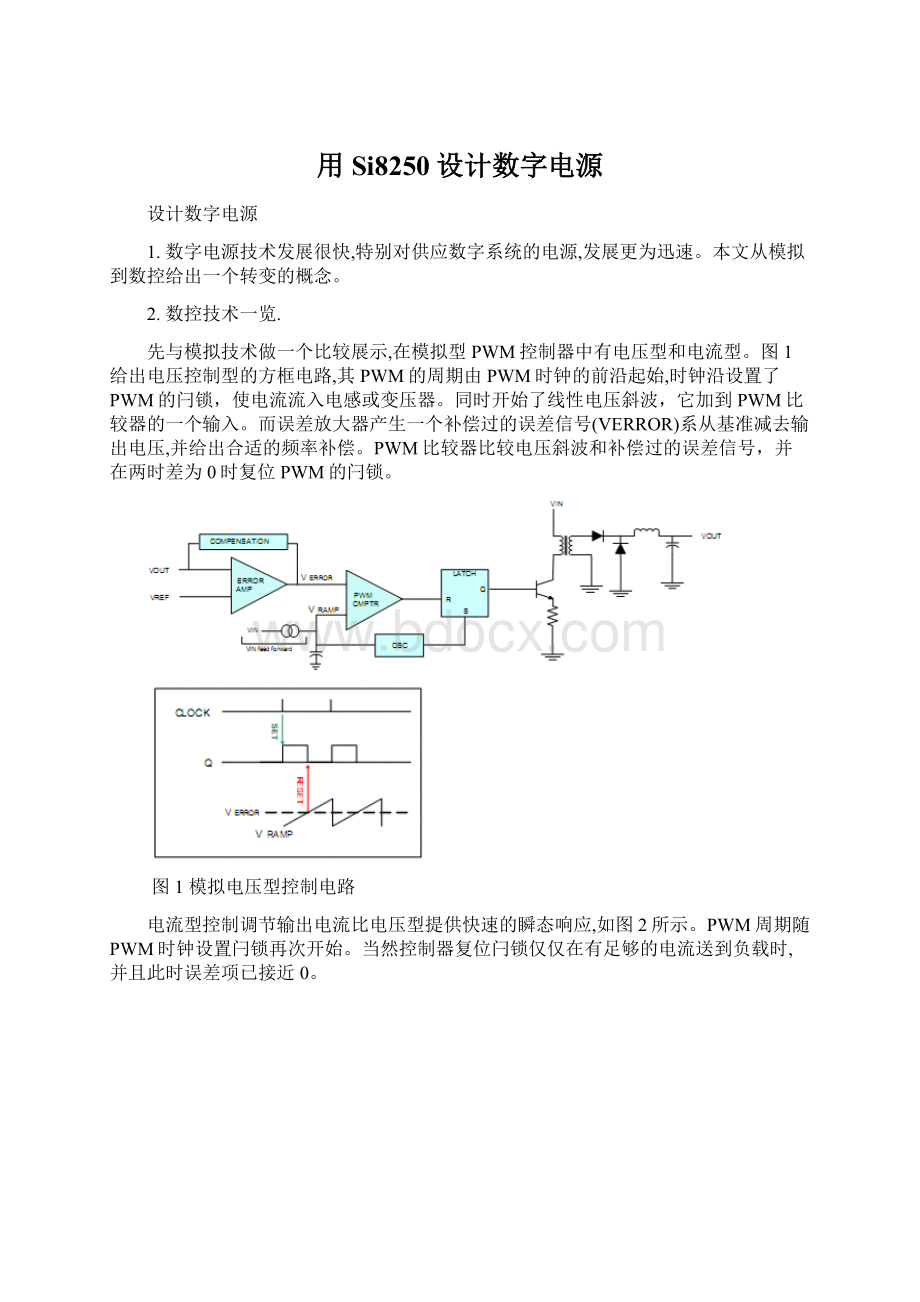
图1给出电压控制型的方框电路,其PWM的周期由PWM时钟的前沿起始,时钟沿设置了PWM的闩锁,使电流流入电感或变压器。
同时开始了线性电压斜波,它加到PWM比较器的一个输入。
而误差放大器产生一个补偿过的误差信号(VERROR)系从基准减去输出电压,并给出合适的频率补偿。
PWM比较器比较电压斜波和补偿过的误差信号,并在两时差为0时复位PWM的闩锁。
图1模拟电压型控制电路
电流型控制调节输出电流比电压型提供快速的瞬态响应,如图2所示。
PWM周期随PWM时钟设置闩锁再次开始。
当然控制器复位闩锁仅仅在有足够的电流送到负载时,并且此时误差项已接近0。
图2模拟电流型控制电路
以上无论哪种方法都有其自身的应用范围。
而用数控的PWM-IC,可以建立起更进一步改善的控制方案,能给出比电压型和电流型两种都更好的结果。
它减小了两者的差异,数字电压型控制更有效地将一个主电压控制环并入更优性能的增强的环路系统中。
3.新型数字控制器芯片Si8250系列展示概述.
