数字摄影测量复习题.docx
《数字摄影测量复习题.docx》由会员分享,可在线阅读,更多相关《数字摄影测量复习题.docx(8页珍藏版)》请在冰豆网上搜索。
数字摄影测量复习题
1、数字摄影测量:
数字摄影测量是基于数字影像与摄影测量的基本原理,应用计算机技术、数字影像处理、影像匹配、模式识别等多学科的理论与方法,提取所摄对象用数字方式表达的几何与物理信息的摄影测量学的分支学科。
2、数字摄影测量与模拟、解析摄影测量的最大区别在于:
(1)它处理的原始信息不仅可以是像片,更主要的是数字影像(如SPOT影像)或数字化影像;
(2)它最终是以计算机视觉代替人眼的立体观测,因而它所使用的仪器最终将只是通过计算机及其相应外部设备,特别是当代,工作站的发展为数字摄影测量的发展提供了广阔的前景;
(3)其产品是数字形式的,传统的产品只是该数字产品的模拟输出。
(4)十分强调自动化或半自动化,即应用计算机视觉(包括:
计算机技术、数字影像处理、影像匹配、模式识别等)的理论与方法,自动或半自动地提取所摄对象的信息。
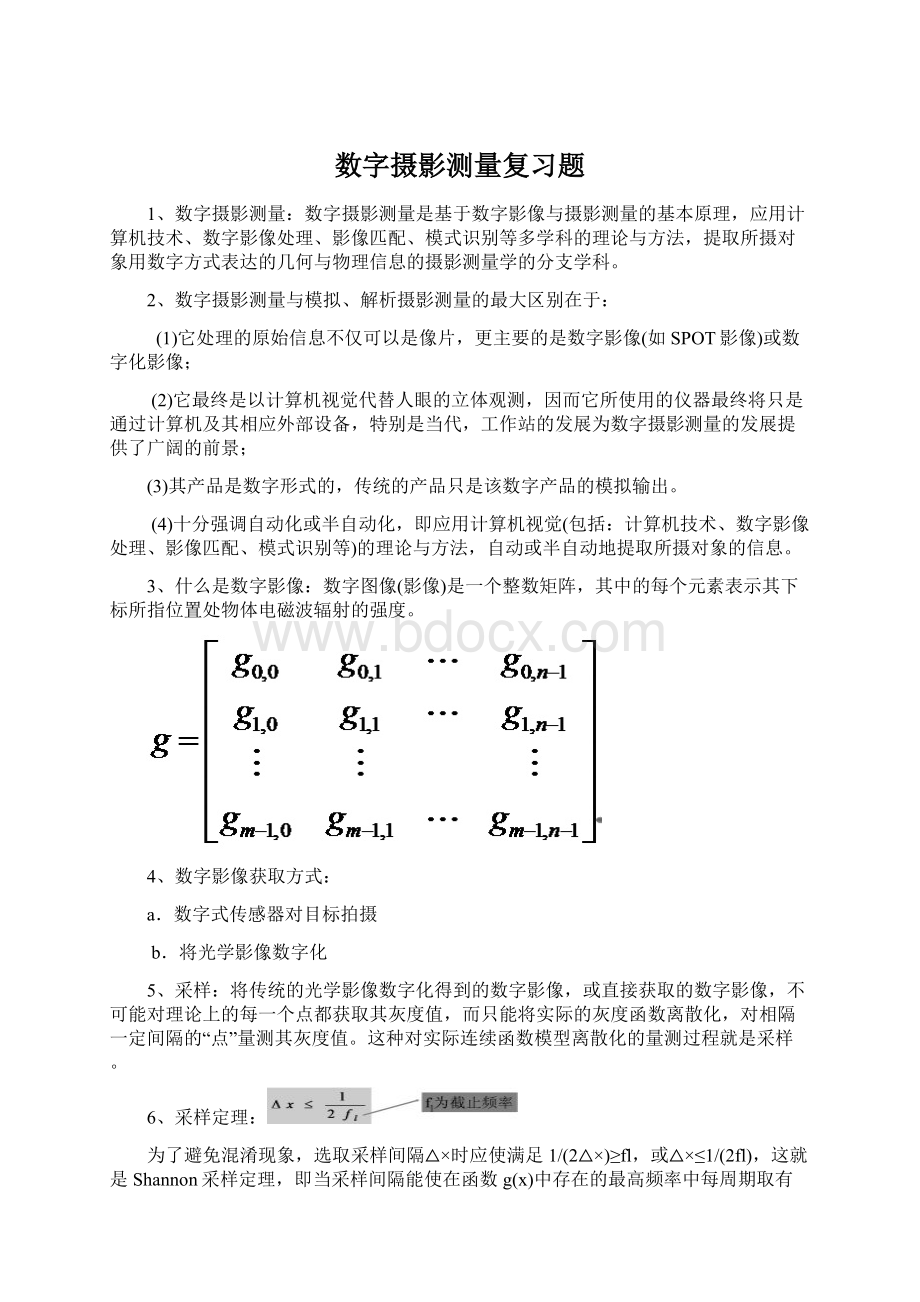
3、什么是数字影像:
数字图像(影像)是一个整数矩阵,其中的每个元素表示其下标所指位置处物体电磁波辐射的强度。
4、数字影像获取方式:
a.数字式传感器对目标拍摄
b.将光学影像数字化
5、采样:
将传统的光学影像数字化得到的数字影像,或直接获取的数字影像,不可能对理论上的每一个点都获取其灰度值,而只能将实际的灰度函数离散化,对相隔一定间隔的“点”量测其灰度值。
这种对实际连续函数模型离散化的量测过程就是采样。
6、采样定理:
为了避免混淆现象,选取采样间隔△×时应使满足1/(2△×)≥fl,或△×≤1/(2fl),这就是Shannon采样定理,即当采样间隔能使在函数g(x)中存在的最高频率中每周期取有两个样本时,则根据采样数据可以完全恢复原函数g(x)。
此时称fl为截止频率或奈奎斯特(Nyquist)频率。
7、采样间隔如何确定:
8、信噪比与采样孔径的关系(填空):
