第十一章均衡.docx
《第十一章均衡.docx》由会员分享,可在线阅读,更多相关《第十一章均衡.docx(6页珍藏版)》请在冰豆网上搜索。
第十一章均衡
第十一章均衡
11.1均衡器中的噪声增强
11.2均衡器的类型
11.3折叠谱和无ISI传输
11.4线性均衡
11.5最大似然序列估计
11.6判决反馈均衡
11.7其他均衡方法
11.8自适应均衡:
训练和跟踪
时延扩展会引起码间干扰(ISI),均衡就是指在接收端所采取的抗ISI技
术。
当码元周期与信道的均方根时延扩展可比时,就需要考虑ISI问题。
11.1均衡中的噪声增强
均衡器的目的是消除ISI的影响。
但在消除ISI的同时,必须要顾及到噪声功率的增强问题。
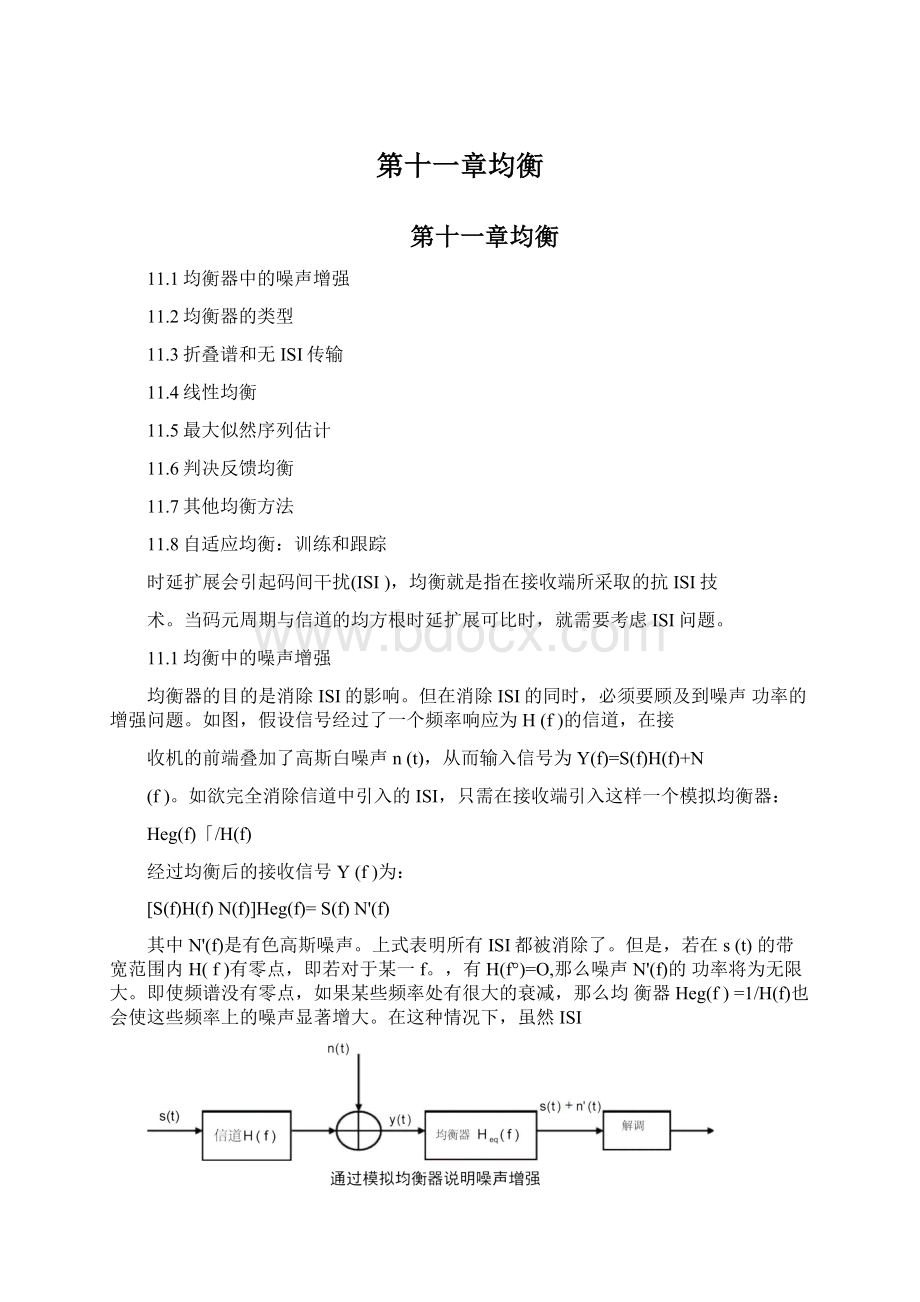
如图,假设信号经过了一个频率响应为H(f)的信道,在接
收机的前端叠加了高斯白噪声n(t),从而输入信号为Y(f)=S(f)H(f)+N
(f)。
如欲完全消除信道中引入的ISI,只需在接收端引入这样一个模拟均衡器:
Heg(f)「/H(f)
经过均衡后的接收信号Y(f)为:
[S(f)H(f)N(f)]Heg(f)=S(f)N'(f)
其中N'(f)是有色高斯噪声。
上式表明所有ISI都被消除了。
但是,若在s(t)的带宽范围内H(f)有零点,即若对于某一f。
,有H(f°)=O,那么噪声N'(f)的功率将为无限大。
即使频谱没有零点,如果某些频率处有很大的衰减,那么均衡器Heg(f)=1/H(f)也会使这些频率上的噪声显著增大。
在这种情况下,虽然ISI
被消除了,但因为信噪比大大降低,所以性能也会很差。
因此,均衡设计应当在减小ISI的同时最大化均衡器输出的信噪比。
11.2均衡器的类型
均衡技术主要分为线性和非线性两种类型。
线性均衡实现简单,易于理解,但多数无线通信系统并没有采用线性均衡,因为他的噪声增强要比非线性均衡大。
最常用的非线性均衡是实现简单、性能也不错的判决反馈均衡。
但在低信噪比时,DFE存在误码传播的问题,进而会导致性能恶化。