Si8250是一款新问世的数控IC,图3给出Si8250控制的方框电路。
它很象模拟电压型控制。
控制过程的实现由Si8250直接模拟电压型控制,很象模拟电路的相似物。
输出电压系从基准减去后用数字误差放大器放大,该放大器由一个差分输入的模数转换器(ADC)和数字滤波器组成。
数字误差放大器U(n)仿照模拟误差放大器的VERROR(图1),数字PWM(DPWM)仿照模拟的PWM功能输出。
占空比是补偿误差变量U(n)的函数。
象许多模拟控制器一样致力于逐个脉冲式电流限制,以便在电流达到最大设定值时决定PWM波形中ON的部分。
图3数字电压型控制的PWM的方框电路
在控制处理器提供系统闭环控制时,系统处理器提供可编程的智能的特性增益。
系统处理器包含一个12位ADC(这是系统关键参数,诸如输入电压,输入电流)和一个高速的CPU。
CPU用来控制多个低带宽环路以使其控制过程最佳化。
于是,CPU可以熟练地控制掌握诸如开关控制时间,电压基准设置,保护阈值,环路带宽等。
在线路输入及输出负载的每一处都改善系统性能。
有了上述概念,再参看表1。
电流型比电压型的优点在于:
●更快速的瞬态响应。
●补偿回路比较简单。
●固有的对均流的支持。
●固有的变压器磁密平衡。
●固有的逐个脉冲电流限制。
●没有随输入电压变化的增益变化。
Si8250数字电压控制器针对上述每一点处理如下:
●快速的瞬态响应,非线性控制可以迅速解决瞬态响应。
此处CPU增加补偿带宽在瞬态的一个设置连续地调节环路带宽,直到瞬态问题解决。
●补偿的复杂性减少,数字控制环路补偿由软件来执行。
如此,则补偿的复杂性已不重要。
它既不在于补偿元件的数量也不在于板上位置或成本。
●电流均流。
管理处理器可以执行一个均流反馈算法。
用输出电流做为控制变量,补偿占空比的变化量U(n),以此控制变化。
●变压器磁密平衡。
管理程序可以执行反馈算法去驱动有效的直流电压跨过变压器到0。
采用调节时间及相位的综合体解决。
●逐个脉冲式限流。
致力于板上电路提供逐个周期式限流及过流保护。
●环路增益随着输入电压改变,管理处理器可以执行一个前馈算法,于是环路增益即作为VIN的函数。
上述支撑电压型控制方法给出了算法的轮廓,然后再加入电流控制型的优点,或许更重要的是离开了电流控制型的缺点,特别是对噪声敏感的问题,在占空比超过50%时,需要斜率补偿的问题以及在多输出中需要耦合电感的问题,其它软件控制环可以加入超出上面表格的一些项目。
例如:
CPU可以调节死区时间以减小输入电流从而提高效率,这些概念将在随后的文件中进一步讨论。
图4Si8250的内部等效方框电路
图4给出Si8250内部的系统框图,其基于功率传送系统,正如先前讨论的输出电压经过电阻分压器接到的输入,基于ADC的取样数据系统,必须限制ADC的输入带宽,ADC取样频率除以2(fs/2),通知到取样规范,这意味着一个RC网络放在ADC1输入处,其必须设计成有5MHz角频。
ADC0数字化有相对低的带宽系统参数信号。
如同输入电压和电流,用于给CPU提供一个低带宽的最佳环路,象ADC1和ADC1的输入带宽变化必须限制在fs/2(例如对200KHz采样限制在100KHz带宽),检测功率级电感电流波形连接到Si8250的输入,以提供逐个脉冲式电流限制和带宽,过流保护故障检测及关断DPWM输出驱动不再给外部的MOSFET栅驱动器电路,CPU有剩余带宽去管理外部器件,执行诸如风速调节的功能等。