采样孔径越大,信噪比越高,但采样孔径太大,则降低影像分辨率及精度。
9、影像灰度的量化:
影像灰度的量化是把采样点上的灰度数值转换成为某一种等距的灰度级。
灰度级的级数一般选用2的指数M,当M=1时灰度只有黑白两级。
当M=8时,则得256个灰度级,其级数是介于0与255之间的一个整数,0为黑,255为白。
10、采样间隔与数据量关系:
一般来说,采样间隔越大,所得图像像素数越少,空间分辨率低,质量差,严重时出现像素呈块状的国际棋盘效应;采样间隔越小,所得图像像素数越多,空间分辨率高,图像质量好,但数据量大。
11、什么是影像重采样:
当欲知不位于矩阵(采样)点上的原始函数g(x,y)的数值时就需进行内插,称为重采样,意即在原采样的基础上再一次采样。
有哪几种方法:
双线性插值法、双三次卷积法、最邻近像元法。
优缺点比较:
最邻近像元法最简单,计算速度快且能不破坏原始影像的灰度信息。
但其几何精度较差。
前两种方法几何精度较好,但计算时间较长,特别是双三次卷积法较费时,在一般值况下用双线性插值法较宜。
12、双线性内插法原理(推导)
13、什么是数字影像内定向:
14、什么是核线影像:
沿核线方向,将航片的灰度重新排列,
所形成的影像称为核线影像。
15、核线基本性质:
(1)在倾斜影像上的所有核线相互不平行,但交于核置(极点)。
(2)在理想影像平面上,所有核线相互平行,不仅同一影像面上的核线平行,而且影像对上的相应的核线也平行,上下视差为零,这一特性对于立体观测是十分有用的。
16、确定同名核线的方法:
a.基于数字影像几何纠正b.基于共面条件
17、核线影像生成的过程:
(1)在内定向的基础上.按照单独像对相对定向的方法进行相对定向,求得五个相对定向元素。
(2)根据相对定向的结果,将原始影像的四个角点投影到核线影像平面上,以确定核线影像的范围。
18、获取核线影像有哪两种情况:
在“水平”影像上获取核线影像:
从水平核线影像上,根据公式获取倾斜影像上对应核线上的点的坐标,由于所求得的像点不一定恰好位于原始采样像元中心,如图,这时可通过重采样来获取灰度值,再把像元的灰度值填回“水平”影像。