最优的均衡技术是最大似然序列估计,但其复杂度随时延扩展成指数增长,这对多数信道来说是难
以实用的。
均衡器的类型、结构和算法
11.3折叠谱和无ISI传输
端到端的等效基带系统
令f(t)表示发送端脉冲成形、信道和匹配滤波器冲激响应合成的等效低
通冲激响应:
心*
f(t)=g(t)*c(t)*gm(-t)
那么匹配滤波器输出为:
y(t)=d(t)*f(t)•ng(t)八dkf(t-kTs),ng(t)
其中ng⑴二n(t)*g;(-t)是均衡器输入端得等效低通噪声,Ts是码元周期。
令
f[n]=f(nTs)表示f(t)的抽样y[n]=y(nTs)表示y(t)的抽样,贝S
y[nrdnf[O「dkf[n-k]v[n]
k#n
其中第一项为期望的数据比特,第二项为ISI,第三项为噪声的抽样。
满足无ISI传输的充分必要条件是:
△1乂n
F、(f)=匚'F(f-)=f[0]
Tsn二^1Ts
这里的(f)是周期为丄的周期函数,常称为折叠谱。
-Ts
11.4线性均衡
讨论两种线性均衡器:
迫零均衡器和最小均方误差均衡器。
前者可以完全消除ISI,但是噪声增强比较显著。
后者兼顾了降低ISI和避免噪声增强的问题,它能最小化发送符号和均衡器输出符号之间的均方误差。
因此MMS均衡的错误
率性能要好于ZF均衡。
11.4.1迫零均衡
均衡器的输入{%}可以用组合信道的等效低通冲激响应的抽样来表示,即
丫⑵二D(z)F(z)Ng(z)
迫零均衡器将消除由f(t)引入的所有ISI。
能实现这一目的的均衡器为:
Hzf(z)=1/H(z)
它是前述的模拟均衡器在时间上离散化后的等效基带均衡器,同样也有噪声增强的问题。
具体而言,均衡器输出的噪声样值的功率谱密度为
可见,如果信道H(z)在信号带宽范围内的任一频率处受到严重衰减,噪声功率就会显著增加。
正是这一点使人们认识到,均衡器的设计必须要在消除ISI和噪声增强之间寻求一种最佳平衡。
11.4.2最小均方误差均衡
MMS均衡的目标是最小化发送符号dk和均衡器输出dk之间的均方误差,也就是要选择{Wi}使E[dk-(?
k]2最小。
MMS均衡时线性均衡器,其输出?