4.设计实例
这里我们用一个400KHz350W半桥DC-DC变换器的设计做例子来学习如何用Si8250设计DC-DC隔离式功率变换器。
(详见Si8250DK)
半桥电路是一个通用电路拓朴,典型用于100W~500W输出功率,48V~400V输入电压的通讯或UPS系统中,其电气规格见表2。
4.1.1功率级元件设计。
在选择功率元件时有几个因素必须考虑,实际使用的开关频率决定了体积大小。
磁元件的损耗,MOSFET的开关损耗,所要的效率,瞬态响应,最大占空比,在此例子中,选择400KHz。
4.1.2变压器设计,匝比。
变压器的匝比按照下式选择:
4.1.3输出滤波设计,采用倍流整流。
4.1.4选择初级MOSFET。
4.1.5选择同步整流MOSFET。
4.1.6选择栅驱动。
选择HIP2100驱动IC。
4.2控制环路设计
首先为数字式反馈控制环最佳带宽及保持输出电压稳定。
其次要参考的数字电压型控制如何执行,多通道半直接数字隔离通道PWM波形,如何用Si8250控制器作半桥驱动,检测的初级侧数据(输入电压初级电流中点平衡电压)如何送入位于二次侧的Si8250的内部。
图5为数字半桥的系统方框电路。
图5数字式半桥的方框电路
4.2.1ADC1
ADC1的解析决定输出电压检测值(ΔVo/Vo)为了稳定输出电压调整率,使之达标(1.5%),变换器必须检测输出电压的误差小于允许的输出电压变化率ΔVo,由(6)式给出ΔVo。
NA/D是基于相应的A/D输出的位数。
H是输出电压检测器的增益,为VREF/Vo。
VMAX-A/D为A/D变换器的全电压范围,假设为单极变换器范围从0~Vmax。
由Vo分为两半,我们可以表示上式的左边为变化的百分比,它等于:
(7)式可用于计算最小为获得好的调整率所需的变换器的位数。
ADC1(LSB)可以从4mV低值上调到20mV最大。
ADC1的增益为1/LSB。
ADC1的取样频率必须至少两倍于最高频率的元件,这样我们可以得到期待的输出电压。
为了防止混淆,正常的实际值有比最高频率5~6倍之多的取样频率。
ADC1的取样频率可以选择为5MHz或10MHz。
5MHz取样频率必须选作功率开关频率以上大约700KHz,而10MHz的选择应对更高频率。
4.2.2DPWM
DPWM方案取决于最小的可作出的输出时段的独立时段范围。
例如10ns可应对任何给出的最小10ns的移动输出时沿。
作为结果,DPWM解决方案还取决于最小输出电压校正它在占空比上的变化。
如果DPWM的方案少于ADC1的方案,则零误差输出电压值将不会适应零位ADC值。
反馈控制器将周期性地按照两个或两个更独立的占空比值工作,这会导致电源输出中的调合,这种类型的振荡器参照作为限制周期,可确保输出电压的最小变化(mV),由LSB变化导致的占空比是最小的,比AD变换器的LSB还要小。
防止限制周期振荡的另一种方法是增加DPWM因抖动造成的有效的解决。
根据定义,抖动是附加在高频上的周期的或偶然的量化的信号。
它晚于滤过后产生的平均直流电平,以增加解决方案。
Si8250控制器有能力插入宽带的噪声到控制环,以执行数字式抖动。
占空比随机的由1LSB在多个周期中改变,平均占空比有一个有效值其在两个邻近的量化水平之间。
抖动噪声被输出LC滤波器平均功能给移去,抖动器控制的位数在PIDCN寄存器中可以实现。
抖动的幅度可以低到LSB/16,或者如LSB/8,LSB/4,LSB/2,LSB或2*LSB。
