电液压回路设计实例word文档.docx
《电液压回路设计实例word文档.docx》由会员分享,可在线阅读,更多相关《电液压回路设计实例word文档.docx(18页珍藏版)》请在冰豆网上搜索。
电液压回路设计实例word文档
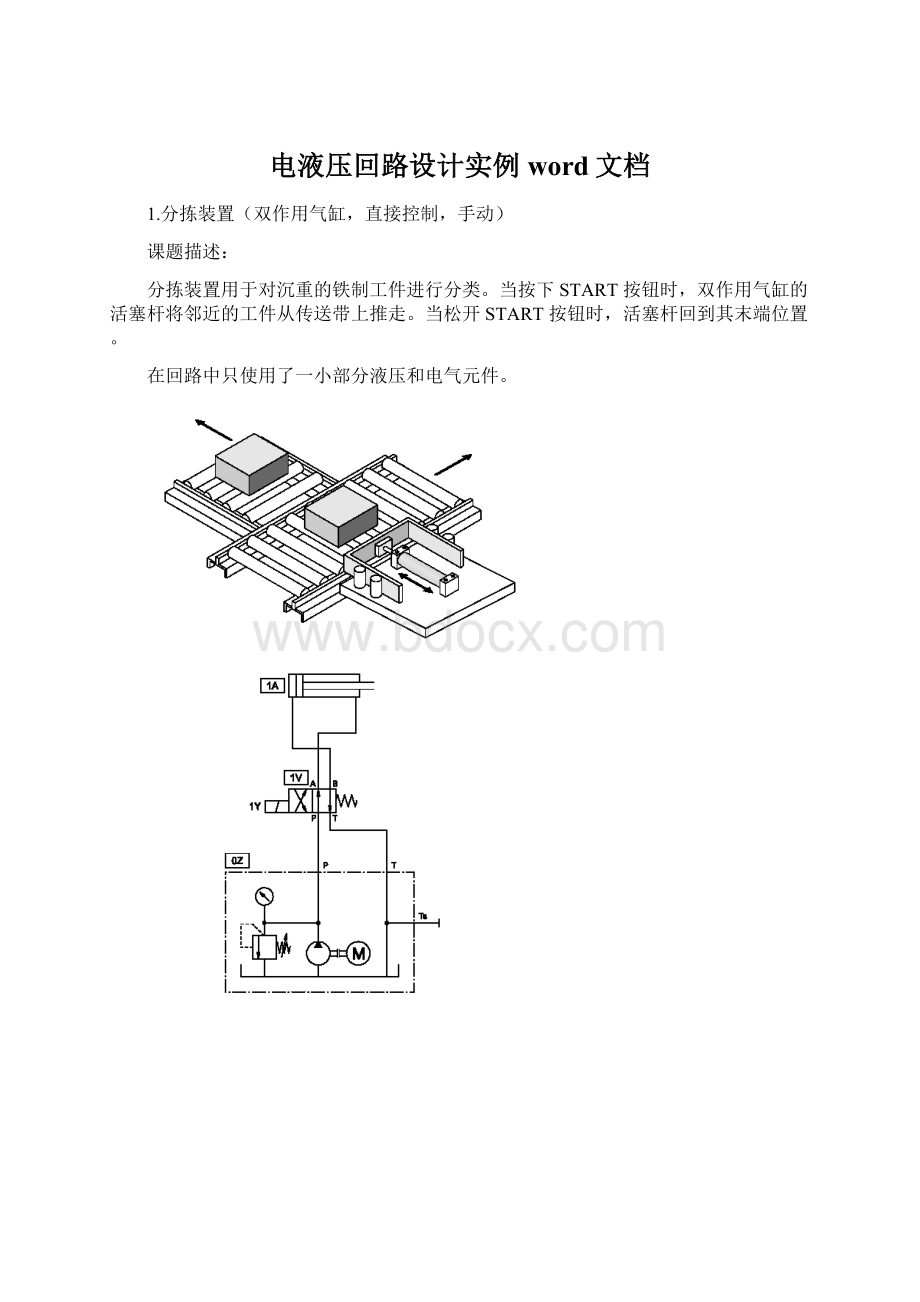
1.分拣装置(双作用气缸,直接控制,手动)
课题描述:
分拣装置用于对沉重的铁制工件进行分类。
当按下START按钮时,双作用气缸的活塞杆将邻近的工件从传送带上推走。
当松开START按钮时,活塞杆回到其末端位置。
在回路中只使用了一小部分液压和电气元件。
2.传送带上的元件选择(双作用气缸,间接控制,手动)
课题描述:
双作用气缸将未封口的纸箱从一个传送带推倒另一个传送带上。
气缸的前进行程是手动控制的。
进程速度可以调节,但是回程速度是固定的。
要固定气缸和方向控制阀的上限压力。
3.提升装置(单作用气缸,间接控制,手动)
课题描述:
通过提升装置,纸箱从一个传送带提升到包装传送带的高度。
升降台的上升和下降可以通过单作用液压缸手动控制。
进程可以调节,但回程不能调节,这是由升降台的重量决定的。
要固定方向控制阀和气缸的上限压力。
4.弯曲机(双作用气缸,闭锁装置)
课题描述:
带有双作用气缸的弯曲机用来制造U型金属片。
该操作的启动信号由按钮给出。
当工件被弯曲成形后,另一个按钮给出气缸回程的信号。
本练习中,由于使用普通工件,没有过多的安全规则。
进程和回程运动在可调的低速下完成。
应该使用什么类型的节流阀,以保证可调速度不由负载决定?
当按下启动按钮S1时,继电器K1被激活;常开触点K1将继电器K1的电压锁住。
同时,电流通过触点K1提供给线圈1Y。
线圈使4/2电磁阀开启,活塞杆伸出并前进至终端位置,直至按下返回按钮S2,S2将继电器K1电路中断。
这也会引起线圈1Y的电路中断,活塞杆返回到初始位置。
系统中必须安装一个流量控制阀,以保证速度不会随着负载变化而变动。
该阀应该安装在方向控制阀的上流部分,并且可以控制进程和回程速度。
5.压力装配机(双作用气缸,闭锁装置通过压力开关回程)
课题描述:
压力装配机用于装配工件。
如果预定的压力太大(比如,如果排列不正确),出于安全角度,活塞杆必须缩回。
在装配操作完成后,当压力开关的压力达到预定压力3MPa(30bar)时,回程运动被激活。
描述回路接通时的位置,如果监测到节流阀所能承受的上限值,在这个点上的压力开关被打开。
哪个点是测量压力的正确点?
当按下启动按钮S1时,继电器K1被激活;继电器K1的电压由第一个常开触点K1保持。
同时,线圈1Y的回路通过触点K1关闭。
4/2电磁阀切换,活塞杆前进直到压力达到压力开关1B预先设定的压力值。
压力开关通过K2撤除K1的自锁。
这也会中断线圈1Y的电路。