时输入y[k]
L
的线性组合:
dk八.Wi^k-i]
这样,求最优系数的问题是一个标准的线性估计问题。
为了利用已有技术,
我们将滤波器也⑵分为两部分:
噪声白化部分12;(1//)和消除ISI部分H\q(Z)
如图所示:
带有噪声白化滤波的MMS均衡
滤波长度无限时的完整MMS均衡器可以表示为
MMSE匀衡器
这个结果有三个值得注意的地方。
首先,这个理想的无限长
抵消了噪声白化滤波器。
其次除了噪声项No外,此滤波器与迫零滤波器一致,
因此无噪声时二者是等价的。
最后,这个理想的均衡器设计显然达到了信道反
转和噪声增强之间的平衡:
如果F(z)在某频率严重衰减,分母中的噪声项N0
的存在防止了输出噪声的显著提高。
而在噪声功率密度No相对于F(z)较小的
频率处,均衡器实际上是反转了F(z)。
11.5最大似然序列估计
最大似然序列估计对发送的符号序列进行估计,由于它不使用滤波器,因此没有噪声增强的问题。
MLSE勺结构图同11.3图,只是将均衡器和判决器换成了MLSE算法。
当脉冲成形和信道响应组合的h(t)给定时,MLSE算法根据接收
信号w(t),选择出具有最大似然值的输入序列{dk}。
得到d?
■二argmax[2Re{'dky[k]}二二:
dkdmu[k-m]]
kkm
由此可见,MLSE的输出只与抽样值{y[k]}和信道参数有关。
由于MLSE是从匹配滤波器之前的信道输出w(t)为基础到出的,说明对MLSE佥测来说,上图中滤波器对gm(t)=h(t)时是最佳的。
11.6判决反馈均衡
判决反馈均衡包括一个类似于线性均衡的前馈滤波器W(z)和一个反馈滤
波器V(z),如图所示。
前馈滤波器的输入是接收序列,反馈滤波器的输入是已判决的序列。
判决反馈均衡器将已检测的符号{(?
}通过反馈滤波器,来近似前馈滤波器W(z)和组合信道F(z)卷积后的ISI,从而能在接收符号中减掉ISI。
由于V(z)处于反馈环中,因此它必须是严格因果的,否则系统将变得不稳定。
反馈滤波器的作用是近似信道的频率响应,而不是对其进行反转,所以不存在噪声增强的问题。
当信道的频谱有很多深衰落零点时,判决反馈均衡的性能一般比线性均衡好很多。
反馈滤波器
V⑵
判决反馈均衡器的结构
假设W(z)有N+1个抽头,V(z)有N2个抽头,那么判决反馈均衡的输
0N2Q
出可表示为也二'Wj^k-i]八vfk」
i=_Nii丄
11.7其他均衡方法
虽然MLSE是最佳均衡,但其复杂度使它未能广泛应用。
人们在降低MLSE
的复杂度方面已经作了许多工作。
与逐符号的均衡相比,一些低复杂度的MLSE
在性能和复杂度之间取得了较好的平衡,其性能可以接近最优的MLSE而复杂
度要低得多。
其他均衡:
Turbo均衡、MAP均衡。
如果发送端已知信道信息,则可进行预均衡,即让发送符号先通过一个反转信道频率响应的滤波器。
11.8自适应均衡:
训练和跟踪
前述的所有均衡器设计都假设已知组合信道中的冲激响应h(t)=g(t)
*c(t)。
在设计接收机的时候,通常我们并不知道c(t),因此所设计的均衡器必
须能根据具体的c(t)值进行调整。
无线信道的响应c(t)=c(.,t)时随时间变化的,因此系统必须要定期估计信道c(t)并更新相应的均衡器系数,这一过程称为均衡器训练或自适应均衡。
均衡器也可以用来检测数据来调整均衡器系数,这个过程称为均衡器跟踪。
跟踪的基本思想是:
(i)如果判决误差不是零,则训练
一定是不理想的;(ii)可以用判决误差来调整均衡器中的信道估计。
均衡器的训练和跟踪特性
算法码元周期的乘法运算数
复杂度
训练收敛时间
跟踪
LMS2N+1
低
慢(>10NTS
差
MMSEN倒N3
非常高
快(:
NTs)
好
RLS2.5N24.5N
高
快(:
NTs)
好
快速卡尔曼DFE20N+5
相对低
快(:
NTS
好
平方根LSDFE1.5N26.5N
高
快(:
NTS
好
 升级会员
升级会员 