它只取决于抖动位数的结构,此处LSB是ADC1的LSB。
开关周期由SW_CYC〔8:
0〕位控制,此时开关频率等于时钟进入DPWM由SW_CYC〔8:
0〕分压加上1,如下式:
由内部振荡器做为典型的时钟源,DPWM模块可以由PLL选择出的三个时钟之一来计时,于是最小开关频率略少于50KHz,用DPWMSP〔1:
0〕设置到10b,如此最小开关频率比用DPWMSP〔1:
0〕设置到00b略少于400KHz。
4.2.3PID+滤波器(比例,积分,微分)
S-领域环路补偿设计技术可以加到此处,如果ADC取样频率在数字控制环中略高于控制环的带宽的话,其接近已知的数字重新设计加到所控制的Si8250的设计中来,由于取样频率为10MHz,时钟的等效的模型图在图6中给出。
图6数字控制DC-DC的环路方框图
连续时间开环增益,为上述所有方框之乘积可以表示为:
ADC1的和DPWM的传输函数可以表示如下:
此处,TA/D为ADC1的转换时间。
NDPWM为用于表示DPWM输出的位数。
TDPWM为时钟的延迟时间。
控制到输出的小信号传输函数Gvd可以近似表示为:
Rc为输出滤波电容的ESR。
RL为输出滤波电感的ESR。
从上面的传输函数可以推断功率级有一个零点,它是一个输出滤波电容与其寄生电阻合在一起的函数。
还有两个极点,它是两个输出滤波电容和输出滤波电感的函数。
上面传输函数的图形示于图7。
在正常的48V输入电压时,从传输函数Bode图(图7)可以看出LC谐振频率大约在10KHz。
在增益降到-40db/10倍频之外时,两个极点位于谐振频率贡献的相移区域,它接近于180°相移处。
控制器的目的是减小稳定状态下的输出误差,输出阻抗和线路噪声,并要确保宽带范围内的稳定,它必须提供闭环增益GM为6~12db相移区间的45°~60°。
这样PID加上第二级滤波器可以执行Ⅲ型补偿,其示于图8。
用来获得宽带和大的直流环增益给零稳态误差。
在低频处,集成的极点fpo引导大的低频环增益和精确的直流调整率,零点频率fz1和fz2加上相移改善了相位区间,高频极点fp1和fp2防止开关纹波干扰PWM的调制。
当ESR的频率零点(=1/(2*Pi*RESR*CF)降到感兴趣的范围内,高频极点之一必须位于此频率处,以抵消增加的增益和ESR提升的相移区的影响。
4.2.4前馈补偿
在电压型工作时,环路增益随输入电压VIN变化,多数模拟系统采用电压前馈技术动态地改变环路增益以补偿由于VIN变化导致的增益变化。
这在PWM中典型由改变锯齿斜波信号的幅度来执行,以使之正比于输入电压。
PWM的简化调制产生好的宽范围开环线路调整率,并简化输出电压反馈环的设计。
为了实现前馈补偿,变换器输入电压VIN和脉宽Ton将与输入电压独立。
采用Si8250时,前馈补偿用测量输入电压变化和调制环路增益数字补偿的系数A3来完成。
5,Si8250的工具设备
Si8250应用建起的工具简化了控制环的设计,应用设计师包括BUCK补偿工具设计,如图9。
它计算滤波器效果,并显示系统的响应,其基于用户的功率级设计和零点﹑极点的放置。
它还可以用于与BUCK相关的拓朴,如正激﹑半桥﹑全桥等电路拓朴。
频响图(图10)显示控制器的响应,支持用户的滤波器效果。
这两个工具有一个接口功能,它允许图的数据送出到外面去仿真,对其它基本拓朴的设计也有帮助。
图9补偿网络编辑实例视屏。
图10控制环补偿的实际的Bode图