由于弹簧力和活塞杆的返回,4/2电磁阀也转换到其初始位置。
在单向节流阀的上游部分安装压力传感器:
如果进程速度可以有节流阀控制,当回路开启时,节流阀要承受很大的阻力,节流阀的上限压力将上升到30bar。
这种情况的结果是压力开关在系统达到装配压力之前,压力开关激活回程运动。
因此,压力必须能够在气缸的进气口直接测量。
6.压印机(双作用气缸,微分回路)
课题描述:
一个压力很低的液压泵的传输速度便可操控压印机。
为增加进程速度,要使用合适的回路。
液压泵的输出要满足这个要求。
微分回路只适用于带有单末端位置活塞杆的气缸,并且能够提升进程速度,同时,压力作用在活塞的两个面上。
由于两个面的面积不同,所以产生的力也不同,导致活塞杆的前进。
压力作用的有效面积是由活塞杆的表面积决定的。
这就是为什么在进程速度增加时,比起作用在单边活塞表面的压力会更小一点。
3/2电磁阀的电磁线圈1Y通过启动按钮S1而激励。
在活塞杆前进过程中,液压油是可循环使用的。
如果按下返回按钮S2,1Y被激活,3/2电磁阀通过弹簧力而切换,活塞杆缩回。
流量控制阀用于降低液压泵的输出压力。
因此,微分回路的作用更加明显。
7.控制门(双作用气缸,互锁缓动操作)
课题描述:
双作用气缸用于打开和关闭熔炉门。
缓动操作可以在任何一个位置驱动门。
在每个位置上,气缸通过液压加紧。
液控阀可以阻止活塞杆由于牵引负载的作用而被拉出。
只有按下“关门”按钮S1时,先导式单向阀才会打开,3/2阀进行切换,使活塞杆前进。
当松开S1时,3/2电磁阀返回到初始位置,单向阀立刻关闭。
通过液压夹紧的活塞杆保持不动。
液压夹紧装置保证活塞杆不会被牵引负载拉出。
再次按下S1时,活塞杆前进直到达到所要求的末端位置。
当按下“开门”按钮S2时,活塞杆缩回。
松开S2时,4/3电磁阀切换,同时活塞杆保持不动并被夹紧。
按钮S1和S2是机械互锁的。
如果同时按下这两个按钮或者先按下一个后再按下另一个按钮,活塞杆将停止运动。
单向节流阀安装在活塞杆的一侧,以保证在关门时发生背压现象。
这个压力首先用于提供反向操作,其次可以保证先导式单向阀可靠的开度。
8.加工单元(微分回路通过行程开关回程)
课题描述:
工件边缘必须是斜面的。
通过使用改良后的工具可以减少加工时间,同时,通过微分回路可以使进给速度增加。
夹紧装置一次可夹紧
5个工件。
当工件少于5个时,为了降低工作行程,气缸的回程运动通过可调式行程开关控制。
按下S1时电路启动。
4/3电磁阀切换,启动回路。
4/3电磁阀切换,活塞杆边缘的油液和液压泵传送的油压共同作用,使气缸开始进程运动。
当活塞杆到达行程开关1S2的位置时,4/3电磁阀和4/2电磁阀进行切换,活塞杆缩回。
当活塞杆到达行程开关1S1时,即缩回到了终端位置,4/2电磁阀回到其初始状态。
一个新的运动循环过程随即开始。