直接在倾斜影像上获取核线影像:
在求出了核线后,就可得到核线的倾斜率K,在核线上根据一个起点即K,就能确定核线在倾斜影像上的位置,这样就能获得沿核线方向排列的影像。
19、什么是特征:
特征是区分不同目标图像的根据,是不同目标图像固有性质的某种表现形式。
理论上,特征是影像灰度曲面的不连续点。
在实际影像中,特征表现为在一个微小邻域中灰度的急剧变化,或灰度分布的均匀性,也就是在局部区域中具有较大的信息量。
20、特征的分类:
点状特征,线状特征,面状特征。
21、什么是特征提取:
是从图像中提取图像特征的技术过程。
或是从原始图像中提取区分某类目标图像依据的技术过程。
22、为什么要进行特征提取:
对一幅数字影像,我们最感兴趣的是那些非常明显的目标,而要识别这些目标,就要进行特征提取。
特征提取是影像分析和影像匹配的基础,也是单张影像处理的最重要的任务。
23、特征提取的方法:
(1)兴趣值的选定:
兴趣值是判定所检测像无是否为感兴趣的特征的基本依据。
(2)阈值的选定:
阈值是判定所检测像无是否为感兴趣的特征的标准。
(3)特征提取策略(4)特征提取的基本过程
24、点特征提取算子,基本思想,原理,推算过程:
点特征提取算子的定义:
点特征提取算子是指运用某种算法使图像中独立像点更为突出的算子,它又被称为兴趣算子或有利算子,主要用于提取我们感兴趣的点(如角点、圆点等)。
1.Moravec算子2.Forstner算子
25、线特征:
线特征是指影像的“边缘”与“线”,“边缘”可定义为影像局部区域特征不相同的那些区域间的分界线,而“线”则可以认为是具有很小宽度的、其中间区域具有相同的影像特征的边缘对,也就是距离很小的一对边缘构成一条线。
26、线特征提取算子表达式:
27,Hough变换的基本原理:
是将影像空间中的曲线变换到参数空间中,通过检测参数空间中的极值点,确定出该曲线的描述参数,从而提取影像中的规则曲线。
用于检测图像中直线、圆、抛物线、椭圆等
28、直线Hough变换基本步骤
·对影像进行预处理提取特征并计算其梯度方向,
·将(
,p)参数平面量化,设置二维累计矩阵H(
i,pj).