下面的例子用图说明设计控制环参数给BUCK拓朴的应用步骤:
1,开始补偿编辑
2,改进参数﹑设计(输入电压﹑相数﹑滤波电容值估计﹑电感值估计﹑频率的极点和零点等)。
3,敲击“上部效果”看图形底部,滤波效果自动产生控制器的频率响应图。
进入系统如图所示。
频响图开环传输函数刚好补偿的或设备传输函数从下拉的手册中选择出来。
4,敲击“控制器补偿效果”看图形等效的数字效果状态作为六个值,实例图形示于图11(略)。
此屏允许效果可用手编辑,使控制器响应图由上面65536个点展示出其外部。
5,用户可以节省这些设置,在项目文件或建起一个新的IDE文件。
这个文件可以从IDE中打开,具有所有的先前各步骤含自动地进入核心图。
6,核心图展示
Si8250DK开发关键来自预先写入的程序,定义的波形及应用路线。
它包括全部算法支撑隔离和非隔离的模拟数据收集,如起动,调整,故障检测,恢复,PM-Bus通讯以及关断。
用户仅需要放置这些核心点的软件到它的终端应用接口。
通常包括定义参数用应用构建工具,加入这些算法及所需支撑的合适的功能。
一个典型功率变换系统的状态图标于图12,它的工作状态概括总结于表3,图12给出系统状态。
图12顶级水平的系统状态图
表3核心状态总结概览
初
始
状
态
初始状态,所有Si8250的硬件登记﹑VDD监视器﹑MCU看门狗和定时器﹑板上振荡器﹑处理器I/O接口的类型及功能﹑12位ADC核心图表(定时器2)﹑UART(隔离DC-DC用)﹑ENABLE﹑REFDAC通信看门狗和定时器﹑DPWM时间设置﹑DSP滤波器发动机生效﹑CPU中断﹑峰值电流检测﹑OCP硬件﹑全部软件参数进入初始状态﹑清除内部状态及控制标识﹑负载系统参数包括保护数据﹑系统设置点
软
起
动
批准起动允许﹑测试VIN阈值是否高于UVLO水平﹑检查内外使能状态﹑故障测试﹑初始软起动﹑调节预偏置﹑开始软件过滤﹑斜波REFDAC在死循环模式有保护使能定义的轨道,使之适合内部状态和控制标识﹑管理PMBus通讯
过
渡
管理过渡状态,从软起动到稳定状态的调整率,防止过冲,使之适合内部状态和控制标识.
稳
定
状
态
执行保护故障的任务,管理PMBus通讯,执行低带宽的环路最佳化,死区时间控制(改善效率),非线性控制(快速瞬态响应)DC平衡,(半桥结点平衡在VIN/2),VIN前馈,轻载时跨越周期模式,适合内部状态和控制标识.
故
障
复
原
检测出故障后的响应功能.该选择包括,不管故障﹑校正故障﹑记录故障﹑或进行关断功能
系
统
关
断
关断系统.软关断或硬关断,异步或开关在边界,所有DPWM或一些输出处于停止状态,在规定的数个时段后并试图重新起动或者闩锁关断
7,时间顺序发生器和DPWM时序的编辑
合理的时间顺序设计才能确保DPWM输出的(PH1~PH6)时序正确,才能准确地驱动功率开关,保持正确工作,更好的效率和变换器的保护。
在半桥电路中,时序设计要确保两个开关之间开启﹑关断的时间间隔而不令其共同导通。
在低压及大电流应用时二次侧开关携带大电流,所以必须减小死区时间以确保最短的体二极管导通时间,以减少损耗,并确保正常工作。
DPWM时序图的编辑,允许设计师建立DPWM的起始编码,用简化图的初始编码供给末端系统,它适应六个输出相位可用于建立正或负的死区时间,相对沿和无条件沿及其它时序的需要供给系统。
无条件沿是DPWM的输出波形的上升沿和下降沿(PH1~PH6),它同时出现在每个开关周期的瞬间。
相对沿总与其它沿有些漂移.