在这个回路中,流量控制阀只有在限制泵压力中使用,这样可以清晰地看出微分回路的作用。
9.钻机的进给(快速进给回路,通过行程开关控制速度)
课题描述:
钻机的进给是自动的。
当进行大尺寸的钻机运动时,必须达到恒定的进给特性和微调得出的进给速度。
因此,钻机必须装有液压进给装置,该装置提供快速进给运动和可以微调的工作进给运动。
返回形成运动通过按下第二个按钮而激励。
在这个阶段,通过单向阀的作用,可以不使用流量控制阀。
在快进运动中,二通调速阀属于2/2方向控制阀的支路,转换快速进给速度,该速度是由位置决定的,并且通过行程开关1S2激励,行程开关通过继电器K2为电磁线圈1Y2提供电信号。
S2按钮可激活活塞杆的回程运动。
在活塞杆回到末端位置时,行程开关1S1激励2/2阀切换,使活塞杆开始再次运动。
10.压力机(有行程开关和压力开关的压力控制回路)
课题描述:
液压压力机用于定形工件。
初始压力p1=1.5MPa(=15bar)慢慢地用于材料定形。
在运动大约100mm压力行程后,该压力转换为一个更高的压力p2=4MPa(=40bar)。
当压力操作完成后,压力开关上的压力增加到最大值p3=5MPa(=50bar)。
当达到这个值时,压力开关激活压力机的回程运动。
流量可以通过流量控制阀来调节。
当按下启动按钮S1时,继电器K1通过电路2的常开触点被激活并锁住。
随后,K1的常开触点激励4/2电磁阀的电磁线圈1Y1,活塞杆前进。
2/2阀保持打开状态,导致溢流阀在它的低压设置中可以操作。
当活塞杆到达行程开关1S位置时,2/2阀不再起作用,在第二个溢流阀上压力设置被转换。
当活塞杆到达前进终端位置时,压力继续上升直到达到预先设定的压力。
压力开关撤除K1和K2的闭锁。
K1切换4/2电磁阀使其激励活塞的回程运动。
继电器K2被激励,通过电路7
上的一个常闭触点而开始工作,将系统转换至低压状态。
随后可以进行重复运动。
11.进给装置(有行程开关的卸压支路)
课题描述:
双作用气缸用于从金属工具中推出被压紧的锻造工件。
由于材料不同,锻造件的冷却时间显著增加。
为了避免液压油温度不必要的上升,在推出工件后,回路必须转换到卸压支路上。
当按下START按钮S1时,继电器K1的线圈被激活。
继电器K1通过它的第一个常开触点而被锁住。
K1的常闭触点激活继电器K3,使得K3的常开触点断开,同时激活电磁阀0Y2。
结果,2/2阀切换,中断卸压支路,液压泵直接和系统连接。
由于供给电磁线圈1Y1的K1常开触点也被关闭,4/2电磁阀切换,活塞杆前进到行程开关1S1的位置。
1S1通过K2取消K1的闭锁而作用,因此激励电磁线圈1Y1,并切换4/2电磁阀至气缸回程位置。
当活塞杆到达行程开关1S2的末端位置时,2/2阀再次切换到卸压支路。
这种做法的结果是,泵不是在
50bar的系统压力下传输动力,它只能在2/2阀的限制下工作。