·边缘细化,即在边缘点的梯度方向上保留极值点而剔除那些非极值点,
·对每一边缘点,以其梯度方向
彤番中心,设置一小区间[
-
,
+
]
29、匹配的定义:
在摄影测量与遥感中,匹配可以定义为在不同的数据集合之间建立一种对应关系。
这些不同的数据集合可以是影像,也可以是地图,或者目标模型和GIS数据。
如果这些数据集合是影像,就称为影像匹配。
30、影像相关分为电子相关、光学相关或数字相关三类。
31、数字相关:
利用计算机对数字影像进行数值计算完成影像的相关。
32、相关函数谱分析:
当a较小时,S(f)比较平缓,高频信息丰富。
当a较大时,S(f)比较陡峭,低频信息占优势。
当a较小时,R(τ)比较陡峭,相关精度高,但拉入范围较小。
当a较大时,R(τ)比较平缓,相关精度较差,但拉入范围较大。
分析的结果:
S(f)较平缓,高频信息较丰富-->相关函数R(τ)较陡峭,相关精度高-->拉入范围较小-->出错率高
功率谱S(f)较陡峭,低频信息占优势-->相关函数R(τ)较平缓,相关精度较差-->拉入范围较大-->出错率低
33、什么是金字塔影像:
对于二维影像逐次进行低通滤波,并增大采样间隔,得到一个像元素总数逐渐变小的影像序列,将这些影像叠置起来颇像一座金字塔,因而称之为金字塔影像结构。
34、分频道相关(多级相关):
分频道可采用两像元平均、三像元平均、四像元平均等等分若干频道的方法。
35、几种基于灰度的影像匹配的测度:
相关函数测度:
计算简单,没考虑几何变形的影响,没考虑灰度畸变的影响,在没有几何变形和灰度畸变的情况下,也可能产生假配准。
协方差函数测度:
计算比较简单,没考虑几何变形的影响,当两影像的灰度强度平均相差一个常量时,不受影响,但灰度反差拉伸对其有影响。
相关系数测度:
计算比较复杂,没考虑几何变形的影响,不受灰度线性畸变的影响。
差平方和测度:
计算简单,没考虑几何变形的影响,没考虑灰度畸变的影响。
差绝对值和测度:
计算简单,没考虑几何变形的影响,没考虑灰度畸变的影响。
36、基于灰度的影像匹配过程
在左影像上选一个要匹配的点,称为目标点
以目标点为中心,开取一定大小的窗口,称为目标窗口。
以影像的重叠范围以及其他的先验知识,确定右影像上同名点可能存在的范围,称为搜索区域
以搜索区域内的每一点为中心,开取同样大小的窗口,称为搜索窗口
对于每一个搜索窗口,计算目标窗口与搜索窗口之间的相似性侧度--相关系数。
以相关系数最大值所对应的匹配窗口作为目标窗口的配准窗口,即共轭窗口。
同时配准窗口的中心像素就作为目标点的配准点,或共轭点。
进行精度评定,如要求达到子像素精度,可采取内插措施
37、像素相关的精度
38、相关系数的抛物线拟合提高相关精度推导:
f(s)=A+B·S+C·S2
39、铅垂线轨迹法:
在物方有一条铅垂线轨迹,它在影像上的投影是一直线。
就是说VLL与地面交点A在影像上的构像必定位于相应的“投影差”上。
具体步骤:
给定地面点的平面坐标(X,Y)与近似最低高程Zmin。
Zi=Zmin+i·Z高程搜索步距Z可由所要求的高程精度确定。
计算左右像坐标(xi’,yi’)与(xi”,yi”)分别以(xi’,yi’)与(xi”,yi”)为中心在左右影像上取影像窗口,计算其匹配测度还可以利用k及其相邻的几个相关系数拟合一抛物线,以其极值对应的高程作为A点的高程,以进一步提高精度,或以更小的高程步距在一小范围内重复以上过程。
40、最小二乘影像匹配精度:
影像匹配可达到1/10甚至1/100像素的高精度
优点:
1、非常灵活地引入各种已知参数和条件,从而可以进行整体平差,2、解决“单点”的影像匹配问题,求“视差”;直接解求其空间坐标,3、同时解决“多点”影像匹配或“多片”影像匹配,4、引入“粗差检测”,大大地提高影像匹配的可靠性。
41、影像灰度的系统变形有两大类:
辐射畸变;几何畸变。
具体求解?
42、最小二乘影像匹配的基本思想:
在影像匹配中引入这些变形参数,同时按最小二乘的原则,解求这些参数。
43、相关系数与信噪比之间的关系
44、单点最小二乘影像匹配(框图)
 升级会员
升级会员 