U(no),U(n1),U(n2)和U(n3)是相对沿,但其间的偏移可由U(n)决定,并典型由反馈环控制。
7-1,时序图实例,死区时间
下面是一个简单的同步BUCK变换器工作在连续导通模式的实际设置。
它用一个附加相提供脉冲去同步其它电路,这个实例示出如何插入死区时间在两相之间,见图13。
图13DPWM的时间顺序和死区图
7-2,系统参数调节
系统的设置程序允许设计师去输入所有系统的设置,如UVLO,OVP,OCP等,然后改变的参数到HEX。
大体结果初始编码到核心,打开系统设置窗口,打开应用建立和选择系统结构﹑系统设置。
8,编辑和下载程序准备调试.
*一旦所有源文件加到建起的目标上,敲击Build/Make键在工具框中选择Build/Make项。
*在接到目标器件以前,几个连接点的选择必须先设置,打开连接器选择窗口,选择连接口,在IDE操作中,首先选择适配器,它包括串接适应部分的关键。
下一步,校正“调试接口”,Si8250/1/2系列器件采用两线调试接口,一旦全部选择完毕,敲击键,关闭窗口。
*敲击“下载码”键,进入工具框。
*当完成调试部分以后,节省科目,保存电流目标,建起的结构编辑设置,并位于打开的调试窗口,为节省科目,选择“节省科目”操作,建立新的名称给此科目,并敲击节省键。
9,Si8250的调试模式
IDE含在Si8250开发关键中,为在线调试特点。
它选择使能用户在Si8250工作时检查或使适合专门功能的寄存器。
例如:
滤波器结构可以用简单新型有效值使之最佳化。
当电源接到网络上分析和运行时,IDE还可以工作在标准模式,此处SFR检查并使之适合,这项工作仅在Si8250没有运行时操作,如图18所示。
IDE可以设置成在线调试模式或者标准调试模式。
10,系统的最佳化
当为了保持高带宽,在必要时可以小心地去选择PID和滤波器。
以下是要注意的几点。
*增大Kp(比例增益)。
增大比例增益,可以增加中频区域和低频区域,此处集成因子停止影响,并升高频率于不同的因子处。
*增大Ki(积分因子)。
增大积分因子会影响增加低频增益,并减少稳态的误差。
但是它还改变比例因子的频率,使之更有效,它将使最希望上升的Ki尽可能地高。
但是更高的Ki会有更负的相位移插入到比例的范围,这将减少系统的相位区间,导致过冲和振铃。
*增加Kd(微分增益)。
增加微分增益较低的频率处,它比比例因子有更多的碰撞。
这等于插入了一个正的相移到比例范围,帮助从积分因子Ki产生负向的相移,从而改善相位区域,减小振铃。
当然它有不希望产生的影响,会增加高频增益使系统更敏感。
*调节系数A1,A2,A3。
系数A1和A2决定高频极点,用于滤出高频噪声,并补偿滤波电容的ESR的影响。
系数A3是一个简单的增益项,它可以用于改变整个开环增益,A3的大变化能增加系统的不稳定性,必须予以防止。
例如,当A3从0*01变到0*02时,变化的百分比是100%,它会产生大信号的不稳定性。
不管如何,A3从0*15到0*16变化时,才不至于改变百分比,相反会影响整个环路带宽。
因此,从系统的视点,适当合理的做法是有较高的A3,然后调节其它系数(Kp,Kd,Ki,A1和A2)去获得所需要的带宽。
 升级会员
升级会员 