12.装配装置(通过气缸和液压马达进行压力顺序控制)
课题描述:
装配装置用于将塑料配件安装在铁制工件中。
然后用螺丝固定以保证连接的安全性。
当START按钮S1被按下时,立式双作用压力气缸1A将塑料配件压入铁制工件中。
当压力气缸中活塞腔的压力达到4.5MPa(45bar)时,水平液压马达3M拧入左手边的螺孔中。
当RETURN按钮S2被按下时,压力气缸1A缩回,液压马达M停止。
当关闭液压泵后,气缸千万不要滑落。
测量时必须保证在任何情况下,马达都不会顺时针转动。
气缸进行压力装配的速度必须是可调的。
显示器要显示RETURN按钮S2的位置。
指示器可以显示RETURN按钮S2的位置。
指示器千万不能关闭,除非开关是打开的。
当按下启动按钮S1时,继电器K1激活并被锁住。
电路7中,K1的常开触点激活4/3电磁阀的电磁线圈1Y1。
使得气缸1A的活塞杆前进。
当压力达到1B时,继电器K3被激活。
使得电路
9中继电器K3的常开触点关闭,液压马达逆时针转动。
活塞杆保持前进,直到开关S2切换。
当开关S2切换时,它的位置可以从指示器中看出。
S2撤除继电器K1和K3的闭锁,使4/3电磁阀切换,气缸开始做回程运动。
同时,压力也会下降。
压力开关使继电器K3再次激活,导致在电路9中K3的常开触点打开,进而,2Y被激活,4/2电磁阀通过弹簧力而切换。
马达停止转动。
只有松开S2后(指示器灯熄灭),4/3电磁阀切换到中位,一个新的工作周期随即开始。
在实际中,压力传感器在检查气缸1A是否达到末端位置时不能单独使用。
一个附加的行程开关可以用于末端位置的检测。
13.包裹提升装置(通过双气缸进行位置顺序控制)
课题描述:
包裹通过X方向上的传送带进给,并被气缸1A提升起来。
气缸2A将包裹推至Y方向的传送带上,进行后续的运输。
在此之后,两个双作用气缸返回到它们的初始位置。
当按下START按钮S时,继电器K1激活并被锁住。
在电路9中,继电器K1的常开触点激活4/3电磁阀的电磁线圈1Y1。
使得气缸1A的活塞杆前进,直到达到行程开关1S2的位置。
在气缸1A前进时,1S2激活继电器。
在电路10中,继电器K2的常开触点激活4/2电磁阀的电磁线圈2Y,气缸2A的活塞杆前进,直到达到行程开关2S2的终端位置。
2S2激活继电器K3,在电路1和3中,K3的常闭触点激活继电器K1和K2。
因此,2S2撤除K1中1Y1和K2中2Y的闭锁。
1Y2使4/3电磁阀切换,气缸1A的活塞杆缩回。
由于2Y被激活,4/2电磁阀通过弹簧力而切换,气缸2A的活塞杆也随之缩回。
只有在两个活塞杆都达到它们的终端位置时,1Y2才会被激活,4/3电磁阀通过弹簧力切换到其中位。
(注:
素材和资料部分来自网络,供参考。
请预览后才下载,期待你的好评与关注!
)
 升级会员
升级会员 